資料ライブラリ
AN-557: An Experimenter’s Project for Incorporating the AD9850 Complete-DDS Device as a Digital LO Function in an Amateur Radio Transceiver*
PIC “N” MIX Digital Injection System
Part 1 of 5
This construction project brings together a number of themes which I have been kicking around for some time. But first, why PIC “N” MIX?
Two Essential Terms
PIC—A range of microcontrollers produced by Arizona Microchip Inc. In this application, the PIC16C84.
DDS—Direct Digital Synthesis. The technique of digitally generating the output frequency directly (as opposed to typically mixing the output of a VFO with a crystal oscillator—or employing phase-locked loop techniques). In this application the Analog Devices AD9850 “complete DDS synthesizer” chip is used.
In Brief . . .
PIC “N” MIX provides PIC controlled direct generation of the required injection frequencies into the signal frequency mixer in your transceiver.
PIC “N” MIX also in the sense that you can pick and choose which functional elements you build; and in the sense that there are by design a number of different mechanical configurations to best suit your circumstances.
You are also presented with the radical choice of using the software I have designed—or writing your own.
The PIC microcontroller (and about 400 hours of software development) provides control and operational flexibility while the DDS chip is used to synthesize the RF output giving stability and low-phase noise.
Converging Themes
Discounting the value of your time, I would argue that for years it has been viable to build multiband HF transceivers which outperform their commercial counterparts at any point on the price versus performance graph—from the cheap and cheerful through to the truly exotic. Except, that is, for one critical element—the injection oscillator.
I have been building VFOs for years that for all practical purposes didn’t drift. Almost all were based on the Vackar running somewhere between 5 MHz–10 MHz. Besides some time consuming temperature compensation, I never gave them a second thought.
But they need about eight x’tals, a mixer and switched bandpass filters before they can feed both the signal frequency mixer—and a frequency counter which gives a natural display of exactly not quite the frequency you are on! It can all be made to work, but only at substantial cost in time, money and space. And the only incremental feature easily obtained is IRT.
Then in February 1996, Technical Topics reported the results of some phase noise measurements made by Colin Horrabin, G3SBI and Jack Hardcastle, G3JIR on a stable Vackar as “rather disappointing.” This set me thinking. Most of us ignore oscillator phase noise because we can’t measure it. Myself included. Does it really matter in practice?
The ARRL handbook has an excellent section on the subject which concludes “. . . far-out phase noise can significantly reduce the dynamic range of a receiver. Farout phase noise performance has effects just as critical as blocking dynamic range and two-tone dynamic range performance of receivers.” Yes, but does it really matter in practice? I mean, am I truly going to fail to copy real signals on a significant number of occasions because of poor phase noise performance?
I determined to find out by adopting the simple expedient of fitting a changeover switch between my traditional VFO and a phase-quiet alternative of the same power output. Then, under a variety of practical conditions, could I tell the difference? The problem, of course, was to find this alternative without spending impracticable sums of money.
Technical Topics came to the rescue again by first bringing to my notice the Analog Devices AD9850 DDS chip. A few minutes on the Internet produced the data sheet—and it all looked too good to be true.
So, I set about designing some traditional TTL to control it and actually got as far as building some of the boards before giving up. Because although I have no doubt it would have worked, 28 TTL chips to control one DDS chip—and provide a modest range of useful features—was ignoring any reasonable definition of the “in practice” imperative.
It was obvious from the outset that some form of microcontroller would provide the solution to the control problem and at the same time offering the ability to provide a range of operational features. What put me off for months was the costs of acquiring the development environment and the hardware to program the chip. A glance in the larger catalogues suggested little change from a £200 investment for PIC development—totally unacceptable.
The bottom line is this. Arizona Microchip provide on their website their complete development environment at no cost—as well as copious application material. And there are numerous circuits for PIC Programmers published on the Internet which you can build for less than £5. The project was born.
. . . And the Conclusion?
Phase noise does matter in practice. On a substantial number of occasions it makes the difference between R2 and R5 on SSB signals.
For example, the home-brew net convenes daily around lunch time on 80 m just down from the SSTV calling frequency and just up from a prominent French coastal station. A convenient source of large adjacent channel signals.
If the band is flat and quiet, it makes no difference. If conditions are lively—using the DDS source—then I can often copy Ed, EI9GQ at only just R5. Switch over to the VFO and the readability instantly degrades to near hopeless if and only if there is significant adjacent channel activity. The effect is insidious. Its not that Ed’s signal goes down. Its that the base level of band background noise appears to go up. It doesn’t of course.
What is happening is that the noise sidebands on my VFO are mixing with adjacent signals to produce incremental noise in the passband. A very salutary experience because this noise is totally indistinguishable from band noise and you could operate for years without realizing what was happening.
It would seem that there is a basic conflict in VFO design. The traditional view is that you drive the oscillator gently to keep the heat (and, therefore, drift) down and follow it with an appropriate buffer to get the power up to the required level. This approach also maximizes phase noise.
Conversely, if you drive it hard then it becomes increasingly difficult (in my experience, next to impossible) to maintain acceptable frequency stability.
With the DDS approach, phase noise and drift are intrinsically small. The topic is covered shortly.
PIC “N” MIX Summary
Before covering the essential theory these are the features on offer should you adopt my software:
General Summary
- PIC “N” MIX replaces the functions of the crystal oscillator bank, VFO, mixer, bandpass filters, power driver and frequency counter associated with a conventional HF transceiver with significantly enhanced features and lower cost. Not merely a VFO!
- Alternatively, it acts as a programmable and/or tunable signal source with output from audio to 40 MHz in 10 Hz steps.
- All functions are controlled by either a multifunction tuning knob—or by a simple telephone keypad with 65 discrete key combinations recognized by the software.
- A large six-digit seven-segment display with auto-ranging gives a resolution of 10 Hz.
- Two independent VFOs provide IRT, ITT and crossband operation.
- A variety of tuning and scanning modes provides operational flexibility.
- Any desired frequency may be entered directly from the keypad.
- The switch-on frequency and nine band initialization frequencies are user programmable.
- As are 10 frequency memories.
- Any three IF offsets (USB, LSB and CW separately) in the HF range may be entered.
- USB/LSB/CW selection outputs—and band switching outputs to the host transceiver are provided as a hardware option.
- Front panel LEDs provide status information and double as a bar-graph to show tuning rate.
- Finally, there are a number of possible physical layouts providing flexible outboard or integrated configurations.
Administrative Features
- The frequency accuracy is determined by a reference oscillator in the VHF range. You may use any crystal in the range 100 MHz–125 MHz and program the actual frequency into the software yourself.
- Final calibration and any subsequent correction for crystal ageing are achieved using the tuning knob to drive a trimmer in software. A physical trimmer which would inevitably introduce drift and phase noise is neither required nor provided.
- IF offsets may be entered from the keypad and/or trimmed to zero beat with the host transceiver carrier crystals.
- As an injection oscillator, the output frequency is the selected IF frequency plus or minus the desired frequency. The choice of high-side or low-side injection may be made “on the fly” with the sideband selection outputs to the host being switched to correspond.
Operational Features
- Intelligent tuning continuously monitors the speed and duration of tuning knob rotation to vary the tuning rate dynamically. Thus the longer and faster you turn the knob, the greater the tuning increments.
- A software flywheel engages automatically at high tuning speeds for rapid and/or large frequency excursions—and is disengaged by the slightest turn of the knob in the opposite direction.
- As opposed to traditional tuning where rotation of the knob alters frequency, a tuning rate option is provided whereby rotation of the knob alters the rate of frequency change—from zero to very fast.
This is particularly useful for casually scanning around a band without having to continuously turn the knob.
- Guard channel operation provides normal tuning, but with a brief switch to another chosen spot frequency about every 20 seconds.
- Up to ten memories may be programmed with frequency. As opposed to merely providing spot frequencies, they are also jumping off points for further tuning.
- Memory scanning mode cycles between the ten memory frequencies at a speed determined by the tuning knob.
- Spot scanning switches between two chosen spot frequencies at a speed determined by the tuning knob.
- Range scanning tunes up and down between two chosen limits with frequency increments determined by the tuning knob.
AD9850 DDS
Throughout this article, I have used the nomenclature used by Analog Devices in their data sheet and only mentioned the features and configuration of the chip used in this project. There are others.
There is little you need to know about the internal workings of this device. The most significant consideration is that it contains the DAC—necessary to convert the digitally generated sine wave to analogue form—on the chip. So you neither have to worry about specifying a suitable DAC nor interfacing it.
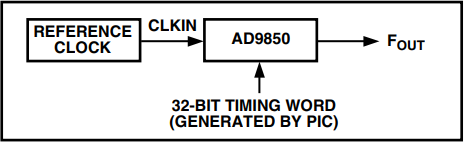
Figure 1. DDS Block Diagram.
The basic block diagram is shown in Figure 1. There is a simple relationship between the output frequency FOUT, the reference clock frequency CLKIN, and the 32-bit tuning word ΔPhase:

Using a 125 MHz clock, the highest frequency permitted, this gives us tuning increments of 0.0291 Hz, orders of magnitude better than needed for this application. In practice this means that using 10 Hz tuning increments an error of 0.0291 Hz is significantly smaller than, for example, any drift on your carrier x’tal.
Stability in a DDS system is the same (in parts per million) as that of the reference clock x’tal oscillator. For example, if the 125 MHz clock drifts by 10 Hz then on 80 m with 12.5 MHz injection, you will drift by 1 Hz. Phase noise on the DDS output is better than that of the reference clock—which contributes most of the system phase noise. The improvement is

Is it that simple? Unfortunately, not quite, for as well as generating the required frequency, aliased or image outputs are also present. This is inherent in any sampled signal and the output observes Nyquist’s theorem. The aliased images are at multiples of the reference clock, CLKIN ± the output frequency FOUT. Thus with a clock frequency of 125 MHz and the wanted output at 20 MHz, the images will be at 105 MHz (first image), 145 MHz (second image), 230 MHz (third image), 270 MHz (fourth image) . . . and so on.
Another consequence of Nyquist’s theorem is that the maximum theoretical output frequency is half the reference clock frequency—but in practice, one third is usually taken as a rule-of-thumb limit—to provide a reasonable separation between the wanted signal and significant images.
The amplitude of the images follows a sine envelope as shown in Figure 2. A low-pass filter is therefore inserted in the output to reduce the image outputs; and on the highest bands using a high IF, the Tx/Rx signal frequency tuned circuits offer further protection. Using the highest possible reference clock frequency obviously helps.
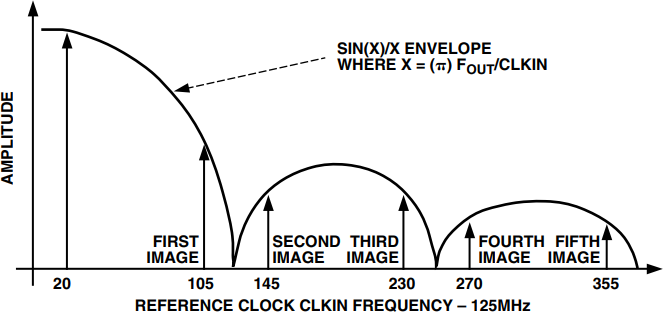
Figure 2. DDS Output Spectrum.
There are other discrete AM spurious outputs as a result of limitations in DAC technology. The significant ones are few in number and appear from the user’s perspective to be at random frequencies. Analog Devices specify them as better than 50 dB down and the practical consequence of these is an occasional birdie.
The remaining AM spurs form a continuous noise floor at about 70 dB down and these give rise to the greatest concern. A typical double balanced mixer will furnish about 40 dB further suppression—so if the mixer is injected at +7 dBm, weak birdies will be heard if the band noise is less than 2 mV at the mixer RF port. On the LF bands with most receivers this will be academic but on, say, 10 m a typical Rx will need to use an RF preamp with some 25 dB net gain to both retain adequate sensitivity and to mask the noise floor. This topic will be much less of an issue when 12-bit DDS is available at affordable prices but meanwhile this 10-bit DDS may not be suitable for all home-brew Rx topologies, particularly if you are reluctant to alter your gain distribution.
The final challenge with the AD9850 is its size, see Figure 3. Designed for surface mounting, it is truly microscopic. Much effort has gone into finding repeatable amateur methods of mounting it which do not compromise performance. Analog Devices recommend a 4-layer board with dedicated power and ground planes.
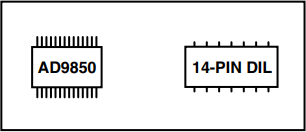
Figure 3. AD9850’s 28-Lead Shrink Small Outline Package as Compared to a 14-Lead DIL Package.
I tried it on double-sided board, both surface mounted and let into a slot so that it sat in the thickness of the PCB. I had no great problems hand-etching the boards—but found substantial difficulty in soldering the chip to the pads. The best I managed was with a medium-sized iron and a length of sharpened copper wire bound to the bit—and very fine solder. The propensity to bridge adjacent leads was enormous. Worst, it seemed impossible to maintain clean power and ground plane layouts— which ultimately prejudices the phase-noise performance.
After obtaining a batch of 50 unmarked devices in the same packaging at a rally and having destroyed many in the quest, I settled on a dead-bug approach with continuous power and ground planes—mounted as a subassembly on a DIL socket and with the input/output leads taken out to the DIL socket on fine wires.
This method is reproducible if you have average eyesight (or a good magnifier) and a short-term steady hand. The process is described in detail in Part 2 of this article.
The World of PICS
The 16C84 is one of a large and growing range of 8-bit microcontrollers. The devices vary according to speed, the amount of memory, built in devices (including A-D converters) and other features. For the latest detail, consult the Arizona Microchip website.
The 16C84 specifically is—in brief—an electrically reprogrammable device with 1 k of program memory (i.e., room for 1024 instructions), 36 bytes of working data and 64 bytes of data EEPROM which survives power down; and 13 input/output pins.
Also on the website you will find the integrated development environment MPLAB which was used exclusively in developing my software. It includes an editor, assembler and simulator. The latter is particularly useful since you can progressively build and test code with your target chip simulated on the PC—no real hardware needed.
If you want to download MPLAB, watch your phone bill because it is about 5 MB when unzipped!
You can run elements of the software under DOS, but I used it exclusively under Windows. At first under Windows 3.1 on a 386 and latterly under Windows ’95 on a 486. Both were entirely satisfactory. C++ compilers are also available, but I haven’t tried any of them, all my work being in assembler.
Of the various programmers available, I built TOPIC by David Tait6 which runs out of the PC parallel port. You can also build ones for serial port operation and some even need no power supply, deriving their power from the port.
Having conducted the intellectual exercise of “designing” some aspect of the software, the mechanics are easy enough. After typing in the code using the editor, you assemble it and then run it on the simulator—if necessary one instruction at a time—looking at intermediate and end results to see if it works. You can also check execution times. When you are happy, you then download the software onto the PIC using the programmer (say, 10 seconds) and run your code in the real world. If you are careful, the PIC can be programmed in situ in the target environment which speeds up the process enormously.
The assembler language itself is easy to learn with only 35 instructions. The art, it turns out, is usually not whether you can write something that works but rather, can you find an efficient enough way of doing it to squeeze it into the space without unduly compromising features, performance and ultimately maintainability? As Eric Morecombe once said “Composing good music is the same as composing bad music. Its just a matter of putting the notes in a different order.” So it is with software!
So, if you have never written any software before and have a PC with at least temporary access to the Internet, you can have a go with no incremental cost. (Or you could buy a suitable secondhand PC for about £50—and most Internet service providers offer a free trial period.)
Think of the range of applications—self-tuning ATUs, intelligent AGC generators, keyers and readers; in fact any application involving control or logic is a potential candidate where one 18-pin DIL coupled with your intellect can replace acres of conventional hardwired logic at trivial cost. Who says computers and amateur radio don’t mix? In my view these microcontrollers are going to dominate many aspects of home-brew construction before long.
The Input/Output Challenge
As just mentioned, the 16C84 has 13 input/output (I/O) pins for controlling its environment. How many are actually needed? The following is the first-pass answer:
| Inputs—total of 15 as follows: | |
| PTT Line Monitoring | 1 |
| Keypad 4 × 3 | 12 |
| Shaft Encoder | 2 |
| Outputs—Total of 74 as follows: | |
| 6 Digits × 7 Segments + Decimal | 48 |
| Status LEDs | 8 |
| Band Switch Outputs | 15 |
| AD9850 Control | 3 |
| Giving a grand total (apparently) of 89. | |
Clearly something has to give and some supplemental hardware is needed. There is, however, one mitigating feature. The 13 I/O pins on the PIC can be used as either inputs or outputs—and you can change them “on the fly” in midprogram so with cunning they can be both!
Firstly, the 12 keypad switches aren’t individually monitored. Each row is tested in turn looking at each column in turn for key presses. This needs only seven I/O lines.
Next, rather than drive each display separately, each one is driven in turn—in rapid succession; i.e., they are multiplexed. Two low-cost decoder chips are added and this gets the I/O count for the display segments down to seven. And of these, three outputs are in fact the same lines as used for the three inputs for the keypad columns; and the other four outputs are also multiplexed to drive the keypad rows.
Then three serial in, parallel out latches are added to handle status and band switching.
These have three unique data lines, a common clock line (with all four again multiplexed with the display)—and a latch line shared with the AD9850.
The final touch is to drive the decimal point output on the same line as the shaft encoder direction input.
If you have kept up with this, then you will agree that the total I/O count is now down to 13! Figure 4 shows what it all looks like—and for good measure two lines are also shared with in situ programming. The only other viable approach would be a multi-PIC solution. It turns out to be marginally more expensive and significantly more intellectually demanding.
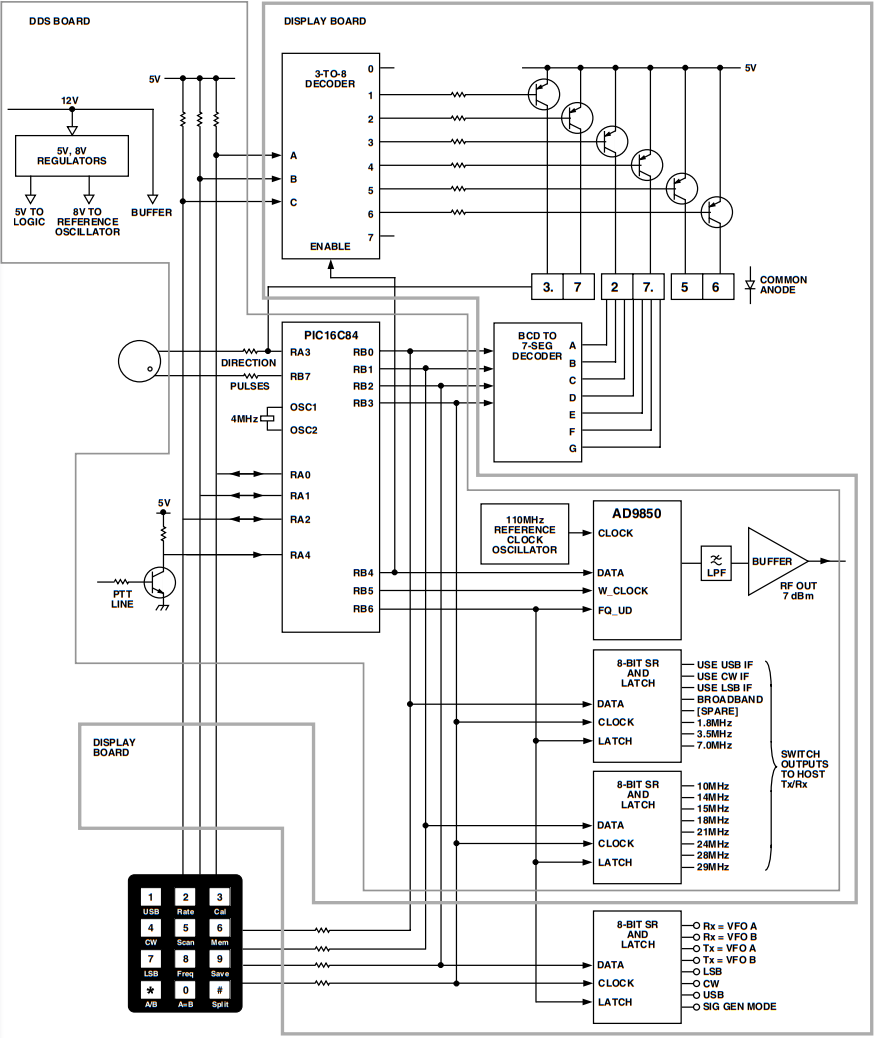
Figure 4. PIC “N” MIX block diagram, illustrating PIC input/output allocations and physical partitioning. Besides power supply distribution and decoupling, all functional elements are shown.
There now remains but one question. Can we multiplex all this multiplexing fast enough in the software so that the user sees “instant” response and smooth “continuous” operation? The answer, it transpires, is that it is not even difficult!
Budgets
Cost—If you were to buy all the electronic components from new, you should allow about £75.
Time—Construction time is obviously very variable, but a good estimate would be one day each to make the PCBs and one and one-half days to assemble them. You will need about two hours to build the DDS subassembly. So this is not a “weekend project,” but it probably won’t exceed two!
If you design your own software, times are impossible to estimate. But you can write some software to do some one useful thing—say, generate a fixed DDS output frequency—very quickly. Its the integration of the whole which takes time.
Power—you need 12 V dc at 400 mA, smoothed but not necessarily regulated. From 10 V–13 V is acceptable.
Part 2 of 5
In this issue the alternatives and techniques for mechanical construction are explored. These include a process for making one-off PCBs—and for mounting the DDS chip on a DIL socket carrier.
Overall Strategy
When it comes to the gross layout of the hardware, flexibility is a design objective. When it comes to the mounting of the DDS chip itself, a successful outcome is likely only if you absolutely follow the rules and allow me to adopt a somewhat dictatorial style.
Your first decision revolves around whether you are building an external injection source or are integrating it mechanically with your Tx/Rx.
In either case, self-evidently, the tuning knob and keypad need to go on the front panel with the display board immediately behind it.
The DDS board is the same size as the display board. It is designed for mounting parallel to and behind the display board, or at right-angles to it, or completely remotely from it and connected to it by ribbon cable. The last choice is not relevant in a self-contained external source.
The tuning knob may be mounted on either side of the display, the choice being governed simply by whether you are right or left-handed. The keypad should be mounted on the same side of the display as the tuning knob. Should you mount it on the opposite side of the display, although it may give some appearance of better aesthetic balance, you are courting an ergonomic disaster. Visual feedback of your key presses is given via the display and status LEDs and your forearm will inevitably obscure the view.
In the photographs, you will note that my keypad is mounted contrary to these recommendations. This is a layout peculiar to my requirements since I am unusual in being mostly ambidextrous, preferring twisting motions (e.g., screw drivers) with my right hand and pushing motions (e.g., sawing) with my left hand. In practice, I, therefore, use both hands, but most people would find this uncomfortable.
The second decision is whether to build the shaft encoder as an integral part of and mounted on the DDS and display boards—or to split them. The choice is yours and is governed mostly by where you are starting from. A 12" separation between the two presents no performance issues. If you want to take this approach, simply cut both boards, separate them and reconnect them using four flying leads or some ribbon cable. The four leads are +5 V, 0 V, pulses and direction. Obviously you could build them like this in the first place.
The final consideration is the housing for a stand-alone unit. Those of us who have built so far have found no need for a screened enclosure but it would obviously represent good practice. In any event, you will need to consider weighting or securing the box since Newton’s Second Law applies when you press the keys—and the last thing you want is the box skidding around.
Display Board Mounting
The display board mounts immediately behind the front panel. You will need an aperture of 3" × 3/4" to view the frequency readout. Having cut the aperture, you need to back the hole with some optical filter material which either corresponds to the color of your display (typically red/green) or—and preferably—is circularly polarized. The latter gives much superior performance in bright natural light but for some reason has become expensive in recent years.
Figure 5 is a suggested front panel template which also shows how I have accommodated the status LEDs. Three mm holes are drilled for these, the LEDs are inserted in the board but not soldered. The front panel is mounted into position, and the LEDs are adjusted in their holes for equal protrusion. They are then tacked and finally soldered to the display board when fully aligned.
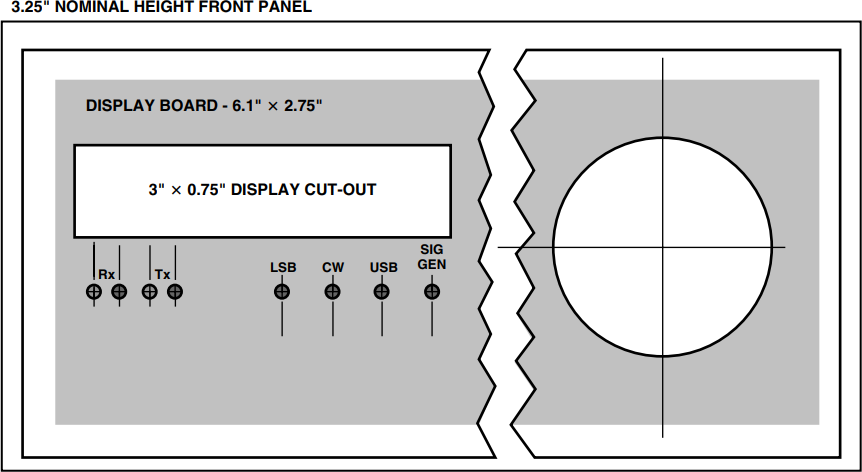
Figure 5. Drilling template for front panel. The position of the tuning knob shown assumes you are mounting the shaft encoder on the display and DDS boards. It could be much further to the right or on the opposite side of the display.
If like me, you deprecate the idea of screw-heads showing on the front panel, then you will need to glue some nuts or threaded pillars to the back of the front panel to mount the display board. I find nut rivets ideal for this since they have a large surface area which makes for strong and permanent adhesion using super glue.
DDS Board Mounting
Figure 6 shows the configuration for right angle mounting and Figure 7 illustrates parallel mounting.
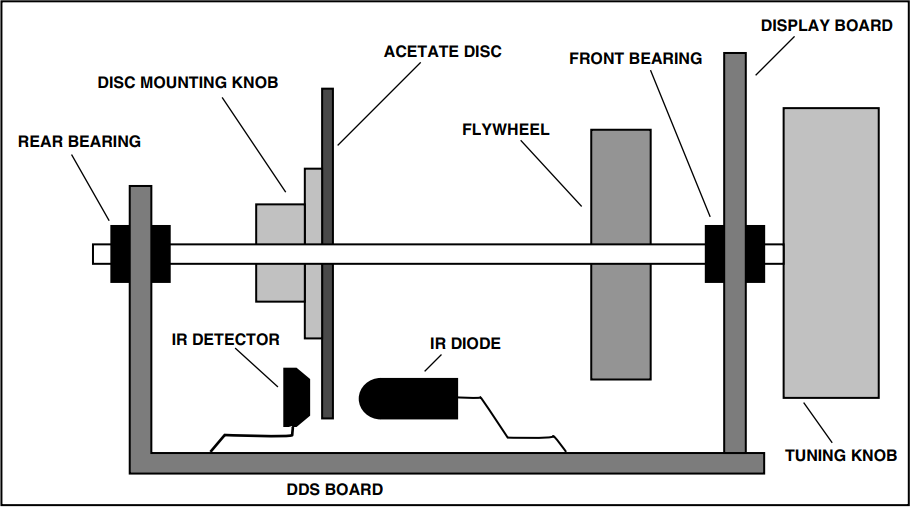
Figure 6. DDS board mounted at right angles to and integral with the display board. Also illustrates a suggested mounting method (not to scale) for the shaft encoder disc, IR diode and detector. Note the long lead lengths on the latter to give simplea djustment of diode and detector positions relative to the disc. The disc needs to be mounted near enough to the display board to clear the x’tal oscillator enclosure to be described later. The rear bearing is mounted on a piece of PCB soldered to the DDS board and/or the rear of the x’tal oscillator enclosure.
Figure 6. DDS board mounted at right angles to and integral with the display board. Also illustrates a suggested mounting method (not to scale) for the shaft encoder disc, IR diode and detector. Note the long lead lengths on the latter to give simplea djustment of diode and detector positions relative to the disc. The disc needs to be mounted near enough to the display board to clear the x’tal oscillator enclosure to be described later. The rear bearing is mounted on a piece of PCB soldered to the DDS board and/or the rear of the x’tal oscillator enclosure.
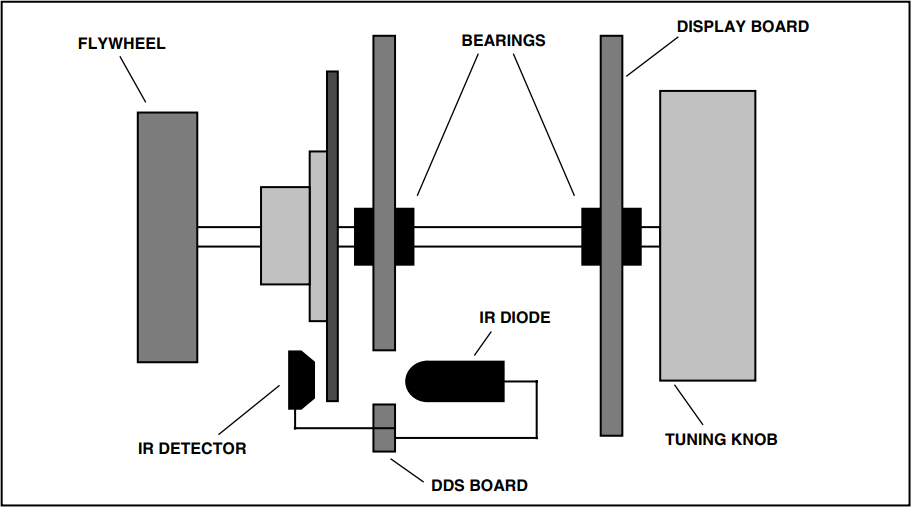
Figure 7. Alternative mounting method (not-to-scale) where the DDS board is mounted parallel to the display board on spacers (not shown). A small hole is drilled in the DDS board to pass the infrared, and the rear bearings are fitted to the DDS board. The leads for the detector pass through the board to the tracks—which are cut to avoid interference with the rear bearing. The detail will become apparent when the DDS PCB is described later.
To ensure full access during commissioning I would strongly recommend that you avoid the parallel mounting configuration to start with. If this is your target configuration, join the two boards with a short length of 0.1" pitch ribbon cable. This allows access to both sides of both boards for testing.
If you are mounting the two boards at right angles in close proximity, then the best approach is to permanently solder the two boards together as shown in Figure 6. Butt the two boards to form a small “T” junction (not an “L”), tack them lightly together, check the angle and then run beads of solder along the full length of both sides to intimately join the ground planes. Join the edge-connectors with a small solder bridge and test for shorts.
A further advantage of taking this approach is that the display board need not be secured to the front panel. Mounting the DDS board to a horizontal base with the display ICs touching the rear of the optical filter provides effective location.
Making the PCBs
In my article on the Third Method Transceiver, I described an approach to constructing boards without etching which proved very popular. It would be perfectly viable to use this technique for the display board in this project, but wholly inappropriate for the DDS board. So what follows is a technique I have used for many years for making one-off PCBs without the expense of UV exposure techniques. I must emphasize that this approach is viable only for one-offs and is hopeless if you need greater quantities. I would also be very surprised if these particular boards can be made using an etch-resist pen, since some of the tracking is very fine.
The technique revolves around removal of material where you want to remove copper—rather than applying resist where you want to retain copper.
The board is firstly cut to size and then drilled. For any surface mounting areas, the board may be gently punched but not drilled. The idea is to give yourself guides to draw the artwork directly onto the board.
With the board clean but not polished, it is sprayed both sides with an aerosol of car paint. Matt black is best for a contrast color against the copper. It is important to put on a light enough coat to just cover it, but not to get any substantial build up of paint thickness.
Then, only after the paint is truly dry, the paint is removed between the tracks using a scribing tool. You use the holes, punch marks and master artwork as a guide. You only need to remove a fine line of paint. In fact if you stand a few feet back from the finished board, it looks substantially like continuous copper. Note that if, for example, you have two parallel tracks, you would need three scribed lines to implement it.
The technique takes a little getting used to, but if you should make a mistake, simply repaint the affected area with a small brush and do it again—differently!
There are some important tips:
Tape the board down to a reasonable block of wood to stop it skidding around and to prevent scratching the paint on the reverse side. You can also use a square against the edge of the wood if you want posh lines—but the square needs to be transparent if you want to avoid frustration. Use a piece of Vero board as a guide if you need to scribe edge connectors. Scribe the board at a good room temperature—certainly never cold. The heat from a desk light makes it even easier and helps prevent paint chipping.
Finally, the scribing tool itself is important. It needs to be pointed but not incredibly so. And it also wants to retain the point. I find the best tool is to take a masonry nail—which is hard steel—cut the head off and grip it in a draughtsman’s clutch-pencil. Failing that, a long masonry nail through a cork is pretty comfortable.
Sharpen the point with a rotate and drag motion on a piece of emery and when you have got it as sharp as you can, blunt it ever so slightly on a piece of fine wet and dry. Try it on a piece of scrap, holding the scribe at about 45°, and you should get a clean fine line. Resist gouging out the copper. You are only trying to remove paint! Repeat the sharpening process every ten minutes or so. You will feel when it is not cutting the paint cleanly. By the way, for really fine work (you won’t need it here) a sewing needle is excellent as is an old gramophone needle.
When you have scribed both sides of the board and checked it meticulously, etch the board in the conventional manner with ferric chloride. You will find you will get through very little FeCl because the total amount of copper removed is very small. Observe all the usual safety precautions. Keep the board and FeCl solution gently on the move all the time to get an even etch and have the courage to overetch it slightly if anything. Make sure both sides are fully etched before removal.
Wash the board thoroughly in cold water, inspect and etch further if necessary. Finally wash the board with hot water and then clean off all the paint using cellulose thinners. A small paint brush helps to get the paint out of the holes, but being a good insulator, this is not critical. Polish the board with fine wet and dry (used wet) or a polishing block.
Now for the important stage. Using a continuity tester check for isolation between each and every adjacent track. If you find any shorts that are obvious, clear then with a sharp blade. If they are not obvious, my practice which I hesitate to publicize is to connect two test probes to a car battery and then blow off the short. Be careful!
The end result is an individual piece of craftsmanship—produced with no greater effort or time than is needed to draw the artwork onto film in the first place. And it is home-brew! You end up with much more ground plane than is typical with other approaches—which can only be to the good. And there are no critical processes in the sense that you can see what is happening all the time and can avoid moving on until you have got it right. I commend it to you.
Procedure for Fitting the AD9850 Chip to a DIL Carrier
Caution: Analog Devices recommend taking proper antistatic precautions when handling the AD9850. It would be folly to ignore this advice with a chip of this value.
Take a 28-pin, 0.6" wide turned-pin DIL socket and fit a piece of PCB, copper side up into the recess between the pins. It needs to be a snug fit. Most sockets have small moulding pimples adjacent to Pins 1 and 14. These should be removed with a sharp knife to allow the PCB to lie flat.
When the PCB is the correct size for fitting, clean the copper surface and handle it only by the edges thereafter.
Secure the PCB to the socket by soldering some tinned copper wires between Pins 1 and 28—and Pins 14 and 15. Solder the wire to the PCB also. This secures the PCB in place on the socket and establishes an earth connection point on each corner.
Take the socket and secure it to something heavy enough to allow you to work on it without it sliding around. I use a small block of wood with some antistatic foam stuck to it—and press the legs of the socket into the foam to secure it.
Take the AD9850 chip, turn it over and mark Pin 1 on the underside with a dab of paint or similar. This ensures that even when the chip is upside down, you are still sure which is Pin 1, thus preventing you from connecting it up rotated by 180°.
Place the chip centrally on the PCB at right angles to the socket between Pins 7, 8, 21, and 22. Mark the position of the chip moulding under its pins—on the PCB, using a sharp pencil. Remove the chip.
Tin the PCB evenly in two strips about 4 mm wide under where the chip pins will be—up to but not under the marked moulding position. This is to facilitate soldering the earthy pins of the chip later.
Secure the chip upside down with a trace of super glue to the PCB. Make absolutely certain that Pin 1 on the chip is in the same corner as Pin 1 on the socket. Check it again!
Please follow the rest of this process without creativity. The result is illustrated in Figure 8. I have hand mounted about 10 chips to optimize the process and carefully observed others deviate (on practice chips!) and get it wrong. The source of error is always operating on the wrong pin. Although this may seem surprising, when you have tried it yourself you will understand why.
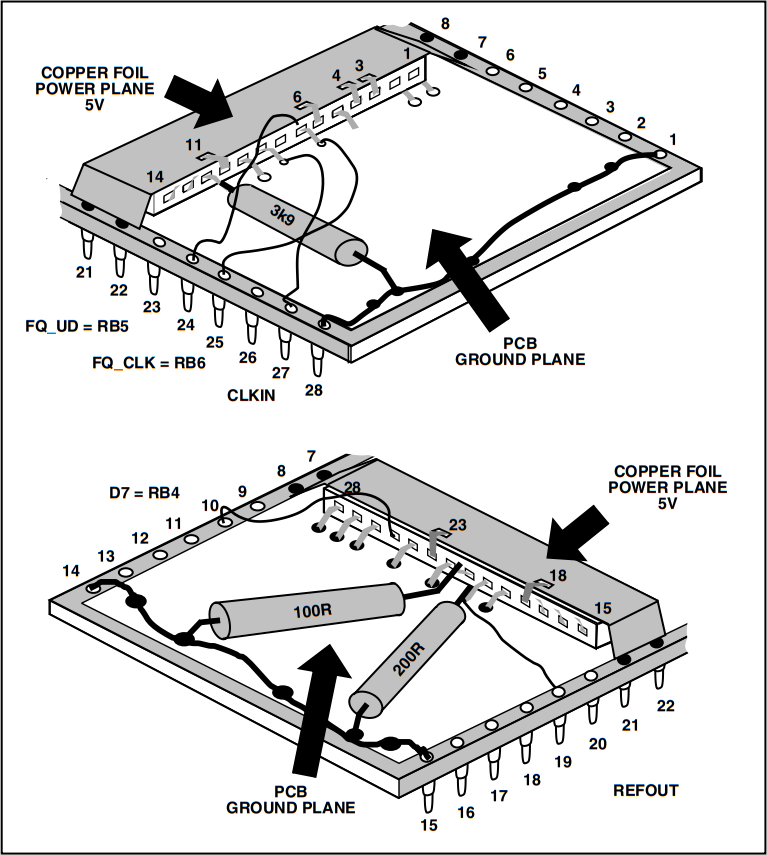
Figure 8. DDS assembly. The DDS chip is mounted upside down (dead-bug) on the PCB ground plane. A strip of copper foil provides a low impedance power plane. Not shown is a 1n decoupling capacitor connected between the ground and power planes adjacent to Pin 1 on the chip.
From now on, work only in full natural daylight. The idea is to work down one side of the chip, never taking your eyes off the job. Should you do so and have to start recounting the pins, this has proved to be the single largest source of errors.
You only get one chance to get it right so you must get some help to dictate the following sequence to you—so you can stay focused on the job.
The best tool for bending pins is a Stanley knife blade. Push on the end of the pin with the point of the blade in the required direction. Not far at this stage; just enough to be sure of the intended direction later.
In this sequence, “down” means bend the pin towards the PCB. “Up” means bend it away from the board, approximately vertically upwards. “Leave” means do nothing.
- down
- down
- up
- up
- down
- up
- leave
- leave
- leave
- down
- up
- leave
- leave
- leave
Now focus on infinity and walk around for several minutes before addressing the other side.
- leave
- leave
- leave
- up
- down
- leave
- leave
- down
- up
- down
- leave
- down
- down
- down
That completes the tricky bit!
Bend down Pins 1 and 2 to within about 1 mm of the tinned surface and then solder them to the PCB.
To solder the pins to the copper, the best technique is to place the iron on the board about 2 mm back from the pin(s) and hold it there for a couple of seconds to heat the mass of the PCB. Then form a small blob of solder on the PCB and push it towards the pins. On contact, remove the iron almost immediately.
Repeat this process for Pins 19, 26–28, 10, 22, 5, and 24 in that order. Make very sure you are operating on the correct legs. You can bend them up and down perhaps once before risking amputation but it is not worth the risk.
Obtain a small strip of copper foil. Copper or brass shim stock would suffice. In the worst case, a suitable strip can be removed from a piece of scrap PCB with a sharp knife or stripped from some foil braided coax.
It needs to be long enough to solder to Pins 7 and 8 of the socket, pass over the chip and down the other side to solder to Pins 21 and 22. The width needs to be the same as (or if anything, a whisker more than) the chip moulding width. It can be trimmed to size and trial fitted for width with a pair of scissors. Excess length can be removed later.
Fix the foil to the chip moulding using a trace of super glue. When set, bend the ends down, trim to length and solder to the +5 V pins on the DIL socket (7 and 8, 21 and 22), making sure that it does not touch the PCB ground plane.
Bend up completely all the +5 V pins on the chip, namely 3, 4, 6, 11, 18, 23 and then quickly solder each one to the foil.
There now remains only to attach seven signal pins and to ease the process, some pins are bent down a little to near horizontal and some up a few degrees. This gives more clearance to get the soldering iron in. Bend Pins 8, 21, 25 up a little and Pins 7, 9, 12, 20 down a little.
Trim the three resistors to size and solder down their earthy ends with the pin end just touching the end of the target pin, bending the resistors leads as necessary to get a touch on the end of the pins. Quickly solder the resistors to the pins.
Take some enamelled copper wire, very thin but not critically so. Vero wire is ideal. Make off the end of the wire on the DIL socket end first and then trim the wire to length. With the end of the wire and the end of the pin both pretinned, and a clean tinned iron, solder the wire to the pin (and in one case, to the resistor lead). The best order is 7, 9, 25, 20, and 8.
Pins 13–17 are not connected.
Part 3 of 5
In this issue the circuit diagram and PCB layout for the display board is described together with some construction notes and the complete project components list.
Display Board Description
Referring to Figure 11, the display element itself comprises three double-digit seven-segment common anode displays. They were chosen because they are large and make for comfortable viewing. Their segments are all wired in parallel.
It is traditional to drive 16 character backlit LCD displays in this sort of application. The cost would be comparable (for a one-off), power consumption noticeably less and the software complexity about the same, albeit totally different in nature. I preferred the LED approach since I find the LCD character size just a little small for comfortable viewing.
The display digits are multiplexed; that is, only one digit is lit at any one time, and all are lit in turn (rapidly and frequently) to provide flicker-free viewing. The software controls the multiplexing process and devotes as much time to repainting the display as circumstances permit.
In operation, IC12 decodes RA0, 1, 2 to determine which one digit is being addressed—driving one of the PNP switches Tr5–Tr10 to handle the digit current. At the same time, IC11 decodes a BCD input on RB0, 1, 2, 3 to determine which segments to light; and in addition RA3 is pulled low for a decimal point. By rushing round each digit in turn and by executing the entire sequence often enough, the human eye sees a continuous sixdigit display.
Do not be tempted to substitute a different BCD to seven-segment decoder chip, since the software relies on the behavior of the ‘LS47 for BCD values greater than nine to achieve leading zero suppression.
Data is clocked into the latch IC13 as an 8-bit serial word —and the outputs are updated by a latch pulse on RB5. These bits drive low current (2 mA) LEDs (D4-D11) directly via current limiting resistors R41–R48. D4 and D5 are green LEDs, the others red. This gives a strong visual clue when you are operating “split.”
The seven lines to the keypad are routed through the display board for convenience. They could equally be taken directly from the DDS board provided some means is found to mount the series resistors R49–R55. The resistors are there to prevent potential short-circuiting of the PIC I/O lines in the event that two or more keys are pressed simultaneously.
Keypad
The keypad is a low cost four-row by three-column switch matrix designed for push-button phones. The software polls the keypad periodically looking for key presses. It does this by driving each row low in turn. For each row, it then tests each column looking for a low and if one is found, the column/row intersection defines which key is pressed. The key press is de-bounced in software since the contacts rapidly make and break for up to 5 ms—and without this facility, the average key press would otherwise be interpreted as about 20 successive identical key presses.
The keypad needs an overlay to give a better feel of the alternative meaning of the keys in this application. Figure 9 may be copied at size and glued over the keys, the digits having been first cut out with a sharp knife.
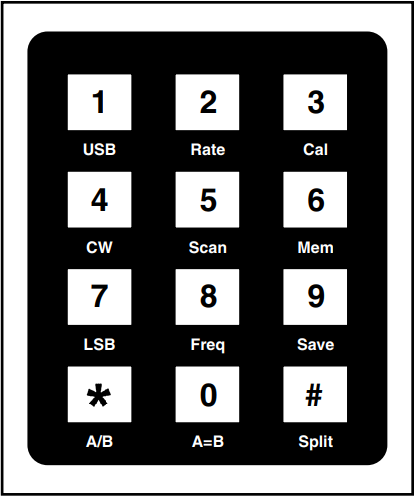
Figure 9. Keypad Overlay for Reproduction, 47 mm Wide by 57.5 mm High.
The keypad is connected to the display board via some seven-way ribbon cable. You need a cable routing which brings the top lead from the display board to the most right-hand connector on the keypad.
Figure 10 shows the best way to achieve this. The cable is routed across the front of the display board beneath the frequency display and LEDs. It then passes behind the keypad and somewhat beyond it. The cable is then folded back on itself—i.e., through 180°—and then folded downwards through 90°. It is then made off onto the seven right-most pads on the keypad. This process produces a neat cable run with the correct connections.
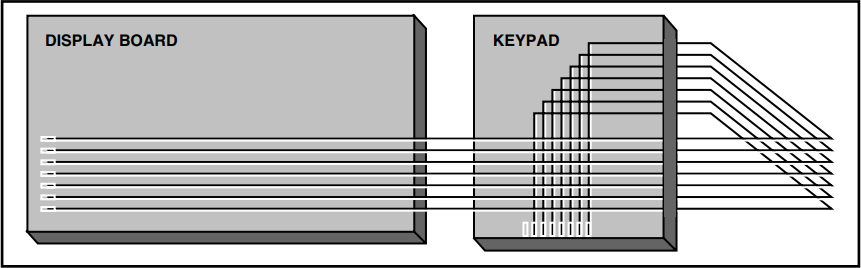
Figure 10. Display board to keypad ribbon cable routing viewed from the front. Note that of the eight connectors on the keypad, the extreme left one is not connected.

Figure 11. Display board circuit diagram. Note that the segments of all the display ICS (8, 9, 10) are wired in parallel except for some decimal points which are never used and which are not connected. The eight 3 mm status LEDs, D4–D11 are soldered on the display board, but physically mounted in holes in the front panel.
Display Board Construction Notes
The PCB layout is shown in Figure 12. The rear tracking is somewhat complex around the display IC sockets. A perfectly acceptable but less purist approach would be to bring these pins and those of IC11 out onto small pads and then hand wire all the segments to the seven-segment decoder using Vero wire.
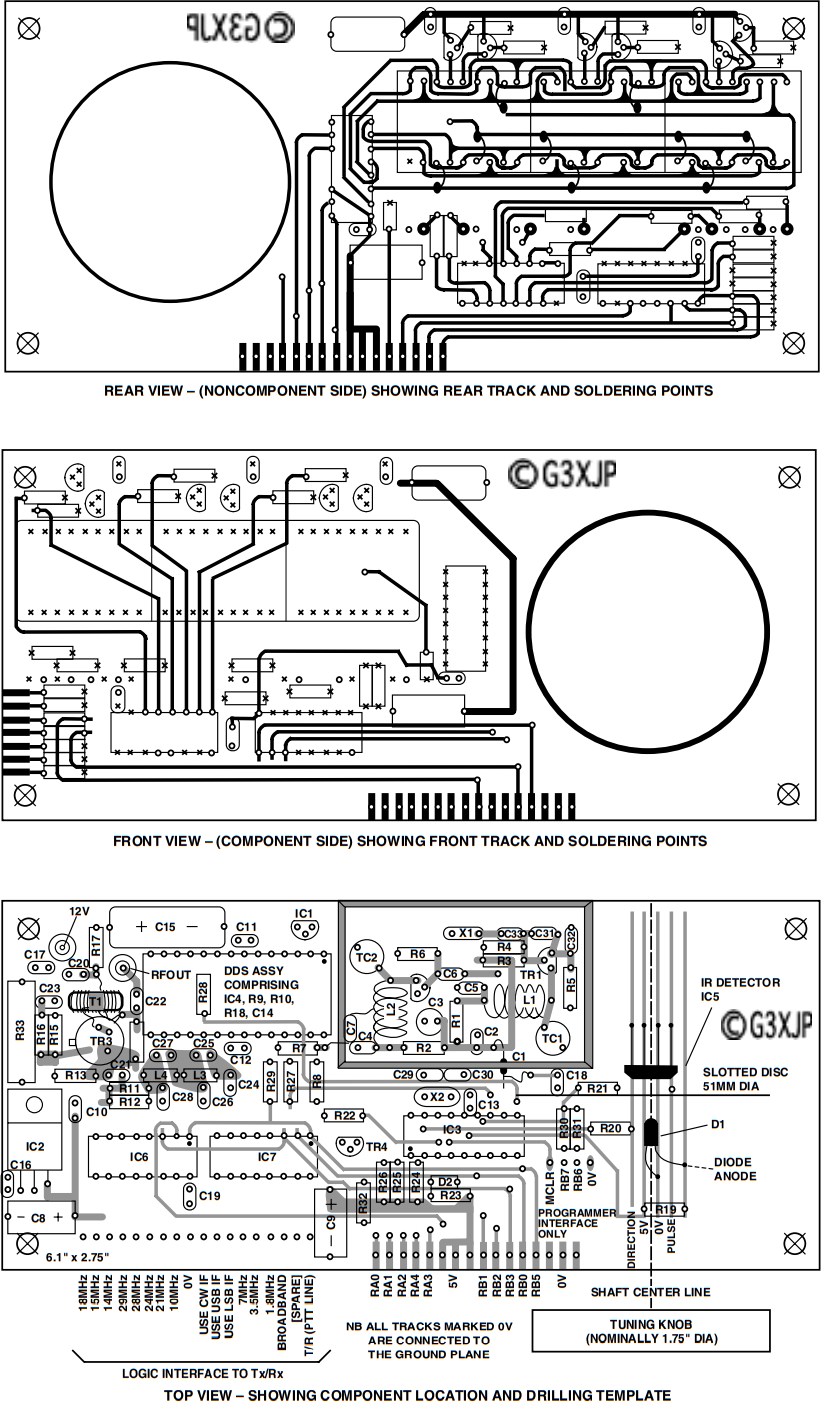
Figure 12. Display board PCB drawn for production as described in the text. The ground plane is not shown since all of the board (both sides) is ground plane copper except where removed to let in the tracking. Holes on the front and rear track views shown as an “x” are not soldered on that side of the board. They should be lightly countersunk. Holes shown as an “o“ ares oldered to either the track or the ground plane. All holes are 0.7 mm dia. The front panel LEDs (D4–D11) are not shown. They solder to the pad and ground plane pairs in a horizontal line about half way up the rear view. Nine short wire links are shown as pecked lines on the rear view.
Other common anode devices, including single-digit ICs and those with pins on the vertical edges could easily be substituted with simple changes to the PCB—or again, by using Vero wire.
The status LEDs may be tacked onto the board but without shortening their leads for commissioning purposes.
When inserting ICs or IC sockets onto the board with this form of PCB construction, insert them only far enough to give a useful tail on the back of the board. Specifically, avoid bridging tracks or earthling pins on the component side of the board via the shoulders on the pins.
| Resistors | 1/8–1/4 W, 5%–10% except R33 |
| R1, R9, R17, R27–31 | 100R |
| R2 | 330R |
| R3, R4 | 10k |
| R5, R14, R20, R21, R23 | 1k |
| R6 | 220R |
| R7, R8, R22 | 4 k 7 |
| R10 | 200R |
| R11 | 180R |
| R12, R15 | 56R |
| R13, R49–55 | 470R |
| R16 | 5 R 6 |
| R18 | 3 k 9 |
| R19 | 560R |
| R24–26 | 270k |
| R32 | 47k |
| R33 | 10R, 2W |
| R35–40 | 2 k 2 |
| R41–48 | 3k3 |
| Capacitors | |
| TC1, TC2 | 2–22p min film dielectric trimmer |
| C1 | 1n feedthrough |
| C2, C4, C5, C11–14, C17, C18 | 1n disc ceramic |
| C3 | 10 μ, 16 V radial electrolytic |
| C6, C24, C28 | 22p ceramic plate |
| C7 | 68p ceramic plate |
| C8, C9, C40, C41 | 100 μ, 10v axial electrolytic |
| C10, C16, C19-23, C34–39 | 10n disc ceramic |
| C15 | 470 μ, 16 V axial electrolytic |
| C25 | 3p3 ceramic plate |
| C26 | 33p ceramic plate |
| C27 | 8p2 ceramic plate |
| C29, C30 | 15p ceramic plate |
| C31, C32 | 47p ceramic plate |
| C33 | 100p ceramic plate |
| Semiconductors | |
| D1 | LD271 IR diode |
| D2, D3 | 1N4148 |
| D4, D5 | 3 mm low current LED (green) |
| D6–D11 | 3 mm low current LED (red) |
| IC1 | 78L08 |
| IC2 | 7805 |
| IC3 | 16C84-04/P (in socket) |
| IC4 | AD9850BRS |
| IC5 | HLC2705 |
| IC6, IC7, IC13 | 4094 (no sockets) |
| IC8–IC10 | 2-digit common anode 7-seg LED, Maplin FA01B (green) or BY66W (red) |
| IC11 | 74LS47 (socket optional) |
| IC12 | 74LS138 (no socket) |
| Tr1 | 2N2222A |
| Tr2 | J310 |
| Tr3 | 2N3866 with small heat sink |
| Tr4 | BC108 |
| Tr5-10 | BC327 |
| Inductors | |
| L1 | 5 turns 22 swg on 1/4" dia, 1/2" long, tap 1 turn from earthy end |
| L2 | 5 turns 22swg on 1/4" dia, 1/2" long, centretap |
| L3 | 1 μH axial choke |
| L4 | 0.68 μH axial choke |
| T1 | 8 bifilar turns 32 swg on FT37-43 |
| Miscellaneous | |
| 2-sided PCB | for dimensions see text |
| Keypad 4x3 | Maplin JM09K 7-way 0.1" pitch ribbon cable for above |
| 1-off | 32-pin DIL turned pin socket (0.6") |
| 1-off | 28-pin DIL turned pin socket (0.6") Mount display ICs on above and cut off unused pins Display optical filter, 3.5"x1" approx. |
| 1-off | 28-pin DIL turned pin socket (0.6") for DDS assy |
| 1-off | 28-pin DIL turned pin socket (0.6") to mount DDS assy on mother board |
| 1-off | 18-pin DIL turned pin socket (0.3") for 16C84 |
| 1-off | 14- pin DIL turned pin socket (0.3") for 74LS47 (optional) |
| Shaft encoder disc | see text |
| Knob to mount encoder disc, approx 1" skirt dia, drill right Tuning knob, flywheel, shaft and bushes/bearings | (optional) |
| 18-way ribbon cable to Tx/Rx | (optional) |
| 16-way inter-board ribbon cable | (optional) |
| 12 V dc input connector | (optional) |
| RF output connector | (optional) |
| 18-way host connector | (optional) |
| X1 | approx 110 MHz (see text) |
| X2 | 4 MHz |
Suppliers
The majority of the above components were purchased from JAB Electronic Components, PO Box 5774, Great Barr, Birmingham, B44 8PJ. Tel 0121 6827045. They offer an excellent service.
The significant exceptions are the keypad, IC8–IC10, D1, D4, D5, D6–D11, Tr1 which are available from Maplins.
The PIC 16C84 (IC3) can also be obtained from Maplin at a 1—off price of £8.90—if you want to write your own software. I will be happy to supply the PIC ready programmed with the features described in this article, an acetate disc for the shaft encoder and a paper overlay for the keypad for £15, on receipt of an SAE.
For bushes and bearings, much can be recovered from scrap potentiometers or variable capacitors. Failing that, model shops are a good source.
The AD9850BRS DDS chip can be purchased through any Analog Devices distributor who will sell small quantities. There may be a long lead time. The price will depend on delivery and payment methods. I used Kudos Thame Ltd., 55 Suttons Business Park, Reading, Berks RG6 1AZ. Tel 0118 935 1010.
Part 4 of 5
In this issue the circuit diagram and PCB layout is provided for the DDS board together with some construction notes and details for building a shaft encoder.
DDS Board Description
Referring to Figure 13, the functional blocks comprise an x’tal oscillator (the reference clock) feeding the DDS assembly, followed by a low-pass filter and buffer. There are two output latches and not least, the PIC which controls operations.
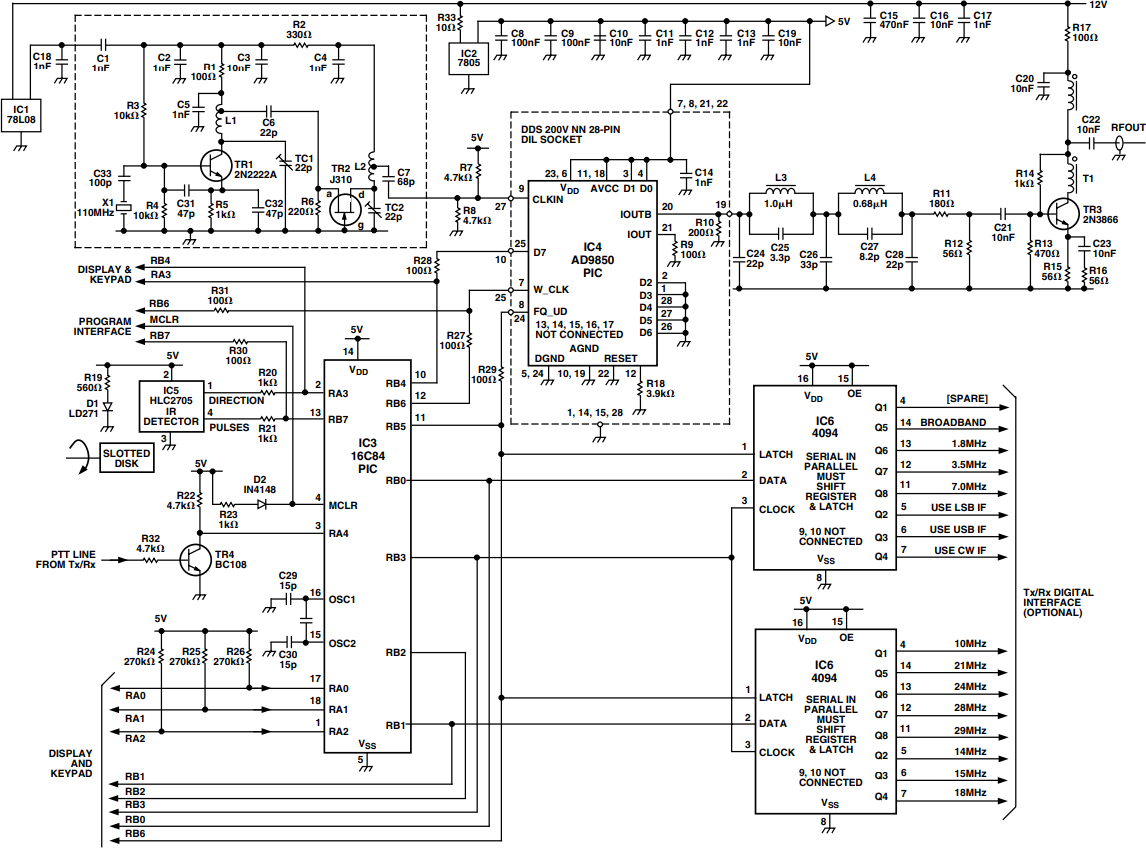
Figure 13. DDS board circuit diagram. IC4 and its associated components are mounted on a 28-pin DIL socket to form the DDS assembly. This plugs into a 28-pin socket on the main board.
On the input side, the PIC is monitoring the shaft encoder, the PTT line and the keypad. Tr1 is a conventional x’tal oscillator followed by Tr2, a common gate buffer. The crystal may be any value in the range 100 MHz–125 MHz, the higher the better. The exact achieved frequency is trimmed into the software using the calibration process described next month.
The entire oscillator is surrounded by a PCB enclosure formed by the board, four sides and a top. The latter has braid hinges for access—and two holes drilled to allow adjustment of TC1 and TC2. R7 and R8 bias the AD9850 reference clock input to half rail.
IC4, the AD9850, is operated in serial control mode. That is, a pulse stream of 32-data bits and eight control bits is clocked serially in on the D7 line by 40 corresponding clock pulses on W_CLK. That sequence is then actioned by pulsing FQ_UD high.
The resulting synthesized sine wave appears on the complimentary current outputs IOUT and IOUTB, terminated by R9 and R10. R18 sets the on-chip DAC full-scale output current in accordance with the manufacturer’s recommendations.
C24–28 and L3, L4 form a 42 MHz, 200 Ω elliptic low-pass filter taken from the AD9850 data sheet. R11, R12 form an “L” pad to terminate the filter and to match into the base of the driver Tr3. This in turn delivers +7 dBm into 50 Ω. It is important that PIC “N” MIX feeds a nonreactive load of about 50 Ω to ensure effective termination of the LPF. The injection port of, say, an SBL-1 mixer is ideal. Being double balanced it also reduces the AM noise floor.
Data is clocked into the latches IC6 and IC7 serially by a sequence of eight clock pulses followed by a latch pulse. Pulses for other purposes appear on the data and clock lines but are effectively ignored since there is no following latch pulse.
These two latches as well as IC13 on the display board and the AD9850 are updated simultaneously by pulsing RB5 high which is reserved exclusively for this purpose.
The latch outputs are +5 V when true, so you may interface these with transistor switches etc. to drive the band switches in your Tx/Rx, switch antennas etc.
The “broad band” output goes true if the displayed frequency is not one of the explicitly specified ones. (To be precise, the 10 MHz and 1 MHz digits are compared). I use this to switch in two relays which short-circuit my Rx front-end and remove all selectivity. This allows me to listen on any HF frequency. Obviously Rx performance is seriously compromised under these circumstances, but for the ability to listen to broadcast stations, frequency standards etc., the price is well worth paying. Equally, if your Rx does not have a front-end for an explicit band you could diode-OR the bit for that band with the broad band bit.
IC3, the PIC has been covered previously. Its hardware configuration is entirely conventional. The three lines shown as “Programmer interface” together with R30 and R31 may be omitted if you never have any intention of programming the PIC in situ.
D1 is a cheap IR emitter designed for remote control applications. IC6, the IR detector is designed for computer mouse position encoding. It has the merit of producing decoded outputs which are very easy (and fast) to handle in software. The “pulses” output goes briefly low for every dark/light transition. This is used to interrupt the PIC to handle the consequences. The “direction” output is a steady level which reflects the last direction of rotation. The software can, therefore, test this line at any time pretty well at leisure to determine tuning direction. This is far cheaper on program size than decoding the gray code outputs produced by many commercial shaft encoders.
Tr4 isolates the host transceiver PTT line. The logic on the PTT line can be of either polarity since the software assumes the initial level at switch-on corresponds to receive. This allows for your not connecting a PTT line if you are running an Rx only. But if running a Tx/Rx this line must be connected since the software needs to know the T/R state in order to allow split operation; and for safety reasons, to cancel any scanning operations when appropriate.
Construction Notes
There is a preferred order for building and commissioning the DDS board to ensure access and progressive testing. The PCB layout is shown in Figure 14.

Figure 14. DDS board PCB drawn for production using same conventions as Figure 12. All holes are 0.7 mm dia except three leads from IC2 which are 1 mm. Ref oscillator is screened by PCB enclosure. C7 uses its leads to connect from tap on L2, via hold in enclosure to top track. C1 is connected to track via short jumpers. IR detector/diode and disc shown for mounting at 90 degrees to display to top track. C1 is connected to track via short jumpers. IR detector/diode and disc shown for mounting at 90 degrees to display board.
Build the 110 MHz crystal oscillator first. That is, all the components within the screening enclosure (but not the enclosure itself) and omitting for now C1 and C7.
The oscillator components are all surface mounted on islands on the top copper plane. The leads must be cut as short as practicable, consistent with being able to get the iron in. Mount the two coils L1 and L2 last. Fit the tap to L1.
Fit also C15, IC1 and C18 and insert a temporary jumper from the 8 V top track to the junction of R1 and C2 to provide power to the oscillator.
Loosely couple a GDO (as a passive detector) to L2 and set the GDO to your crystal frequency. Adjust TC1 for oscillation and peak TC2 for maximum output at the specified frequency. Repeat several times and check that the oscillator fires up from cold.
Next fit the interplane wire links (i.e., some old component leads) which are either under the PIC socket or between it and the edge connector.
Fit IC2 and solder its tab to the board. Fit C8-C10, R23 and R33. This completes the +5 V rail distribution. Check for shorts, apply 12 V and verify +5 V is available on the top track busbar under the shaft encoder detector—second track from the left. If it is getting this far, all the several crosses from top to bottom track are verified.
Fit, in order, C29, C30, Tr4, R22, R32, R26, R25, D2.
Check again the links under the PIC socket (IC3), your last chance, and fit the socket. Now fit R24, C13 and X2.
Now surface mount all the components in the low-pass filter and buffer amplifier. Fit the transistor Tr3 last and its heat sink last of all.
Temporarily fit C7, one end to the top track shown, the other forming the centre tap on L2.
Solder IC5 and D1 to the board without shortening their leads and adjust them so that they are about 1 cm apart. Fit the socket ready for the DDS Assembly but do not insert the assembly itself at this stage. Mount all other components except C1. Insert IC3 in its socket.
Build the display board and link it to the DDS board. Check all the interboard leads for any shorts to earth and for any shorts to any and every other such lead.
Apply 12 V and your display should initialize to 80 m and the Rx = “A,”’ Tx = “A” and LSB LEDs should light. This all verifies that the PIC is working—as well as the Display board. At this stage there is, of course, no actual RF output.
A screwdriver passed between IC5 and D1 from left to right should produce a decrease in indicated frequency—and vice versa right to left.
Wire up the keypad and check that all keys work—as well as the status LEDs.
Verify +5 V on the DDS Assembly socket and check for any shorts or bridges on all connected pins.
Finally, and only if everything else is working, insert the DDS Assembly, monitor for RF output from the board and apply power. Look for RF around 12 MHz–13 MHz. If there is no output, try peaking TC1 and TC2.
All being well, Key “83” to give signal generator mode. The RF output should change to 80 m and the status indicator LEDs should correspond.
Fit the screened compartment around the 110 MHz oscillator, drilling holes for C1 and for one of C7s leads to pass through. This compartment must be made from two-sided fiberglass board, since both its screening and thermal conductivity properties are needed. Fit a top, drilling holes for adjustment of TC1 and TC2. Secure the top using some internal braid hinges.
Repeak TC1 and TC2 for clean stable output at some known frequency—and specifically ensure the output is not at a multiple or submultiple of that frequency.
Fit the shaft encoder. Adjust its disc, IC5 and D1 so that the disc runs just not touching IC5. The position of D1 is less critical (actually, none of it is very critical). It needs to be a about 1 cm away from the disc. Note that in bright incident light, the shaft encoder will not work reliably and may produce no or apparently random pulses. It is easy—but less than useful— to end up with a device which produces an output frequency proportional to the number of passing clouds!
Fit IC6 and IC7 last of all since their operation is independent of the rest of the board.
You do not need the PTT line connected for testing purposes, but should do so before starting serious operational use.
If there is evidence of multiplex noise in your receiver, fit a 1000 μF 15 V electrolytic from the junction of R33 and IC2 to earth. Multiplex noise is characterized by disappearing completely in sleep mode [73].
If there are occasional musical tones, these may be reduced by fitting three further decoupling capacitors (as well as C14), one in each corner of the DDS assembly from the 5 V power plane to the ground plane. Use two 10 n and a further 1 n with the shortest possible leads.
Shaft Encoder
The shaft encoder assembly comprises a tuning knob, a length of shafting, some bearings, a flywheel and an encoder disc. You will also need some means of taking out any end-float on the shaft. I was fortunate in that Jack, G3XKF turned up some beautiful brass fittings for me. Don’t skimp on the mechanics here as the “feel” of the tuning knob is important to pleasurable operation. At the very least, the assembly must spin freely with no binding.
I borrowed a flywheel from an old cassette recorder and drilled it out to take the shaft. Because of the software flywheel, you don’t need much physical mass here, but some inertia is needed to smooth the turning rate. A heavy tuning knob may be sufficient. Mine is loaded with lead caps off wine bottles, thereby doubling the pleasure. While on the subject of tuning knobs, one with a finger hole or a turning (tram) handle is best.
The software has been tuned for an encoder disc with 180 spokes. Since the detector emits a pulse for every dark/light transition, this gives a natural tuning rate of 360 × 10 Hz = 3.6 kHz per rev, a rate which is speeded up or slowed down by the software as appropriate.
Figure 15 shows the Disc I used which may be reproduced at size onto acetate film (by your local copy shop). Ensure the “spokes” reproduce black with as much contrast to the “slots” as possible. Glue it carefully onto an old knob with the toner side away from the detector to avoid scratching. Drill the knob right through first and ensure the disc is properly centered by spinning it (slowly!) on a shaft before the glue has fully set.

Figure 15. 180 slot encoder disc, 51 mm dia for reproduction on acetate film.
Long parallel tracks are provided on the DDS board to give flexibility in mounting position. The actual configuration will depend on whether the DDS board is mounted parallel to or at right angles to the display board.
Next Month
This article concludes with the calibration process and details of user operation.
Part 5 of 5
In this concluding article, the process for calibration is covered. Suggestions for operational use are also offered together with a complete definition of the keypad sequences and the resulting system behavior.
Calibration Process
Because the software has been explicitly written to handle a range of different reference oscillator crystal frequencies; and the use of any IF in the HF range (including 0 for direct conversion) there is a calibration process which stores the details of your installation in long term memory.
You will need to follow this process on first use, any time you change your Tx/Rx installation and then periodically, thereafter, to compensate for any crystal ageing.
There are two separate procedures, namely first calibrating the reference oscillator; and then calibrating up to three IF offsets (USB, LSB, CW). They are both conducted with the synthesizer connected to its mixer in the target Tx/Rx and with everything warmed up and with a reasonable ambient room temperature.
On first use, the general idea is to get the calibration roughly right (i.e., within a few kHz) against any crude definition of frequency available to you; and then to get it as good as you can against some known (and typically off-air) standard.
A Word of Caution . . .
Any time you enter one of the calibration modes (by pressing the “Cal” key) you must explicitly exit calibration mode before resuming normal use. There are only two ways to do this. One way is to save the calibration setting (931, 934, 937 or 933) and the other is to key “999” for a complete restart. Use the latter if in any doubt.
Reference Oscillator Calibration
This process gives best results when carried out at the highest possible frequency. In practice it is easiest to get it roughly right at some low frequency and finalize it against some HF standard such as WWV on 15 MHz.
On first use, the software is set for a 100 MHz reference oscillator. This is the lowest permitted frequency and was chosen to make for easy percentage arithmetic. For example, if you are using a 116 MHz crystal, you will actually generate frequencies roughly 16% higher than that indicated. Roughly, because no two crystals oscillators will go off at the same frequency.
You will need a separate AM receiver tuned to a station of known frequency. As an aide to getting started, PIC “N” MIX memory locations are preloaded with BBC World Service frequencies. These are not frequency standards but can be found reliably throughout Europe on a simple domestic radio with a short-wave band and will provide basic calibration. Proceed as follows:
- Set the synthesizer to indicate the target calibration frequency.
- Key “83” to enter signal generator mode. This mode ignores all IF offsets (and therefore any offset calibration errors) and generates the indicated frequency plus or minus only any calibration error.
- Locate the generated frequency on your AM receiver. You may need a small antenna attached to the synthesizer output. On first use it is worth calculating where the expected frequency will come out as the error can be substantial (up to +20%).
- Key “83” again to exit signal generator mode.
- Key “33” to enter reference clock calibration mode. This is the same as signal generator mode except that as you turn the tuning knob the displayed frequency remains fixed while the software reference oscillator trimmer is varied—thus altering the emitted frequency.
- Turn the tuning knob and check on the other receiver that you are moving in the right direction. Then keep turning until you get to the chosen calibration frequency. The tuning is very fine, so you will be turning for a long time if the error is large.
- Zero beat with the frequency standard initially and key “933” [Save Cal Cal] to retain this coarse calibration.
- Now repeat and refine the calibration at the highest possible HF frequency against some known standard.
Here is a little trick to help. Since tuning for zero beat can be a bit arbitrary, it is useful to set one VFO 200 Hz above the calibration frequency and the other VFO 200 Hz below it. When you hold down the A/B key, it will alternate between the two—and you can easily judge if the two beat notes are the same—to within a few Hz. Just take a second opinion, because a significant percentage of the population is tone deaf—and don’t know it!
The same trick can be extrapolated to fine tuning IF offset calibration.
IF Offset Calibration
There is no point in doing this until the reference oscillator is immaculately calibrated. Or rather, any time you alter the reference oscillator calibration, you must repeat this offset calibration.
This procedure lets the synthesizer know the exact frequencies of your IF offsets for LSB, USB and CW (if fitted). Remember to allow a modest time for crystal warm-up if you are switching between carrier crystals on the host.
If you are using direct conversion, either ignore this procedure and simply use the synthesizer in signal generator mode—or follow this procedure but enter 0 as the offsets. This applies equally if you are using the PIC “N” MIX as a QRP Tx.
To make life easy on first use, the USB offset is loaded with 10.7 MHz, the CW offset with 9 MHz and the LSB offset with 455 kHz as representing the three common choices. This may seem obtuse as none of these is correct for anyone. But it does provide the quickest way to get it right for most. On first use only then, choose the IF that is nearest to yours and copy it across to the other two as follows:
- Key “3” followed by “1,” “4” or “7,” selecting your desired offset from the choice of three.
- Key “93” followed by “1,” “4” or “7” thereby overwriting one unwanted offset.
- Repeat to overwrite the other offset.
At this stage all the offsets are identical and at least in the right part of the spectrum. Now proceed as follows:
- Select your USB crystal on the Tx/Rx. This is the lower frequency of the two sideband crystals.
- Key “31” [Cal USB] and turn the tuning knob to zero beat. At this point the frequency display will show your offset frequency. When happy, key “931” [Save Cal USB] to save the result—and reboot the synthesizer.
- Select your LSB crystal on the Tx/Rx. This is the higher frequency of the two sideband crystals.
- Key “37” [Cal LSB] and turn the tuning knob to zero beat followed by “937” [Save Cal LSB] as above.
- Repeat the process for your CW crystal if you have one, otherwise leave it in the centre of the IF passband.
IF offsets are calibrated to 10 Hz. If you want to be fussy, you can actually trim the carrier crystals themselves by a maximum of 5 Hz to get it exact. This will have absolutely no effect on IF performance.
This completes the calibration process.
Operational Use
If you have relied on a simple VFO up to now, then the range of features provided may seem daunting at first sight. There may indeed be some which turn out to be not useful in your particular operational circumstances. That is OK; simply ignore them. My general advice is to try them all out to start with, while contemplating the circumstances under which you would use them.
At the end of the day, you have 12 keys and a tuning knob and it does not take long to become familiar with using them in the right order!
Keypad Sequences
Substantial effort has gone into the ergonomic design of the keypad sequences to make them easy and safe to use. A brief review of the design thinking will hopefully make them more memorable. The key sequences are listed in Table 1 for easy reference.
| First Key ⇒ Second Key ⇓ |
1 USB |
2 Rate |
3 Cal |
4 CW |
5 Scan |
6 Mem |
7 LSB |
8 Freq |
| 0 | 9 10 m | 9 20 m | 9 30 m | 9 40 m | 9 Mem 0 | Bar Graph on Tune | 9 80 m | |
| 1 | Select USB | 9 Cal USB offset | Up 1 kHz | 9 Mem 1 | Hi Side Injection | |||
| 2 | 9 12 m | Tune Rate Mode | 9 Mem 2 | Broad Band | ||||
| 3 | 9 Cal Ref Clock | 9 Mem 3 | Sleep Mode | Sig Gen Mode | ||||
| 4 | 9 Cal CW Offset | Select CW | 9 Mem 4 | |||||
| 5 | 9 15 m | Guard Channel | 9 Mem 5 | |||||
| 6 | 9 160 m | Flywheel Disable | Scan Memories | 9 Mem 6 | ||||
| 7 | 9 17 m | 9 Cal LSB Offset | Down 1 kHz | 9 Mem 7 | Select LSB | Lo Side Injection | ||
| 8 | Scan Freq | 9 Mem 8 | Shift Display | Keyboard Freq Entry | ||||
| 9 | 9 Mem 9 | |||||||
| * | Scan VFOs | |||||||
| Note that the ergonomic beauty of the entries can only be visualized when looking at the keypad layout with overlay legends. Entries shown preceded with a “9” save the current frequency in that location when the two-key entry is preceded by the “Save” [9] key. Other combinations are “990” which saves the power-on frequency and “999” which restarts the software. | ||||||||
All key sequences are executed immediately. For visual confirmation, the key sequence is displayed and held briefly on the frequency readout. Any invalid sequence simply has no effect.
Every attempt has been made to combine the key legends into crude meaningful sentences. Obvious examples already discussed are Cal USB (enter USB calibrate mode) or Save Cal USB (save this frequency as USB calibration).
A few critical operational functions are achieved with one key press. Most normal functions require two key presses with the most commonly used functions being achieved with two presses of the same key.
The key sequences also have an up/down directional theme. For example USB is above CW on the keypad which in turn is above LSB.
All sequences of three keys begin with the “9” key [Save]. This acts as a qualifier on the two key sequence which follows. For example, “10” means go to 10 m. Conversely ”910” means save the present frequency as the 10 m default. The word “save” is always used here to mean retain even while powered off.
AT Switch-On
The system will initialize to 3.7 MHz until you change it. To store and retain a new switch-on frequency, first go to the desired frequency (by any means, see later) and enter “990” [Save, Save, Zero]. This will save the startup frequency with full 10 Hz resolution. The sideband in use at save time is not stored; and the system will initialize to the “normal” one for that frequency.
Band Switching
To change bands, key the first two digits of any one of nine bands in meters. (e.g. “80” for 80 m, “10” for 10 m). The “nonexception” is Top Band (alas, no longer Top) where you key “16” as per the above rule. The synthesizer will immediately go to the initialization frequency for that band and automatically select the “normal” sideband. If fitted, the band switching and sideband selection outputs to the host will change automatically to correspond.
If you are on USB or LSB at band switch time, the new band will initialize to the “normal” sideband for that frequency. If you are on CW, the new band will initialize on
CW.
To change the initialization frequency for any band, first go to the desired frequency (by any means, see later) and enter “9” [Save] followed by the 2-digit band sequence. This will save the frequency rounded down to the nearest 1 kHz.
In fact, you may save any arbitrary frequency against each 2-digit band code. For example, if you never use some bands, you may save any useful frequency in their 2-digit allocations. And change them at will.
Specifically, the sideband and band switching outputs are computed from the 10 MHz and 1 MHz digits of the actual frequency and not from the 2-digit key sequence.
Managing Two VFOs
Because this is the most useful and critical feature set, all functions are achieved immediately with one key press. There are three of them on the bottom row of the keypad, from left to right:
A/B
Pronounced in full as “VFO A or VFO B.” This swaps between the two VFOs. Whichever one you are on, you will switch to the other. In fact, both the frequency and the mode associated with the VFO are swapped over. In this context, mode is the sideband (i.e., USB/LSB/CW), display resolution (10 Hz or 100 Hz) and injection either high or low side of the IF). Since the two VFOs may be on nearby or vastly different frequencies, this gives a full range of facilities from IRT or ITT through to cross-band capability.
A = B
Sets both VFOs to the same frequency and mode, namely the ones you are using at the moment of entry. This is how the system is initialized at power-on—with both VFOs the same.
This key is used to establish a known situation before tuning around should you want to be able to revert quickly to the original frequency (by pressing “A/B”)—or if you want to use split working for IRT, etc.
Split
This toggles between split and pure transceive operation. The state of this setting is immediately apparent from the LED indicators.
If you are operating “split” then the Rx VFO LED will be a different color (red/green) to the Tx VFO LED. Conversely, on pure transceive, they are the same color.
In any event, the frequency readout always applies to the current transmit/receive state. If you are on receive, the receive frequency is shown; on transmit, the transmit frequency.
Display Resolution
By default, the 6-digit display starts with the most significant digit on the far left with no leading zero, and then fills the rest of the digits to the right. Decimal points are placed after the MHz and kHz digits.
The consequence of this autoranging is that the right hand digit gives 10 Hz resolution on frequencies below 10 MHz and 100 Hz resolution above 10 MHz.
If you want to suppress the 10 Hz digit below 10 MHz or show it above 10 MHz then key “78” to toggle back and forth—per VFO. The whole display moves along in the appropriate direction, complete with decimal points and if necessary, suppresses one leading zero.
USB/LSB/CW
The "normal sideband" is selected automatically as a function of displayed frequency when you switch bands or go to a memory frequency. If you want to override this at any time or choose CW, press the USB, CW or LSB key respectively, twice. The front panel LEDs will confirm the change, the generated frequency will change; but of course the displayed frequency itself will not change. If you have not included the optional IF selection outputs to your host Tx/Rx, you will have to select the appropriate offset there manually.
The chosen offset is retained and associated with each VFO when swapping VFOs.
Normal Tuning
Tuning around is achieved—self evidently—by turning the tuning knob. Clockwise to increase frequency, anticlockwise to decrease it.
This simple statement belies a number of intelligent tuning algorithms which seek to establish your intent and act to help.
With the specified shaft encoder disk, the natural tuning rate is 3.6 kHz per rev. This is a little fast for easy netting and far too slow for rapid frequency excursions. Accordingly, the software monitors how fast you are turning the knob—and for how long—and smoothly alters the tuning rate between the extremes of ≈1 kHz per rev through to ≈50 kHz per rev. If you want to monitor this effect, especially while getting used to it, key “70” to toggle on and off the LEDs as a bar-graph rate of tune indicator.
At extreme turning rates (typically, a quick flick of the wrist) a software flywheel engages automatically and tuning continues in rapid 1 kHz steps in the chosen direction with no further turning of the knob. All the LEDs light when the flywheel is engaged.
The slightest turn of the knob in the opposite direction immediately cancels any outstanding frequency changes, resets the tuning rate to minimum and cancels the flywheel.
Equally, any transmit/receive switching or any key press achieves the same effect instantly.
Operation of the flywheel may be toggled between enabled and inhibited by keying “26.” It is enabled at switch-on.
Since the synthesizer is continuously tunable over the whole range, you could, in theory get to any frequency by continuously turning the knob.
This is realistic for modest excursions if the flywheel is engaged but in practice, large (>2 MHz) excursions are best achieved using rate tuning or starting from the nearest band or memory frequency; or entering the frequency on the keypad.
For this reason and to maintain performance, the band switch outputs to the host are not recomputed in normal tuning mode unless the flywheel is engaged. Should you find yourself tuning slowly across a band-edge boundary and want to update the switching outputs, simply force this by selecting (or reselecting) the desired sideband.
Up and Down 1 kHz
If you want to quickly tune to the nearest kHz point, key “47” to round the frequency down to the nearest kHz — or key “41” to round up to the nearest kHz.
Rate Tuning
In this mode the tuning knob controls not the frequency but rather the rate of change of frequency. Thus, the more you turn the knob clockwise, the faster the frequency will increase. The more you turn the knob anticlockwise, the faster the frequency will decrease.
Any change of direction will freeze the frequency instantly. In this mode, the LEDs provide a bar-graph display to show tuning rate.
To enter this mode, key “22” [Rate Rate]. The kHz decimal point is pulsed to denote nonnormal tuning.
To exit, press any key or switch between transmit and receive.
Keypad Frequency Entry
Any frequency may be entered from the keypad to the nearest kHz. To use this mode, key “88” [Freq Freq]. The frequency display will blank, showing only the MHz and kHz decimal points.
At this point you must now enter FIVE digits.
This implies entering a leading zero for frequencies below 10 MHz. For example, 1.812 MHz is entered as “01812.” Conversely, 18.123 MHz is entered as “18123” and 181 kHz is entered as “00181.” Immediately the fifth digit is entered, the display auto-ranges, the output frequency is generated, the “normal” sideband is selected, the front panel LEDs are updated as are the band select and sideband select outputs to the host.
If you make a mistake part way through, key either “*” or “#” to abort the sequence and start again.
Memory Operation
Ten memories are provided, accessed from keys 60–69 [Mem 0–Mem 9]. These may be visualized simply as quick jumps in frequency—much like band switching. Having switched to a memory frequency, tuning proceeds as normal from that frequency without altering the original stored frequency.
To change the stored frequency, go to the desired new frequency by any means and key “9” [Save] followed by the two-digit memory code. For example, to store the current frequency in memory location five, key “Save Mem 5. Memory locations are stored with full 10 Hz resolution.
Scanning in General
There are several scanning modes which share the following features in common:
All are entered by a two-key sequence, the first key being “5” [Scan]. All are exited to normal tuning mode by pressing any key. Scanning stops immediately on transmit/receive switching. If scanning and operating “Split,” then the system reverts to pure transceive on any transmit/receive change. While any scan mode is engaged, the kHz decimal point is pulsed as a visual reminder.
These scanning modes are useful not only for monitoring activity in a number of different operational situations, but are invaluable in adjusting band/high/low-pass filters in signal generator mode.
Spot Frequency Scanning
To switch continuously between two frequencies, first place one VFO on each frequency. Then key “5*” [Scan A/B]. Turn the tuning knob clockwise to increase the switching delay and anticlockwise to decrease it. The amount of delay is shown on the LED bargraph.
Memory Scanning
To cycle between the ten memory locations, key “56” [Scan Mem].
Again, the tuning knob controls switching delay.
Range Scanning
To scan across a range of frequencies, put one VFO at each end of the range and then key “58” [Scan Freq]. You will then tune up from the low to the high limit, switch back to the low limit—and repeat continuously. At switch time, the line to the “RxA” LED is pulsed briefly low and can be used to synchronize a “scope, etc. The tuning knob now controls the frequency increments and hence the tuning speed—as shown on the bar graph. The display is dimmed in this mode to improve performance.
Guard Channel Scanning
To monitor a fixed frequency for activity—or lack of it — while tuning elsewhere, first tune to the fixed frequency (or guard channel). Then switch VFOs [A/B] and tune around (or even switch bands), leaving the other VFO on the guard channel.
Obviously, you can manually switch back and forth to the guard channel at any time [A/B], but to do it automatically key “55” [Scan Scan]. You may still tune on the main VFO, but approximately every 20 seconds the software will switch to the guard channel for about one second and then switch back again. For performance reasons, the flywheel is disabled on the main VFO, but otherwise full normal tuning is available.
Select Broad Band
If the display frequency does not coincide with one of the nine HF amateur bands, the band selection logic automatically selects the “broad band” output. This is so that you have the choice of using some different front-end on your Rx. If you want to force this output, then key “72” to toggle this output bit on and off.
Signal Generator Mode
In signal generator mode, the displayed frequency is generated with no offsets. Key “83” to toggle signal generator mode on and off. The “Sig Gen” LED provides visual confirmation.
You may tune, switch bands and scan while still in signal generator mode. The theoretical frequency range of the DDS chip and control logic is from audio to half the reference clock frequency. In practice, the LPF and buffer amplifier limit this response at both ends of the spectrum, so if you need the extremes, capacitively couple an output from the DDS subassembly output pin (Pin 19).
Hi/Lo Side Injection
By default, the synthesizer generates hi-side injection. That is, wanted frequency plus intermediate frequency offset. If you have a high IF and are on one of the higher HF bands, the injection frequency is getting close to the top limit for adequately suppressing unwanted birdies. You may force lo-side injection any time by keying “87’ or hi-side injection by keying “81.” This choice is retained with the VFO currently in use, so one option is to have both VFOs on the same frequency, but one each on hi/lo side injection.
The sideband selection outputs are switched to correspond, so if all is setup and calibrated properly, you should hear no perceptible shift in net frequency.
This feature is also useful if you have an asymmetric IF filter since you may arrange to always use it on the same sideband.
The facility is retained for flexibility since it may be possible to use the synthesizer on 6 m with lo-side injection into a high IF—or with HF transceivers using up-conversion architectures. Neither of these possibilities has been tried.
Sleep Mode
This mode was included in development to determine if the PIC and/or the multiplexed display was coupling any noise into the DDS output. In Sleep mode, the PIC stops executing the program so the displays and keypad are effectively switched off and the DDS continues to generate the last commanded output. In my installation there is no perceptible difference in noise on the DDS output at any frequency.
The facility was retained because the substantial power saving may be useful in some environments—and noise is an insidious beast prone to appear unsolicited at any time.
To enter Sleep mode key “73.” To exit Sleep mode, simply turn the tuning knob.
In Conclusion
Hopefully this article will have inspired you to upgrade a conventional injection system. My intention in writing it was to remove some of the mystique surrounding “computers” by showing their place in a real-world useful application. I look forward to reading about the fruits of your labors in the near future.
Note
*This five-part article is reprinted in its entirety by permission of RadCom Magazine, a ham radio magazine publication in the U.K.(website www.rsgb.com), and the author. All international copyrights are reserved.
謝辞
My thanks go to Jack, G3XKF who built the first production prototype and suffered some of the early software. Jack is also responsible for the photography and was good enough to turn up the bushes for my shaft encoder.
My thanks also to Keith, G3OHN who independently designed and built something similar for his Third Method transceiver Much useful mutual learning occurred over the air. Also to David, G3LUB for his help with spurious measurements.
And lastly, to my wife Fran who was reliably advised she had seen the last project with the third method transceiver.
著者
