概要
設計リソース
評価用ボード
型番に"Z"が付いているものは、RoHS対応製品です。 本回路の評価には以下の評価用ボードが必要です。
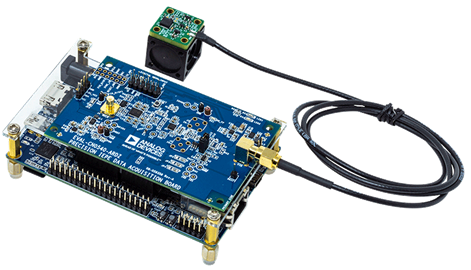
- EVAL-CN0532-EBZ ($101.52) IEPE-Compatible Interface for Wideband MEMS Accelerometer Sensor
- EVAL-CN0540-ARDZ ($203.03) 24-Bit Data Acquisition System for IEPE Sensors
- EVAL-XLMOUNT1 ($115.06) Mechanically optimized mounting block for MEMs accelerometer boards
デバイス・ドライバ
コンポーネントのデジタル・インターフェースとを介して通信するために使用されるCコードやFPGAコードなどのソフトウェアです。
FPGA/HDL
機能と利点
- 機械(ポンプ、ファン、モータなど)への取り付けが容易で、センサー信号の完全性を20kHzまで維持
- 広帯域MEMS加速度センサーのデータを一般的なIEPEフォーマットで出力
- DAQソリューションが高忠実度を実現、DC~54kHzのIEPEアナログ入力帯域幅
- 組込みのFPGAソフトウェアが、ローカルの組込み処理またはネットワーク処理用に生データをキャプチャして保存
- IIO Oscilloscopeアプリケーションがデータの迅速な可視化と評価を実現
参考資料
-
CN0549 User Guide2020/10/28WIKI
-
Python™/MATLAB®で気軽に開発可能 「CbM開発プラットフォームCN0549」2021/07/15PDF686 K
-
CN-0549: 状態基準保全(CbM)開発プラットフォーム (Rev. 0)2020/10/28PDF370 K
-
 CN0549 New Condition-Based Monitoring Platform from ADI2025/09/05
CN0549 New Condition-Based Monitoring Platform from ADI2025/09/05 -
 ADIセンサーインターフェイスシリーズ - CbMと振動解析2025/09/05
ADIセンサーインターフェイスシリーズ - CbMと振動解析2025/09/05 -
 CN0549: 状態基準保全(CbM)開発プラットフォーム2025/09/05
CN0549: 状態基準保全(CbM)開発プラットフォーム2025/09/05 -
 ADI Sensor Interface Series - CbM and Vibration Analysis2025/09/05
ADI Sensor Interface Series - CbM and Vibration Analysis2025/09/05 -
 CN0549: Condition-Based Monitoring Development Platform2025/09/05
CN0549: Condition-Based Monitoring Development Platform2025/09/05 -
 CN0549 - CbM Development Platform2025/09/05
CN0549 - CbM Development Platform2025/09/05 -
 CN0549 状態基準保全 (CbM) 開発プラットフォーム2025/09/05
CN0549 状態基準保全 (CbM) 開発プラットフォーム2025/09/05
-
高い忠実度を備えた状態監視用振動アクイジション・プラットフォーム2021/08/13
-
オープンソースの再利用可能ソフトウェア・スタックがCbMのリアルタイム処理とアルゴリズム開発を実現2021/08/13
-
状態基準保全システムには、なぜMEMS加速度センサーが最適なのか?2021/02/01
-
状態基準保全向けソリューションの性能は、振動センサーで決まる2019/06/01 アナログ・ダイアログ
-
Condition Based Monitoring (CbM) using MEMS Accelerometers2022/03/23
-
Accelerate Smart Manufacturing with complete system level solutions for condition monitoring and robotics motion control from Analog Devices2021/04/14
-
Condition-based Monitoring (CbM) Development Platform, from Vibration Sensing to Algorithm Development2021/01/19
回路機能とその特長
振動検出を使用する機械の状態基準保全(CbM)が、工業用アプリケーションにおいて重要性を増しています。企業は機械類の寿命と性能の最適化、および総所有コストの削減に努めており、その一方で、このような情報に備えることを中心とした新たなビジネス・モデルの開発に関心を寄せる企業もあります。モニタリングを必要とする機械類の状態を正確に表すには、大量のデータセットを収集して、通常動作モードと故障状態の両方について、その装置の基準となる動作ポイントを決定する必要があります。一度このデータを収集すれば、その装置を正確に分析するためのアルゴリズムまたは閾値検出ルーチンを作成することができます。
CbM を行うには、時間領域と周波数領域の両方で、すべての高調波、エイリアス、その他の機械的相互作用を考慮できるように、全帯域幅におよぶデータを収集する必要があります。このデータ収集には、高性能のセンサーと、忠実度の高いリアルタイムのデータをデータ解析用のツールやアプリケーションに提供することのできるデータ・アクイジション(DAQ)システムが必要です。
MATLAB®などの実績あるツールや、Tensorflow などのより新しい Python ベースのツールを使用すれば、スマート機能を利用した意思決定のためのデータ分析、機械プロファイリング、アルゴリズム作成が大幅に簡素化されます。
振動検出は、従来もほとんどの CbM アプリケーションの主流を占めていますが、これは様々なセンサーを利用できること、および分析の背景となる科学への理解が進んでいることによります。集積電子圧電(IEPE)標準は、今日の工業分野の主流となっているハイエンドの微小電気機械システム(MEMS)センサーや圧電センサー用として、広く使われているシグナリング・インターフェース標準です。


回路説明
振動解析
振動検出は、従来もほとんどの CbM アプリケーションの主流を占めていますが、これは様々なセンサーを利用できること、および分析の背景となる科学への理解が進んでいることによります。しかし、新たな装置の分析が必要となったり、ある特定の使用事例が装置にどのように影響するのかをより深く理解する必要が生じたりした場合はどうでしょう。必要な見通しを立てるには、まず、最適条件下での動作や、故障を誘発するような条件下での動作において、その装置がどのような挙動を示すかを理解する必要があります。振動源のある状態で装置が動作した場合の周波数スペクトルの例を図 2 に示します。


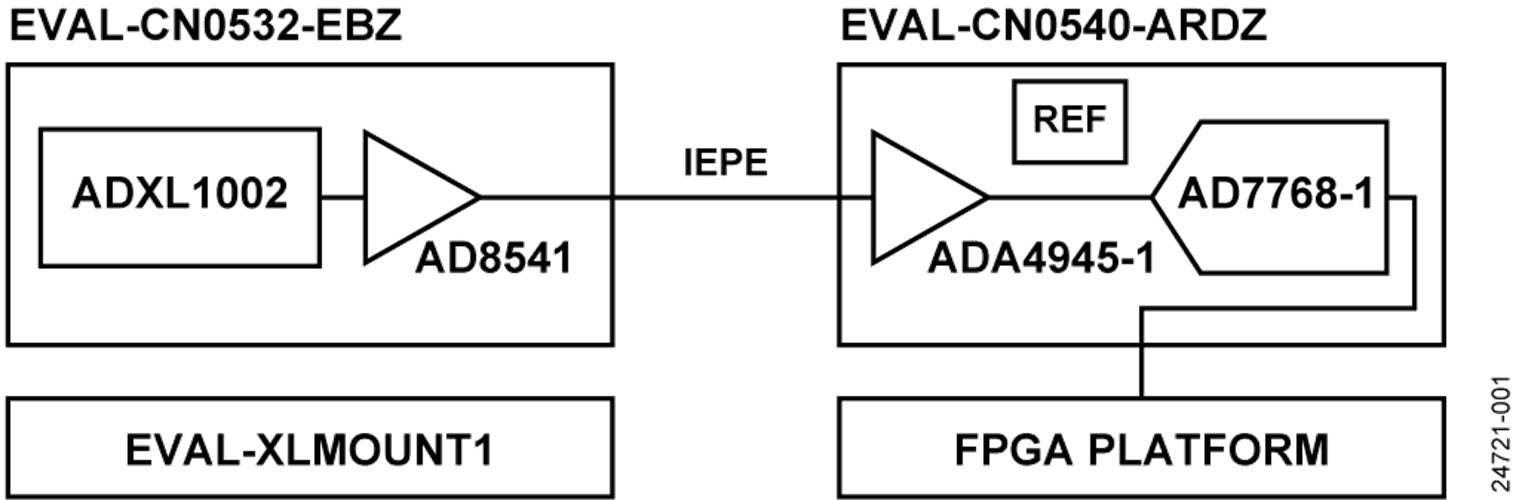
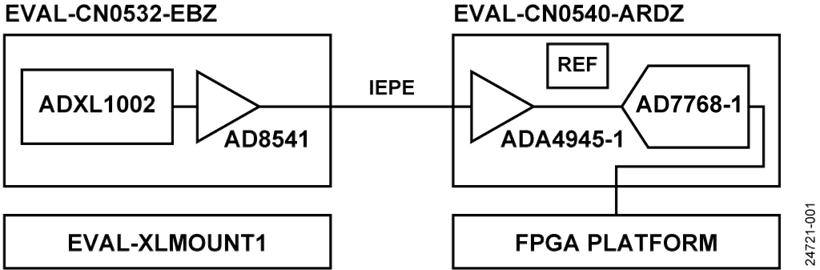
振動センサー − IEPE インターフェース
IEPE は、今日の工業分野の主流となっているハイエンドの圧電振動センサーに広く使われているインターフェース標準です。IEPE インターフェースは、信号とグラウンドだけで構成される2 線式の信号規格の 1 つです。CN-0540 などの DAQ カードは、信号線を介し、通常 10V~30V の任意の電圧を持つ電流として、CN-0532 振動センサーに電源を供給します。信号線への電源供給は電流源によって行われるので、センサー・デバイスは電圧レール上の加速度データを変調することができます。したがって、1 本のワイヤを、センサーの電源と変調出力電圧の両方に使用できます。
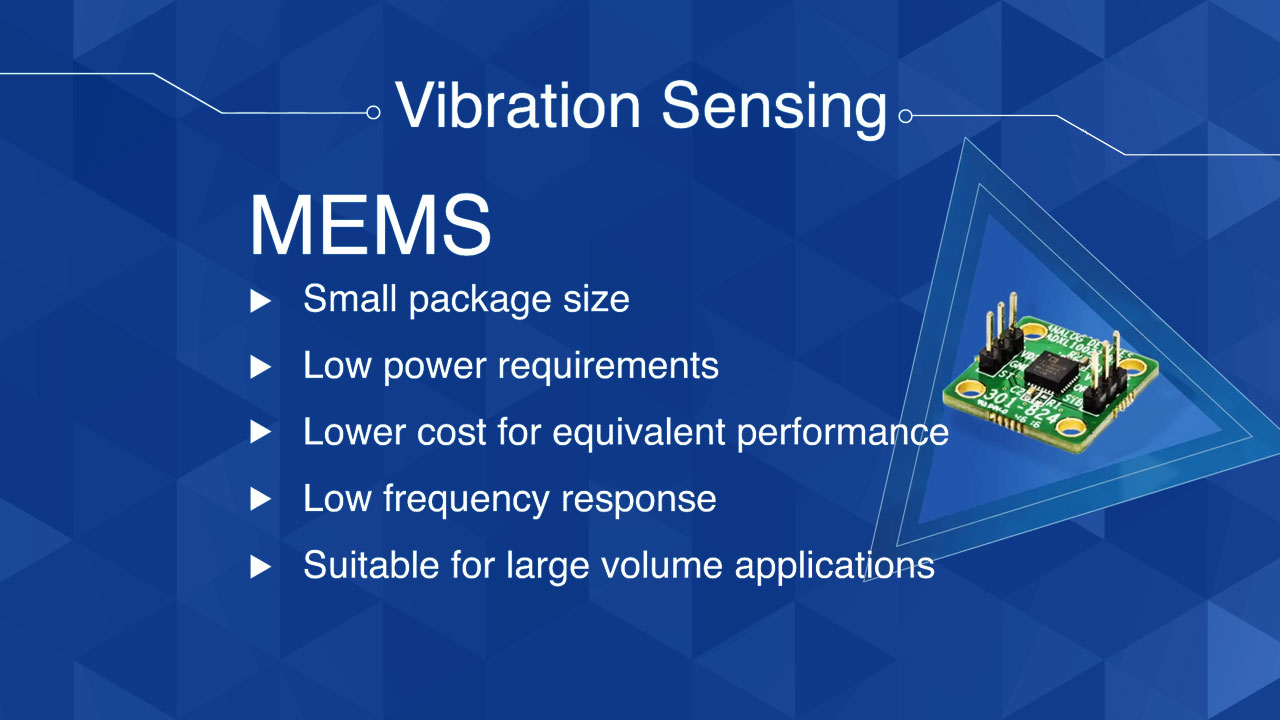
MEMS センサーと圧電センサー
圧電式加速度センサーは、周波数応答の範囲が広く振動入力に対する感度が良好なことから、今日の CbM 市場の主流を占めています。しかし、最近の MEM 技術の進歩によって、圧電式とMEM 式の加速度センサーの性能的ギャップはかつてほどではなくなっています。
CN-0532 IEPE MEM 振動センサーは、ADXL1002 がベースになっています。ADXL1002 のノイズと帯域幅は圧電式センサーに匹敵するもので、更に温度感度、DC から低周波数での応答性、位相応答(したがってグループ遅延も)、耐衝撃性、衝撃からの回復などの点でも優れた性能を発揮します。このセンサーは±50g の直線的な測定範囲を備えていますが(フルスケール比(FSR)で±0.1%以内)、これは幅広い振動アプリケーションに十分対応できる値です。ADXL1002 と、IEPE インターフェースでそれを使用する方法についての詳細は、CN-0532 のウェブ・ページを参照してください。
CN-0549 を使用すると、圧電センサーの性能と MEMS ベースのセンサー・ソリューションの性能を直接比較することができます。
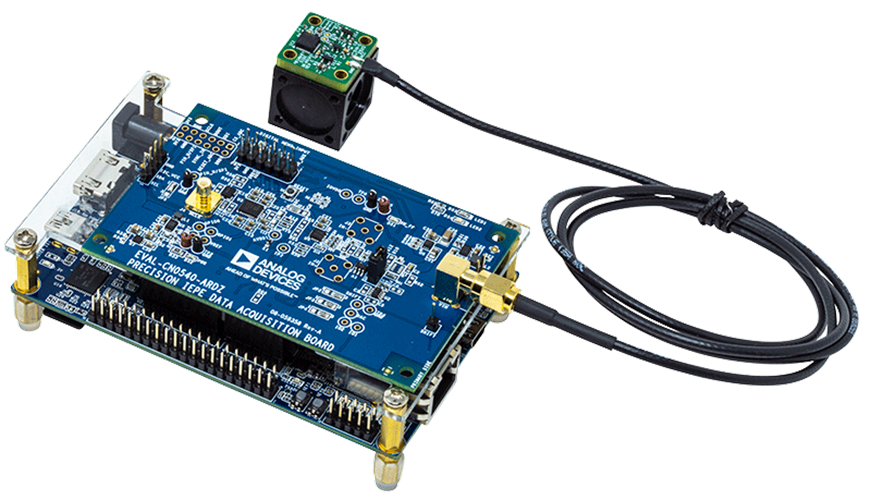
機械的なセンサー取り付け
CbM アプリケーションの大きな課題は、アナログの世界とデジタルの世界を橋渡しすることです。信頼できるセンサー・データをモニタ対象の装置からプロセッサに取り込むことは、容易ではありません。最初に問題となり、かつ最も重要なのは、センサーとモニタ対象装置を確実に接続する必要があるということです。対象装置にセンサーを取り付けた際には、機械的な異常やセンサー取り付けの影響によって、振動スペクトルが変わってしまわないようにすることが重要です。


EVAL-XLMOUNT1 は 5 面を使用できる取り付け用の立方体で、データに関するセンサーの性能を低下させることなく、測定対象装置に CN-0532 を取り付けることができます。EVAL-XLMOUNT1は、機械的取り付けによって生じる周波数20kHzまでのすべての誤差源を完全になくすことができるように設計され、テストされています。また、この取り付け用立方体には、アルミニウム表面に不導体層を形成して短絡を防止するために、陽極酸化処理も施されています。
データ・アクイジション − IEPE
一般的なデータ・アクイジションでは、電圧と電流を直接取り込んでデジタル・コードに変換します。しかし、IEPE インターフェースが異なるので、より特殊な DAQ ボードが必要です。DAQ ボードは、適切な電流と励起電圧レベルでセンサーに電源を供給できなければならず、更にセンサーが収集したデータをリードバックできなければなりません。このデータは、その同じ励起電圧で変調されます。
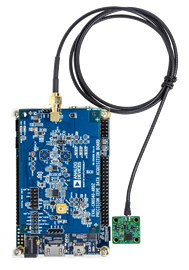
CN-0540は24ビットのシングル・チャンネルDAQシステムで、IEPE センサーとインターフェースを取るために最適化されています(図 4 を参照)。この DAQ システムは、約 26Vの最大励起電圧をセンサーに供給できます。AD7768-1 ADC は、256KSPSでサンプリングを行います。これは、6.144Mbps のデータがプロセッサに送られることを意味します。使用するデータ・アクイジションについての詳細は、CN-0540 のウェブ・ページを参照してください。
フィールド・プログラマブル・ゲート・アレイ(FPGA)ホスト
CN-0540 のハードウェアは標準的な Arduino®フォーム・ファクタなので、Arduino フォーム・ファクタに必要なデータ・レート、電気的ピン配置、および機械的フォーム・ファクタをサポートできるすべての処理システムを使用することができます。2 つの大手 FPGA メーカーが提供する開発システム、Intel DE10-Nano システム・オン・チップ(SoC)プラットフォームと、Xilinx Cora Z7-07S SoC プラットフォームがサポートされており、必要な機能をすべて備えたリファレンス設計も提供されています。また、ハードウェア記述言語(HDL)のリファレンス設計が、オープン・ソース・ソフトウェアとして提供されています。したがって、これらの設計は好みに応じて容易に他のプラットフォームへ移植することができます。HDL ファイルと関連文書の詳細については、CN0540 HDL ユーザ・ガイドのページを参照してください。
FPGAベースのSoCは、CN-0540が生成する大量の高精度データを扱うために特別に選ばれたものです。固定処理は、ロジックを使うことで、CPU 処理よりもはるかに少ない消費電力で効率的に行うことができます。FPGA は、このような固定処理の負荷を軽減し、組込み ARM®を解放して他のタスクを行えるようにするために使用できます。
ソフトウェア・アーキテクチャとインフラストラクチャ
DE10-Nano および Cora Z7-07S SoC プラットフォームは、共にLinuxを実行して CN-0540とインターフェースを取り、その制御を行います。Linux は、アナログ・デバイセズの Kuiper Linux ディストリビューションで提供されます。これは Raspbian をベースにしたものです。このディストリビューションには、標準コンパイラと Python のようなインタープリタを含む、組込み開発とデバッギング用の標準ソフトウェア・ツールが含まれています。このディストリビューションによって提供されるカーネルには、CN-0540 の様々な部品を制御するために必要なドライバが含まれています。
CN-0540 のドライバは、工業用入出力(Industrial Input Output:IIO)フレームワークと呼ばれる標準カーネル・ドライバ・フレームワークで提供されます。IIO フレームワークは、アナログ・デバイセズや他の多くのベンダが製造するコンバータ、アンプ、センサーなどの製品や、その他いくつかの部品をサポートしています。
CN-0540 ソフトウェア・ファイルと、ソフトウェア・イメージを使用するための準備方法の詳細については、アナログ・デバイセズの Kuiper Linux のウェブ・ページを参照してください。


低レベル制御
IIO ドライバは、CN-0540 の制御と、データまたはバッファ収集の両方の側面を扱います。レジスタ・アクセスを含め、最も低いレベルでドライバとのインターフェースを取る場合は、IIO ライブラリ(libIIO)を使用することができます。libIIO は、実行コードによって、それ自体がドライバと通信できます。通信はSoC ボード上で直接行うか、あるいはホスト PC からリモートで行います。IIO デバイスのデバッグ用として、標準グラフィカル・インターフェース(IIO-Oscilloscope)が提供されています。このツールには、移動高速フーリエ変換(FFT)機能が標準で付属しています。これにより、センサーの帯域内で発生するあらゆる異常振動を可視化することができるので、外部 PCを接続しなくても、基本的なデバッグと分析が可能です。
IIO-Oscilloscope は、特定のドライバ群との連携を容易にするために、カスタマイズ可能なプラグインをサポートしています。CN-0540 は、IEPE バイアス誤差の補正を容易にして回路のアンプ・ゲインをできるだけ大きくするために、特別なプラグインを備えています。この補正は一般に IIO-Oscilloscope を通じて行うことができますが、プラグインを使用すれば、補正プロセスがより簡単なものになります。


アルゴリズム開発 − MATLAB と Python
IIO-Oscilloscope を使用して、システムが意図したとおりに動作するかどうかの検証と妥当性確認が完了したら、異なる言語を使用する他のインターフェースや、データ分析用に設計された他のツールへ移行することができます。CN-0540 へのインターフェースには C/C++を使用することができます。しかし、基本的なツールの組込みは、Pythonや MATLAB によって行います。これらの言語は、Python 側に立脚した Tensorflow や PyTorch のようなフレームワーク、あるいは MATLAB 用の様々なツールボックスへデータを取り込むためのワークフローを簡素化します。
CN-0540 は、pyadiiio モジュールを通じて Python をサポートしています。このモジュールは、データ・サイエンティストやアルゴリズム開発者向けに開発された、使い易いアプリケーション・プログラミング・インターフェース(API)を提供します。Kuiper Linux にプレインストールされていますが、Python Package Index(PyPI)を通じて入手することもできます。ADXL1002 を取り付けた CN-0540 に接続して、データを取り出す場合の簡単な例を図 6 に示します。
図 6. CN-0540 の Python の例
CN-0540 は、アナログ・デバイセズのセンサー・ツールボックスを通じて MATLAB をサポートします。これは自己完結型のツールボックスで、例(サンプル)、インターフェース・クラス、およびセンサーのようなハードウェアを対象としたインフラストラクチャが含まれています。Pythonクラスに似た MATLABインターフェース・クラスは一般的な API に従ったもので、MathWorksが提供していたAPIがベースになっています。Python同様、このインターフェース・クラスは、データ・サイエンティストやアルゴリズム開発者向けに開発された使い易い API を備えています。ADXL1002 を取り付けた CN-0540 に接続して、データを取り出す場合の簡単な例を図 7 に示します。
図 7. CN-0540 の MATLAB の例
このツールボックスは、MATLAB の Addon Explorer から直接インストールするか、GitHub のインストーラを通じてインストールすることができます。
回路の評価とテスト
CN0549はIEPEに対応した高速のCbM開発プラットフォームで、アナログ・デバイセズと認定代理店の両方から容易に入手できるボードとハードウェアを組み合わせて実装されています。これをオープン・ソースのソフトウェアとともに使用すれば接続や可視化が容易になり、データ分析ツールとも容易にインターフェースを取ることができます。
必要な装置
以下の装置類が必要になります。
- EVAL-CN0532-EBZ
- EVAL-CN0540-ARDZ
- EVAL-XLMOUNT1
- FPGA開発ボード(DE10-NanoまたはCora Z7-07s)
- FPGA開発ボードは販売パートナーを通じて入手可能
- サブミニチュア A(SMA)ケーブル
- 高精細マルチメディア・インターフェース(HDMI)ケーブル
- Kuiper Linux イメージがインストールされた 16GB microSDカード
- USB On-The-Go(OTG)アダプタ
- USB ドングルの付いたワイヤレス・キーボードおよびマウス
システム・セットアップ
システム・セットアップについては図 8 を参照してください。


開始にあたって
システムをテストして動作させるために必要な基本的ステップを以下に示します。
- アナログ・デバイセズ Kuiper Linux のウェブ・ページにある最新のソフトウェア・イメージを使用して、microSD カードを作成します(このステップは図 9 には示されていません)。
- Arduino ピン・コネクタを使って、CN-0540 DAQ ボードとDE10-Nano FPGA プラットフォームを接続します。
- SMA コネクタを使って、CN-0532 を CN-0540 に接続します。ただし、CN-0532 には SMA コネクタがないので、ケーブルを切断してコネクタを直接ハンダ付けする必要があります。
- マウンティング・ブロックに付属しているネジを使って、EVAL-XLMOUNT1 の面の 1 つに CN-0532 を取り付けます。
- DE10-Nano に microSD カードを挿入し、USB OTG アダプタを接続してモニタの HDMI ケーブルを挿入します。
- DE10-Nano 評価用キットに付属している 5V DC 用 AC アダプタを使い、DE10-Nano に電源を供給します。


DE10-Nano、またはサポートされているその他のプラットフォームを使用してシステムを動作させるためのステップ・バイ・ステップの詳しい説明については、CN0549 ユーザ・ガイドを参照してください。
テスト結果
システムのテストは以下の手順で行います。
- EVAL-XLMOUNT1 を使って、プログラム可能な振動源にCN-0532 を取り付けます。振動台または同等の装置を使用するのが最も望ましい方法です。
- CN-0540 IIO-Oscilloscope プラグインを開いてセンサーのオフセットを補正し、補正ルーチンを使ってシフト電圧を記述します。
- 振動源を起動して、2kHz の振動音を発生させます。
- IIO-Oscilloscope のキャプチャ・ウィンドウへ移動し、16,384 個のサンプルと 3 個ずつの平均で周波数領域のプロットを設定します。
- [Capture](キャプチャ)ウィンドウの[Play](プレイ)ボタンをクリックします(最上部左側を参照)。
- 2kHz の振動音が、想定通り周波数スペクトルに現れていることを確認します。振動源や機械的取り付け状態の問題が原因となって、プロットには他にもいくつかの周波数スプリアスが現れることがあります。


DE10-Nano、またはサポートされているその他のプラットフォームを使用してシステムを動作させるためのステップ・バイ・ステップの詳しい説明については、CN0549 ユーザ・ガイドを参照してください。