AN-688: Phase and Frequency Response of iMEMS® Accelerometers and Gyros
Introduction
Inertial sensors are often used in applications where phase and frequency response are critical to proper system operation. This application note will discuss the phase and frequency response of the Analog Devices iMEMS accelerometers and gyroscopes (ADXLxxx and ADXRSxxx series components).
General Concepts
In general, the Analog Devices iMEMS inertial sensors frequency and phase response are dominated by their output filter response. Since the output filter is generally defined by external components specified by the user, phase and frequency response can be tailored to the application. This is the result of two architectural features:
- Open loop architecture—In general, no force feedback is used on the sensor beam.
- Relatively high beam resonant frequency beams.
To illustrate this point, Figure 1 shows the phase response from 5 Hz to 80 Hz of an ADXRS150 gyro set to 2 kHz bandwidth. Figure 2 shows the phase response from 5 Hz to 100 Hz of an ADXL203 set to 2 kHz bandwidth. In both cases, one can see that the phase response is essentially flat.

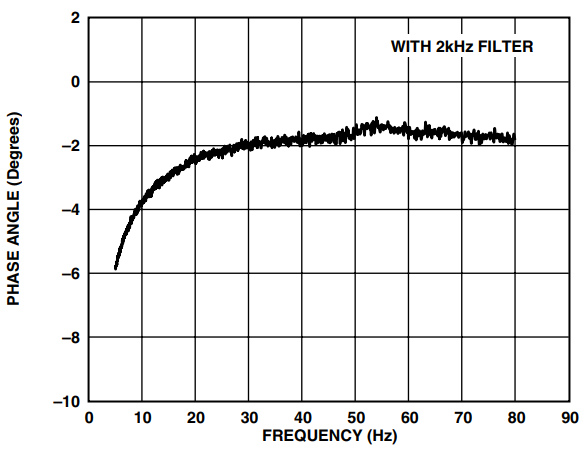
Figure 1. ADXRS150 Phase Response.

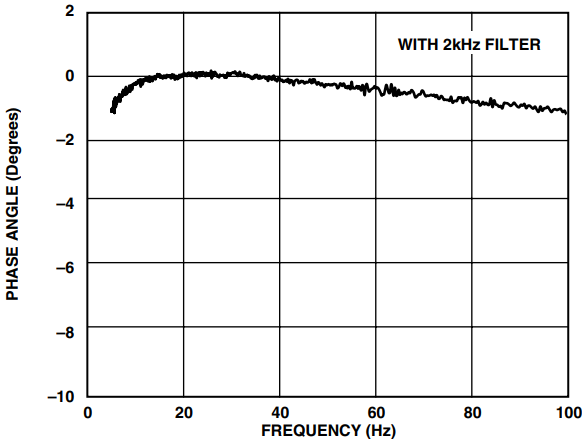
Figure 2. ADXL203 Phase Response.
First-Order Filters
All ADXL series low g (<20 g) accelerometers use a single-pole RC filter where the resistor is internal and the capacitor is external. The user sets the bandwidth, and indirectly the phase response, by his or her choice of capacitor value. The phase response of a first-order (RC) system is defined as
Phase Response = –ARCTAN (wRC)
where:
w = 2 πf
In general, one can assume that a first-order filter has a phase response of –45° at its –3 dB corner frequency.
Figure 3 shows the phase response for a 100 Hz first-order low-pass filter. All ADXLxxx series low g accelerometers, i.e., the ADXL103/ADXL203, ADXL202E/ADXL210E, and ADXL311, will respond identically.

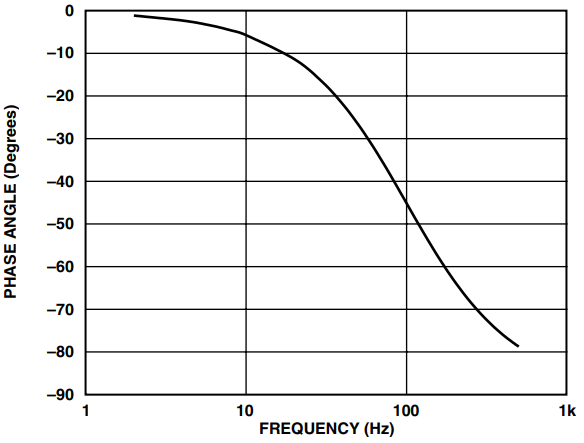
Figure 3. 100 Hz First-Order Low-Pass Filter Phase Response.
The ADXRSxxx series gyros look like they would have 2-pole filter response (two cascaded single-pole filters), but this is not the case. The first pole is the RC filter composed of the parallel combination of RSEN1, RSEN2, and CMID. The purpose of this pole is to inhibit higher amplitude clock artifacts from overloading the output amplifier, so the corner frequency is generally chosen to be fairly high, 10 times the required overall bandwidth (e.g., for a 40 Hz gyro response, one would set the first pole to 400 Hz). The effect of this pole on phase response is, therefore, minimal (approximately –5°).
The second pole is normally used to set the actual bandwidth of the gyro. It is a classic single-pole RC filter (the R is the internal ROUT resistor of 180 kΩ, and the C is the external COUT). The phase response for a 100 Hz bandwidth would be very similar to that of the single-pole accelerometer shown in Figure 3.
Second-Order Filters
All ADXLxxx series high g (>20g) accelerometers use internal 2-pole switched capacitor Bessel filters. Since the filter is totally internal, there is no adjustment or modification that the user can do to modify the phase response.
In general, the phase response for a 2-pole Bessel filter will be less than –10° below 25% of its –3 dB corner frequency and –90° at its –3 dB corner frequency. The phase response for a 400 Hz Bessel filter is shown in Figure 4.

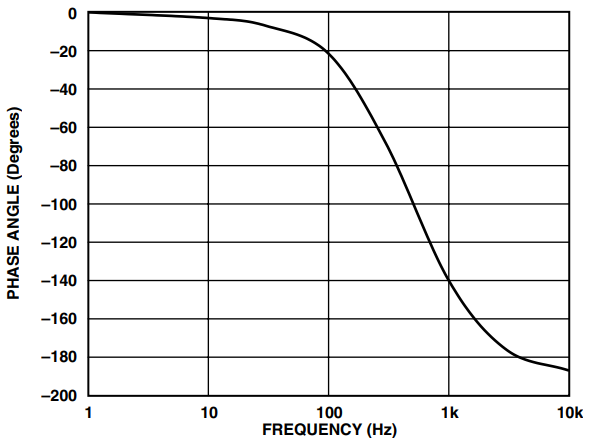
Figure 4. 400 Hz Second-Order Low-Pass Filter Phase Response.
The user may, of course, add an external filter to any of the high g accelerometers. In this case, the external filter’s phase response will dominate that of the internal filter, assuming that the external filter’s cut-off frequency is much lower (more than 10 times lower) than that of the internal 2-pole filter.
Conclusion
The phase response of the Analog Devices iMEMS inertial sensors is essentially determined by the output filter. Most devices have output filters whose corner frequency is determined by user supplied components, so the user can tailor the phase response to their application. Devices with internal filters can be simply modeled as ideal filters.
作者
