ステッピング・モーター
低速時や静止状態での高トルクで人気があるステッピング・モーターは、高精度の位置決めが必要な場合に選択されるデバイスです。アナログ・デバイセズのTrinamicの業界最先端技術と組み合わせることで、ステッピング・モーターの特性を活用し、これらのモーターは、1回転あたり最大51,200マイクロ・ステップを用いてデジタル情報を完璧な物理的動作に変換します。
Go to Product Selection Table
Viewing:
カテゴリー内の製品
PD-1461
製造中
NEMA 24 smart stepper motor 12 to 52V, 3Nm, 256 µSteps, EtherCAT interface, closed loop
PD-1243
製造中
NEMA 17 smart stepper motor 22Ncm, 256 µSteps, SixPoint ramp controller with CAN interface, SensOstep, StallGuard2 and CoolStep, StealthChop
PD-1378
製造中
NEMA 23 smart stepper motor 12 to 52V, 55Ncm, 256 µSteps, S-Shaped and SixPoint ramp controller with CAN interface, closed loop
PD-1278
製造中
NEMA 24 smart stepper motor 12 to 52V, 3Nm, 256 µSteps, SixPoint ramp controller with CAN interface, SensOstep, StallGuard2 and CoolStep, StealthChop
PD-1210
製造中
NEMA8 / 20mm flange size stepper motor and the TMCM-1210 controller / driver
PD-1276
製造中
NEMA 23 smart stepper motor 12 to 52V, 55Ncm, 256 µSteps, SixPoint ramp controller with CAN interface, SensOstep, StallGuard2 and CoolStep, StealthChop
PD-1076
製造中
NEMA 23 smart stepper motor 9 to 51V, 55Ncm, 256 µSteps, with S/D and UART interface, StallGuard2, CoolStep and StealthChop
PD-1241
製造中
NEMA 17 smart stepper motor 10 to 30V, 40Ncm, 256 µSteps, SixPoint ramp controller, with USB, S/D, CAN and RS485 interface, SensOstep, StallGuard2 and CoolStep, StealthChop
PD-1370
製造中
NEMA 17 smart stepper motor 9 to 28V, 22Ncm, 256 µSteps, S-Shaped and SixPoint ramp controller with RS485 interface, closed loop
PD-1260
製造中
NEMA 23 smart stepper motor 12 to 52V, 55Ncm, 256 µSteps, SixPoint ramp controller with USB, S/D RS485 and CAN interface, SensOstep, StallGuard2 and CoolStep, StealthChop
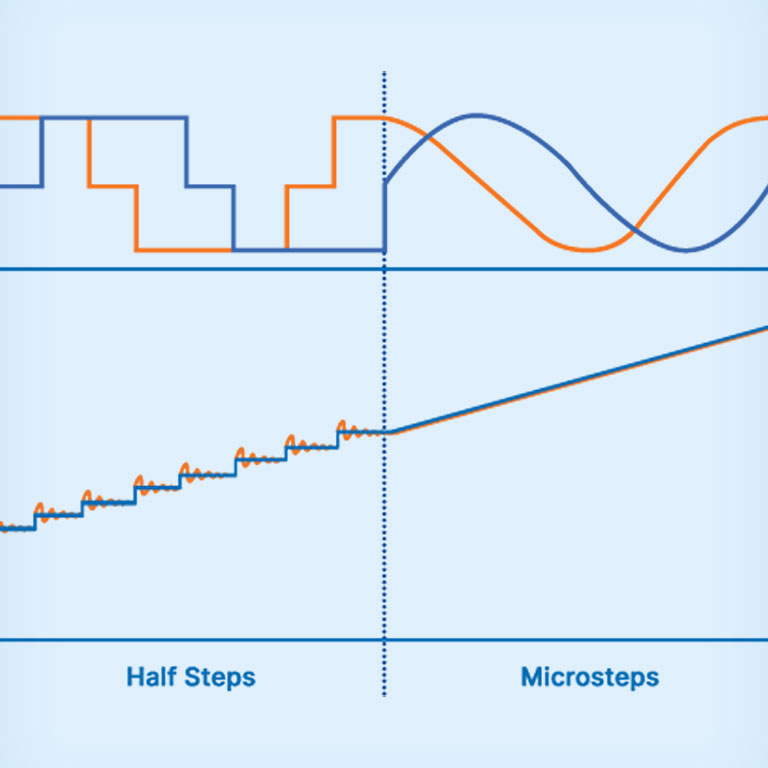
滑らかで高精度な動作のためのマイクロ・ステッピング
ステッピング・モーターは通常、永久磁石のローターと、ステータとして機能するモーター・コイルを使用します。モーター・コイルに電流を流すことで電磁界が生成され、磁気ローターを所定の位置に強制的に移動させます。一般的なハイブリッド・ステッピング・モーターは50組の磁極対を持ち、これによりモーターはフル・ステップが200に近づきます。つまり、360°の完全な回転あたり200の位置決めが可能になります。ただし、ハーフ・ステップやマイクロ・ステップのようなより小さなステップは、追加の電流状態を用いて生成することができます。これにより、モーターの精度、トルク、効率が向上し、ステップ・ロス、振動、騒音が低減されます。

滑らかで高精度な動作のためのマイクロ・ステッピング
ステッピング・モーターは通常、永久磁石のローターと、ステータとして機能するモーター・コイルを使用します。モーター・コイルに電流を流すことで電磁界が生成され、磁気ローターを所定の位置に強制的に移動させます。一般的なハイブリッド・ステッピング・モーターは50組の磁極対を持ち、これによりモーターはフル・ステップが200に近づきます。つまり、360°の完全な回転あたり200の位置決めが可能になります。ただし、ハーフ・ステップやマイクロ・ステップのようなより小さなステップは、追加の電流状態を用いて生成することができます。これにより、モーターの精度、トルク、効率が向上し、ステップ・ロス、振動、騒音が低減されます。
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}