CN0317
Overview
Design Resources
Design & Integration File
- Schematic
- Bill of Materials
- Gerber Files
- Layout Files (PADs)
- Assembly Drawings
Evaluation Hardware
Part Numbers with "Z" indicate RoHS Compliance. Boards checked are needed to evaluate this circuit.
- EVAL-AD2S1210SDZ ($130.93) AD2S1210 Evaluation Board
- EVAL-SDP-CB1Z ($116.52) Eval Control Board
Device Drivers
Software such as C code and/or FPGA code, used to communicate with component's digital interface.
AD2S1210 GitHub no-OS Driver Source Code
AD2S1210 IIO Resolver-to-Digital Converter for Python
AD2S1210 IIO Resolver-to-Digital Converter for MATLAB/Simulink
Features & Benefits
- 10-bit to 16-bit Revolver-to-Digital Converter
- High current op amp driver
Documentation & Resources
Circuit Function & Benefits
The circuit shown in Figure 1 is a high performance, resolver-to-digital converter (RDC) circuit that accurately measures angular position and velocity in automotive, avionics, and critical industrial applications where high reliability is required over a wide temperature range. The AD8397 high current driver can supply 310 mA into a 32 Ω load and eliminates the requirement for discrete push-pull buffer solutions.
Common applications of RDCs are in automotive and industrial markets to provide motor shaft position and/or velocity feedback.


(Simplified Schematic: Decoupling and All Connections Not Shown)
Circuit Description
The AD2S1210 is a complete 10-bit to 16-bit resolution tracking RDC, which includes an on-chip programmable sine wave oscillator that provides the excitation for resolvers. Because of harsh operating environments, the AD2S1210 (C grade and D grade) are specified over the extended industrial temperature range of −40°C to +125°C.
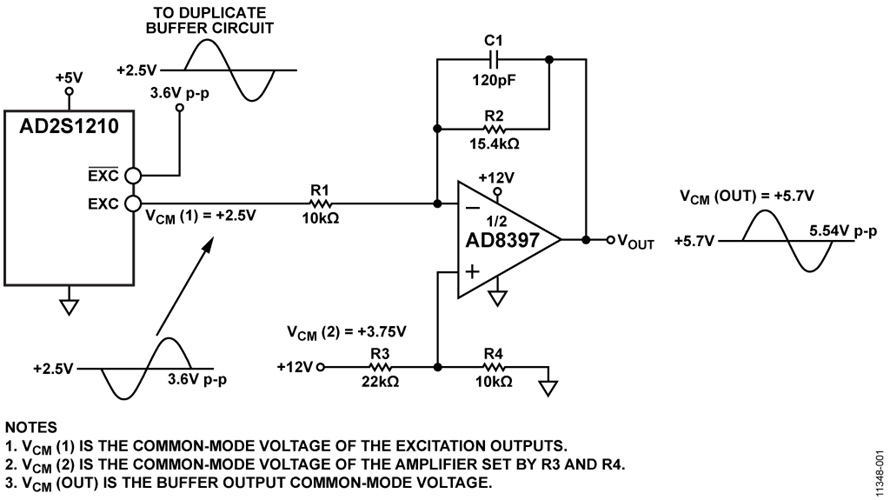
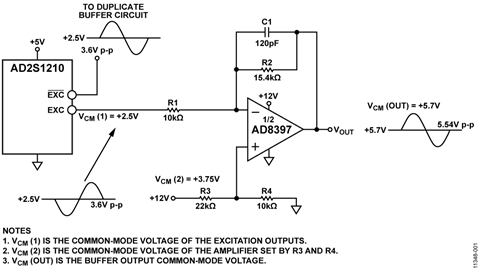
The high current driver shown in Figure 1 uses the AD8397 dual op amp to amplify and level shift the AD2S1210 reference oscillator excitation outputs so that the interface to the resolver is optimized. The AD8397 is a low distortion, high output current, and wide output dynamic range amplifier that is ideal for resolvers. The AD8397 310 mA current drive capability for 32 Ω loads delivers the required power to a resolver without the conventional use of discrete push-pull output stages, which simplifies the driver circuit and consumes less power compared to the additional components required in the conventional push-pull circuitry. A similar driver stage is used for the complementary excitation output to achieve a fully differential signal used in driving the resolver primary winding. The AD8397 is available in a narrow 8-lead SOIC package specified over the industrial temperature range of −40°C to +85°C.
RDCs employ sinusoidal signals to determine the angular position and/or velocity of a resolver that is excited with a sine wave reference signal. The resolver excitation reference signal present on the primary winding is transformed into two sinusoidal, differential output signals: the sine and cosine. The amplitudes of the sine and cosine signals depend on the actual resolver position, the transformation ratio of the resolver, and the excitation signal amplitude.
The RDC simultaneously samples both input signals to provide digitized data to the digital engine, known as a Type II tracking loop. The Type II tracking loop is responsible for the position and velocity calculations. A typical application circuit is shown in Figure 2.
Due to resolver input signal requirements, the excitation buffer must provide a single-ended current of up to 200 mA. The buffer circuit shown in Figure 1 also provides gain to the AD2S1210 excitation output signal, in addition to current drive capability.
A typical resolver has an input resistance in range of 100 Ω to 200 Ω, and the primary coil must be excited with 7 V rms.
The converter accepts input signals in the range of 3.15 V p-p ±27%. The frequency range of the AD2S1210 is specified from 2 kHz to 20 kHz. A Type II tracking loop is employed to track the inputs and to convert the input sine and cosine information into a digital representation of the input angle and velocity. The maximum tracking rate of the device is specified at 3125 rps.
At 16-bit resolution, the position output has a maximum accuracy error specification of ±5.3 arc min.
The AD2S1210 operates on the 5 V supply, and the AD8397 that acts as output buffer circuit requires a 12 V supply to provide the required differential signal amplitude to the resolver.
Figure 1 shows the schematic for the AD2S1210 and AD8397 configured as a differential driver. A very attractive aspect of the AD8397 is that its output can deliver high linear output current when driving heavy loads, up to 310 mA into a 32 Ω load while maintaining a −80 dBc spurious-free dynamic range (SFDR). Due to its high output current, the AD8397 can deliver the required power to a resolver without the need of a discrete push-pull circuit.




The required current to drive the resolver is 200 mA for a 100 Ω to 200 Ω input resistance. The discrete solution shown in Figure 3 provides a push-pull output stage, which not only adds cost to the driver circuit but also consumes a small amount of quiescent power even when there is no signal present.
The buffer stage in Figure 1 reduces power and component count while achieving driving capability that the push-pull circuit offers.
The excitation output of the AD2S1210 typically delivers a 3.6 V p-p sinusoidal signal on the EXC and EXC outputs, which results in a 7.2 V p-p differential signal.The typical transformation ratio of an automotive resolver is 0.286. Therefore, if a unity-gain buffer is used in conjunction with the AD2S1210, the amplitude of the resolver outputs is approximately 2 V p-p differential. Such a signal has insufficient amplitude to meet the AD2S1210 input amplitude specification. Ideally, the sine and cosine inputs have amplitudes of 3.15 V p-p differential; therefore, the AD8397 must provide a gain of approximately 1.5.
The gain of the excitation buffer shown in Figure 1 is set by the R1 and R2 resistors. During the circuit tests, the R1 and R2 resistors had a value of 10 kΩ and 15.4 kΩ, respectively, corresponding to a gain of 1.54.
There are jumper options on the EVAL-AD2S1210SDZ evaluation board to change R2 to 8.66 kΩ, which provides a gain of 0.866. This gain setting delivers 3.12 V p-p differential amplitude signals to the sine and cosine inputs for resolvers with transformation ratios of 0.5.
The R3 and R4 resistors set the common-mode voltage of the amplifier to VCM (2) = 3.75 V. The common-mode voltage of the excitation outputs is VCM (1) = 2.5 V (midsupply), which translates into the buffer output common-mode voltage of approximately VCM (OUT) = 5.7 V (approximately one half the 12 V supply).Because the selected topology can operate on a single supply, the op amp selected for the buffer must also be able to operate with the single-supply rail. The AD8397 operates on a single supply of 12 V and has rail-to-rail outputs, making it an ideal choice.
Measurements
The EVAL-AD2S1210SDZ evaluation board provides jumper options that allow the use of either the integrated driver shown in Figure 1 or the discrete driver in Figure 3.
Figure 4 shows the quality of the signals of the discrete push-pull circuit and the integrated buffer using the AD8397. Using the Rohde & Schwarz RTO1024, a fast Fourier transform (FFT) analyzes the output signal, and the fundamental and harmonics power are measured. The excitation frequency is set to 10 kHz.
With the gain set to 1.54, the AD8397 provides an output signal of 5.54 V p-p in both configurations. The power in the fundamental is approximately 18 dBm into the 50 Ω typical input impedance of the RTO1024.
The signal-to-noise-and-distortion (SINAD) and total harmonic distortion (THD) are then computed from the power values of the fundamental frequency and harmonics of the signal. For the push-pull circuit, SINAD = 50.9615 dB, and THD = 25.66%; for the AD8397 buffer, SINAD = 54.8 dB, and THD = 25.51%. This calculation makes both configurations comparable.


The next step is to prove that AD8397 circuit can still pass the excitation signals even with the presence of a high current at its output. The test setup shown in Figure 5 determines the AD8397 circuit performance by sinking a current at the output.


The AD8397 can deliver a high linear output current of up to 310 mA into a 32 Ω load. Resolver input resistance typically ranges from 100 Ω to 200 Ω.
Figure 6 shows the excitation signals when sinking a current of 310 mA to the AD8397 output. The output is still able to maintain its signal strength and, therefore, able to drive a typical resolver.


If connected to a resolver, the excitation signals from the AD8397 can generate sine and cosine signals within the AD2S1210 input range requirements.
Recommendations
Capacitor C1 in parallel with Resistor R2 forms a low-pass filter to filter out any noise that exists on the EXC and EXC outputs. When selecting the cutoff frequency of this filter, ensure that the phase shift of the carrier caused by the filter does not exceed the phase lock range of the AD2S1210. Note that C1 is not obligatory, because the resolver can filter out high frequency components from the AD2S1210 excitation output.
During the circuit verification process, the outputs of the resolver were directly connected to the AD2S1210 inputs. Often in user applications, additional scaling resistors and/or passive RC filters are used. Additional passive components in front of the AD2S1210 device are acceptable; however, do not exceed the maximum phase lock range of the AD2S1210 as specified in the product data sheet. External passive components can result in amplitude mismatch error between the channels, which directly translates into position error. For this reason, it is recommended that at least 1% tolerance resistors and 5% tolerance capacitors be used in the signal path.
The values of the components surrounding the AD2S1210 and AD8397 can be modified to meet the specific requirements of the application and sensor. For example, by modifying resistor values, the user can scale the bias voltage, amplitude, and maximum drive capability on the output of the buffer circuitry.
Circuit Evaluation & Test
The EVAL-AD2S1210SDZ evaluation board is used to evaluate and test the AD2S1210 with the CN-0317 circuitry. A detailed schematic, layout, and bill of materials are available in the CN-0317 Design Support Package.
The EVAL-AD2S1210SDZ user guide provides complete instructions on using the hardware and software for the evaluation board.
Equipment Needed
The following equipment is needed:
- A PC with a USB port and Windows® 7 or later
- The EVAL-AD2S1210SDZ evaluation board
- The EVAL-SDP-CB1Z SDP-B controller board
- The EVAL-AD2S1210SDZ evaluation software
- A 9 V wall wart dc power supply (supplied with the EVAL-AD2S1210SDZ evaluation board)
- A resolver (such as the Tamagawa TS2620N21E11)
Getting Started
To set up the circuit evaluation, take the following steps:
- Install the evaluation software supplied on the included evaluation software CD. Ensure that the EVAL-SDP-CB1Z board is disconnected from the USB port of the PC while installing the software. The PC may need to be restarted after the installation.
- Ensure that the various link options are configured as shown in Table 2 of the EVAL-AD2S1210SDZ user guide.
- Connect the SDP board to the evaluation board, as shown in Figure 7.
- Connect the 9 V power supply adapter included in the kit to Connecter J702 on the evaluation board.
- Connect the SDP board to the PC via the USB cable.
- Launch the evaluation software from the Analog Devices subfolder in the Programs menu.
- Connect the EXC, EXC, SIN, SIN, COS, and COS wires of the resolver to Connector J5 and Connector J6, as shown in Figure 7.


Test
When USB communications are established, the EVAL-SDP-CB1Z can send, receive, and capture parallel data from the EVAL-AD2S1210SDZ.
Figure 8 shows the evaluation software output display for the Acquisition tab when using the circuit to measure position and velocity.
Figure 9 shows a photograph of the EVAL-AD2S1210SDZ evaluation board connected to the EVAL-SDP-CB1Z board.
Complete information and details regarding test setup and calibration and how to use the evaluation software for data capture can be found in the EVAL-AD2S1210SDZ evaluation board user guide.



