
Overview
Design Resources
Design & Integration File
- Schematic
- Bill of Materials
- Gerber Files
- PADS Files
- Assembly Drawing
Evaluation Hardware
Part Numbers with "Z" indicate RoHS Compliance. Boards checked are needed to evaluate this circuit.
- DEMO-AD5700D2Z ($121.82) Complete 4 mA to 20 mA Loop Powered Field Instrument with HART Interface
Device Drivers
Software such as C code and/or FPGA code, used to communicate with component's digital interface.
Features & Benefits
- Complete 4mA to 20mA loop powered field instrument
- HART compliant interface
- Registered by HART Communication Foundation (HFC)
- Low power, small footprint
Product Categories
Markets and Technologies
Parts Used
Documentation & Resources
-
Complete 4 mA to 20 mA Loop Powered Field Instrument with HART Interface2/18/2013PDF259 kB
Circuit Function & Benefits
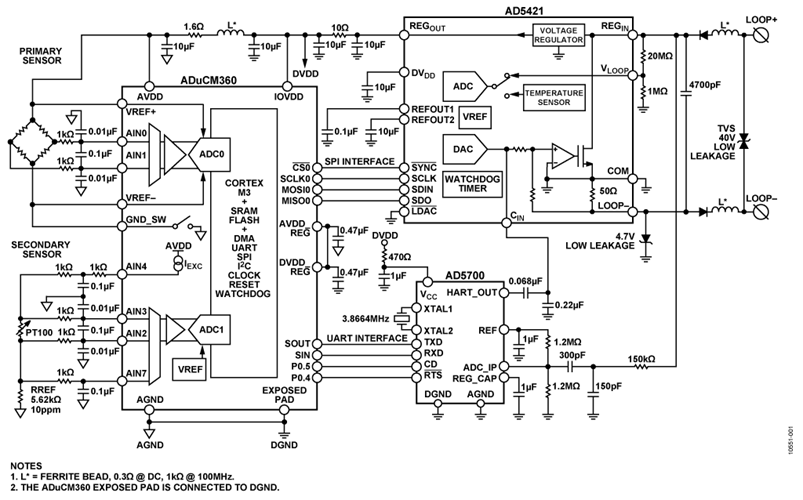
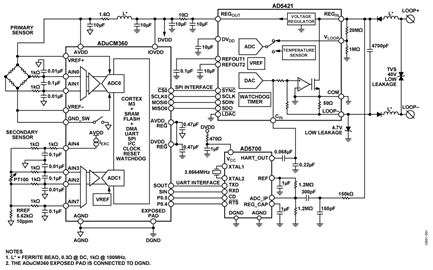
The circuit shown in Figure 1 is a complete smart industrial, loop powered field instrument with 4 mA to 20 mA analog output and a highway addressable remote transducer (HART®) interface. HART is a digital 2-way communication in which a 1 mA peak-to-peak frequency-shift-keyed (FSK) signal is modulated on top of the standard 4 mA to 20 mA analog current signal. This allows features such as remote calibration, fault interrogation, and transmission of process variables, which are necessary in applications such as temperature and pressure control.
This circuit has been compliance tested, verified, and registered by the HART Communication Foundation (HCF). This successful registration provides circuit designers with a high level of confidence using one or all of the components in the circuit.
The circuit uses the ADuCM360, an ultralow power, precision analog microcontroller, the AD5421, a 16-bit, 4 mA to 20 mA, loop powered digital-to-analog converter (DAC), and the AD5700, the industry’s lowest power and smallest footprint HART compliant IC modem.




Circuit Description
Analog Front-End Interface
The ADuCM360 analog front-end incorporates dual, high performance 24-bit sigma-delta (Σ-Δ) analog-to-digital converters (ADCs). It also integrates programmable gain instrumentation amplifiers, a precision band-gap reference, programmable current sources, a flexible multiplexer, and many other features. It allows a direct interface to multiple analog sensors, such as pressure sensor bridges, resistive temperature sensors, thermocouples, and many other types of sensors used in the industry.
The circuit in Figure 1 shows an example connection for a primary bridge type sensor and a secondary resistive temperature sensor; however the ADuCM360 flexible front-end allows many other configurations to accommodate any type of precision analog sensor application.
Primary Sensor Input
The ADuCM360 on-chip ADC0 measures the field instrument primary sensor, shown as a bridge transducer in Figure 1. The sensor connects to the analog input pins, AIN0 and AIN1, via an RC filter network for improved system electromagnetic immunity. The common-mode filter bandwidth is approximately 16 kHz, and the differential-mode bandwidth is 800 Hz.
The ADuCM360 VREF+ and VREF− voltage reference inputs sense the bridge excitation voltage and enable the circuit to work in a ratiometric mode, making the measurement independent of the exact value of the sensor power supply voltage. The on-chip ground switch can dynamically disconnect the bridge excitation and save power when required by the application.
Secondary Sensor Input
The circuit uses a platinum (Pt) 100 Ω resistive temperature device (RTD) as a secondary sensor. The RTD can sense the temperature of the primary sensor and thus allow for temperature compensation of the primary sensor if required.
The ADuCM360 programmable current source supplies the RTD via the AIN4 pin. The ADC1 on the ADuCM360 measures the voltage across the RTD using the AIN3 and AIN2 pins configured as a differential input. The exact value of the current flowing through the RTD is sensed by a precision resistor (RREF) and is measured by the ADC1 using the AIN7 pin. The ADC1 uses the on-chip, band-gap voltage reference.
Digital Data Processing, Algorithm, and Communications
All the field instrument digital functions are provided by the ADuCM360 32-bit ARM Cortex™ M3 RISC processor, with integrated 128 k bytes of nonvolatile flash/EE memory, 8 k bytes of SRAM, and an 11-channel direct memory access (DMA) controller that supports wired (2× SPI, UART, I²C) communication peripherals.
The demonstration software performs the initialization and configuration, processes data from the analog inputs, controls the analog output, and performs the HART communication.
Analog Output
The AD5421 integrates a low power precision 16-bit DAC with a 4 mA to 20 mA, loop powered output driver and provides all functions required for the field instrument analog output.
The AD5421 interfaces with the ADuCM360 controller via the SPI interface.
The AD5421 also includes a range of diagnostic functions related to the 4 mA to 20 mA loop. The auxiliary ADC can measure the voltage across the instruments loop terminals via the 20 MΩ/1 MΩ resistive divider connected to the VLOOP pin. The ADC can also measure the chip temperature via the integrated sensor. The ADuCM360 controller can configure and read all the diagnostics of the AD5421, but the AD5421 can also operate autonomously.
As an example, if the communication between the controller and the AD5421 fails, the AD5421 automatically sets its analog output to a 3.2 mA alarm current after a defined period. This alarm current indicates to the host that the field instrument failed to operate.
The software controls any change of the output current from one value to another to prevent disturbance of the HART communication. (See the Analog Rate of Change section).
HART Communication
The AD5700 integrates a complete HART FSK modem. The modem is connected to the ADuCM360 controller via a standard UART interface, complemented by request to send (RTS) and carrier detect (CD) signals.
The HART output is scaled to the required amplitude by the 0.068 μF/0.22 μF capacitive divider and coupled to the AD5421 CIN pin, where it is combined with the DAC output to drive and modulate the output current.
The HART input is coupled from LOOP+ via a simple passive RC filter to the AD5700 ADC_IP pin. The RC filter works as the first stage, band-pass filter for the HART demodulator and also improves the system electromagnetic immunity, which is important for robust applications working in harsh industrial environments.
The AD5700 low power oscillator generates the clock for the HART modem with a 3.8664 MHz external crystal connected directly to the XTAL1 and XTAL2 pins.
Output Protection
A transient voltage suppressor (TVS) protects the 4 mA to 20 mA HART interface from overvoltage. Its voltage rating should prevent exceeding the AD5421 absolute maximum voltage of 60 V on the REGIN pin. Note that the TVS leakage current can affect the current output accuracy; therefore, pay attention to the leakage current at a given loop voltage and temperature range when selecting this component.
An external depletion-mode FET can be used with the AD5421 to increase the loop voltage maximum
The circuit is protected against reversed polarity by a pair of diodes in series with loop output.
The ferrite beads in series with the loop together with the 4700 pF capacitor improve the system EMC performance. Do not use a higher capacitance across the loop terminals because of the HART network specifications.
The 4.7 V, low leakage, Zener diode protects the AD5421 on-chip, 50 Ω loop sense resistor in the event of an accidental external voltage between the AD5421 COM pin and LOOP− pin (for example, when programming the ADuCM360 or debugging the circuit).
Power Supplies and Power Management
The complete field instrument circuitry, including the sensor drive current, must operate on the limited amount of power available from the 4 mA to 20 mA loop. This is a common challenge in any loop powered field instrument design. The circuit in Figure 1 provides an example of delivering both a low power and high performance solution. All three integrated circuits used in the application are designed for low power, and the circuit leverages their integrated features to deliver a flexible power management structure and an optimum loop-powered solution.
The AD5421 is powered by the 4 mA to 20 mA loop voltage and provides a regulated low voltage for the rest of the circuit. The AD5421 REGOUT voltage is pin programmable from 1.8 V to 12 V depending on circuit requirements. The circuit in Figure 1 uses the 3.3 V supply voltage option as an example for the input sensors used. However, the ADuCM360 and the AD5700 have a wider power supply voltage range; therefore, a different power supply voltage can be used to suit the application.
The REGOUT RC filter (10 μF/10 Ω/10 μF) helps to prevent any interference coming from the loop affecting the sensor analog front-end. It also prevents any interference generated by the circuit, specifically by the controller and the digital circuitry, from coupling back to the loop, which is important for a reliable HART communication.
The AD5700 HART modem is supplied through an additional RC filter (470 Ω/1 μF). This filter is very important in the loop powered application because it prevents current noise from the AD5700 from coupling to the 4 mA to 20 mA loop output, which would otherwise affect the HART communication. The 4 mA to 20 mA loop noise performance is specifically addressed by the HART in-band, noise during silence test. The AD5700 modem uses the external crystal with 8.2 pF capacitors to ground on the XTAL1 and XTAL2 pins, which is the option using the least possible power.
The ADuCM360 has very flexible internal power management, with many options for powering and clocking all the internal blocks and, when utilized by the software, allows an optimal balance between the required function, performance, and power for the specific instrument application. Refer to the ADuCM360 product page and the AN-1111 Application Note.
The analog front-end AVDD is supplied from another filter (10 μF/ferrite bead/1.6 Ω/10 μF) to minimize power supply noise for better performance with respect to low voltage sensor signals.
The GND_SW ground switch pin of the ADuCM360 controls the excitation/power supply for the primary sensor. The switch is off as a default at the instrument power up. This default allows the system to be fully configured, including appropriate power modes, before turning on the sensor, and thus minimizes any possible power-up spikes on the 4 mA to 20 mA loop output.
Similarly, the secondary sensor is supplied from the programmable current source of the ADuCM360, and therefore, its power is fully controlled by the software.
ADuCM360 Software
A basic code example that demonstrates the functionality and performance of the circuit can be found in the CN-0267 Design Support Package.
The code example includes a basic HART slave command response to demonstrate the hardware function and capability. However, the code example does not include the protocol layers of the HART communication.
Common Variations
The ADuCM360 has a high performance and very flexible analog front-end, with 12 analog input pins and extra pins for voltage reference and ground switch. It allows direct interface to multiple analog sensors of varying types, such as any resistive bridge sensors, resistive temperature sensors, or thermocouples. Therefore, do not limit the field instrument solution to temperature-compensated pressure measurement only because it can be used for almost any sensor field instrument.
The ADuCM361 can be used as an alternative to the ADuCM360 in applications that need only one Σ-Δ ADC in the analog front-end. Aside from the second ADC, the ADuCM361 contains all the features of the ADuCM360.
The ADuCM361 on-chip DAC with an external transistor can be used to control the 4 mA to 20 mA loop, refer to CN-0300 for details.
The AD5421 can be connected via the protection directly to the loop. Alternatively, a depletion mode N-channel MOSFET can be connected between the AD5421 and the loop power supply, as shown in Figure 2. The use of the additional MOSEFT in this configuration keeps the voltage drop across the AD5421 at approximately 12 V, lowers the power dissipated in the AD5421 package, and therefore improves the 4 mA to 20 mA analog output accuracy. It also increases the maximum voltage allowed in the loop to the level of the MOSFET rating. The additional MOSFET has no effect on the HART communication.


The AD5700 is used with a 3.8664 MHz crystal in this circuit, which is the configuration achieving the lowest power consumption. Alternatively, the AD5700-1, with an integrated 0.5 %precision internal oscillator, can be used. The internal oscillator increases the modem power supply current by 225 μA maximum, compared to the crystal oscillator, but because no external crystal is needed, this option provides both cost savings and reduced board area requirements.
For the applications that are not loop powered, the AD5410, AD5420, AD5422, or AD5755 are good choices for the 4 mA to 20 mA DAC.
Circuit Evaluation & Test
Circuit Hardware
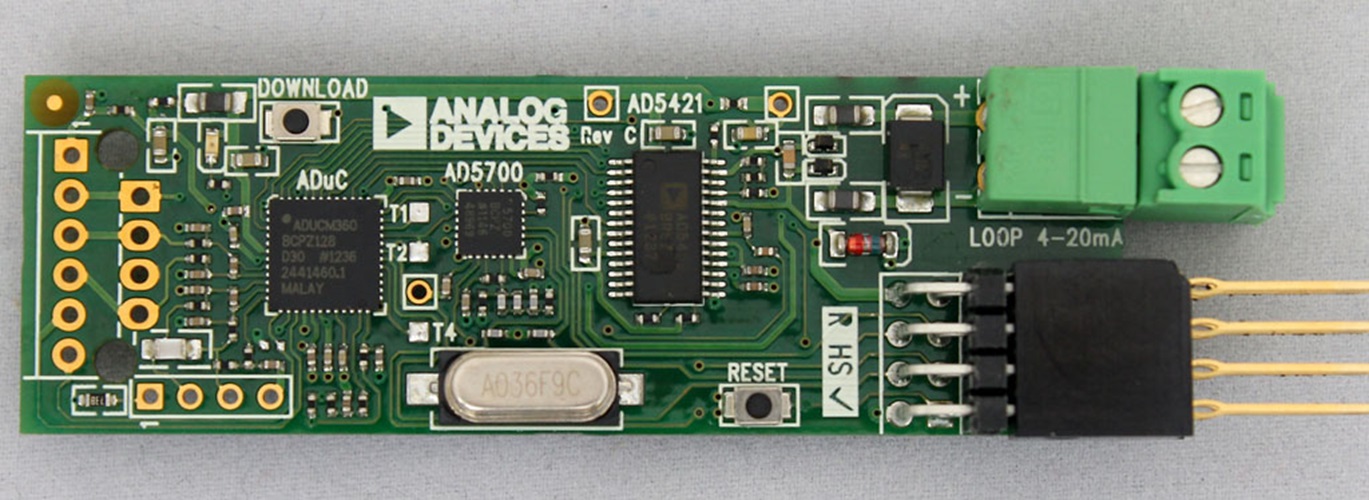
The circuit shown in Figure 1 is built on the DEMO-AD5700D2Z printed circuit board shown in Figure 3.
The DEMO-AD5700D2Z circuit board includes some additional features for easy system evaluation. The 0.1 inch-pitch connector footprints allow optional primary and secondary sensor connections. There are test points for HART RTS and CD signals, which may be needed for HART compliance tests.
A connector on the edge of the DEMO-AD5700D2Z makes the ADuCM360 single wire and UART download/debug signals accessible allowing easy software development, code download and in-circuit debugging and emulation. The connector—with a small header extender included with the DEMO-AD5700D2Z board—is compatible with all the Analog Devices, Inc., Cortex-M3 based development tools, such as the EVAL-ADuCM360QSPZ evaluation kit (the evaluation kit is not included with the DEMO-AD5700D2Z board).
These features are not shown in the simplified diagram in Figure 1; however, they can be seen in the complete circuit schematic in the CN-0267 Design Support Package. The design support package also includes a full field instrument C-code example, which enables complete verification and evaluation of all hardware blocks and features of the circuit, and a limited verification of the HART interface functionality. For detailed information about HART interface specifications and resources, please contact the Hart Communication Foundation.
HART Compliance
The DEMO-AD5700D2Z has been verified to be compliant with HART FSK Physical Layer Specification (HCF_SPEC-054, Revision 8.1), using methods and equipment specified in the HART Physical Layer Test Specification (HCF_TEST-2, Revision 2.2). The board was submitted to the Hart Communication Foundation and was successfully registered.
The registered circuit can be found on the HART Communication Foundation (HFC) web site in the product catalog as DEMO-AD5700D2Z.
The results of two of the tests involved the output noise during silence and the analog rate of change.
Output Noise During Silence Test
When a HART device is not transmitting (silence), do not couple noise onto the network. Excessive noise may interfere with reception of HART signals by the device itself or other devices on the network.
The voltage noise measured across a 500 Ω load in the loop must contain no more than 2.2 mV rms of combined broadband and correlated noise in the HART extended frequency band. In addition, the noise should not exceed 138 mV rms outside the HART extended frequency band.
This noise was measured by a true rms meter across the 500 Ω load. This noise was measured directly for the out-of-band noise and measured through the HCF_TOOL-31 filter for the in-band noise. An oscilloscope was also used to examine the noise waveform.
The noise was measured at the worse condition, which was 4 mA output current. The captured noise waveform is shown in Figure 4, and the results are summarized in Table 1.


| Output Noise | Measured (mV) | Measured (mV) |
| Outside Extended Frequency Range | 4.13 | <138 |
| Inside Extended Frequency Range | 1.03 | <2.2 |
Analog Rate of Change Test
This specification ensures that when a device regulates the analog output current, the maximum rate of change of analog current does not interfere with HART communications. Step changes in current disrupt HART signaling.
The worst-case change in the analog output current must not produce a disturbance higher than 15 mV peak, measured across a 500 Ω load in the HART extended frequency band.
The AD5421 DAC and output driver are relatively fast. Therefore, to meet the required system specification, the output current change is controlled by combining hardware slew-rate limiting implemented at the AD5421 and a digital filter implemented in the ADuCM360 software.
The hardware slew-rate limit is set by the capacitance connected to the AD5421 CIN pin. When a large step change is required in the analog output current value, the ADuCM360 software splits the output current change sent to the AD5421 DAC into a number of smaller subsequent steps.
This test was performed using an oscilloscope coupled to the 500 Ω load through the HCF_TOOL-31 filter.
The result is shown in Figure 5. Waveform CH1 shows the periodic steps between 4 mA and 20 mA, sensed directly across the 500 Ω load. Waveform CH2 is the signal captured on the HCF_TOOL-31 filter output, amplified 10×, within the 150 mV peak limits.


Circuit Power Consumption
Two methods were used to evaluate the circuit power consumption performance.
In the first method, the current from the AD5421 integrated voltage regulator output was measured.
Considering the minimum analog output current of 4 mA and HART output ac modulation of 0.5 mA peak, the maximum current consumed by the circuit in normal mode operation must be less than 3.5 mA. The AD5421 requires a 0.3 mA maximum for its own operation, which leaves approximately 3.2 mA maximum current for the AD5421 REGOUT output.
For ease of in-circuit measurement, the DEMO-AD5700D2Z has test points (T5, T6) on each side of the 10 Ω resistor in the REGOUT output filter, as shown in Figure 6. This setup allows the voltage drop across the resistor to be measured, and the current to be calculated without interrupting the supply current or disturbing the circuit.


The results are shown in Table 2 and were measured at the following conditions:
- REGOUT = 3.3 V
- ADuCM360 M3 core clock = 2 MHz
- Both ADCs converting at 50 samples per second
- ADC0 has both buffers on and gain = 8
- ADC1 has both buffers on and gain = 16
- RTD excitation current = 200 μA
- SPI communicating to AD5421 with serial clock = 100 kHz
- HART communicating
The circuit with all relevant analog and digital blocks, including the input sensor, consumes power supply current within the budget allowed at the minimum 4 mA loop current.
| Input Sensor | Voltage T5 to T6 Maximum (mV) | Current REGOUT Maximum (mA) |
| None | 24.4 | 2.44 |
| 24PCDFA6D (5 kΩ, 0.66 mA at 3.3 V) | 31.0 | 3.10 |
In the second method for assessing the circuit power consumption, the circuit was verified to function as expected with the analog output current set to the minimum of 4 mA while performing HART communication. The result showed that the circuit delivered the 4 mA current and showed no distortion of the HART output signal.
Primary Sensor Input Performance
The ADuCM360 integrates most of the analog front-end on chip; therefore, the performance of the analog input is primarily determined by the specifications of the ADuCM360.
The level of noise is the main factor that can be influenced by the interaction of the analog front-end with the rest of the circuitry on the board. Thus, tests were carried out to focus on the noise and related resolution performance of the system.
The demonstration was configured to transmit data from the primary analog input, expressed as pressure in kPa, over the HART communication. One hundred samples were captured, and a basic data analysis to quantify the performance was completed. Two of the tests involved the following:
- The first test was performed with a standard pressure sensor (Honeywell 24PCDFA6D) soldered directly on the board.
- A second test was performed with the primary input signal generated by a set of fixed and variable resistors, as shown in Figure 7.


The performance summary can be seen in Table 3, and the signal plots are shown in Figure 8 and Figure 9.
| Parameter | Pressure Sensor | Resistive Network |
| Full Scale | 207 kPa | 246 kPa |
| Noise RMS | 1.3 Pa | 0.68 Pa |
| Peak-to-Peak Noise | 6.8 Pa | 3.6 Pa |
| Resolution Effective (rms) | 17.2 bit | 18.5 bit |
| Noise-Free Resolution (p-p) | 14.9 bit | 16.1 bit |




Similar to the primary sensor, the performance of the secondary sensor input is mainly determined by the analog front-end of the ADuCM360 with the exception of noise performance.
The analog input was configured to transmit temperature in degrees Celsius (°C) to a master over the HART communication path. Analysis was performed on two tests of 100 samples to quantify the performance.
The first test was performed using the platinum 100 Ω sensor on the board, and the second test was performed with the sensor replaced on the board by a standard (fixed) 100 Ω ± 1% resistor.
The performance summary is shown in Table 4, and the signal plots are shown in Figure 10 and Figure 11.
| Parameter | Pressure Sensor | Resistive Network |
| Noise RMS | 0.037°C | 0.033°C |
| Noise P-P | 0.19°C | 0.16°C |



