





概览
设计资源
设计与集成文件
- Schematic
- Bill of materials
- Gerber files
- Allegro layout files
- Assembly drawing
评估硬件
产品型号带"Z"表示符合RoHS标准。评估此电路需要下列选中的电路板
- EVAL-ADICUP3029 ($60.92) ADuCM3029 Arduino Form Factor Compatible Development System
- EVAL-CN0415-ARDZ ($175.96) Robust Soleniod Measurement and Drive System
参考资料
-
CN0415 User Guide2019/3/13WIKI
-
cn-cn0415:适用于电磁阀执行器的稳健闭环控制与监测系统 (Rev. 0)2019/3/1PDF625 K
电路功能与优势


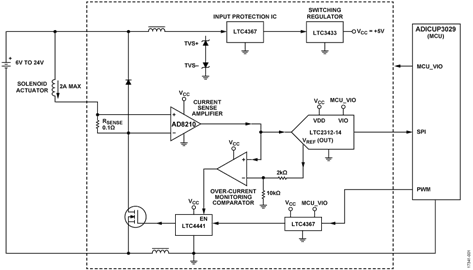
图1所示简化电路图是一种用于精确有效地驱动比例式和双态电磁阀执行器的稳健解决方案。应用包括运动控制、闩锁、夹具、制动器、离合器、比例式气阀和比例式液阀。
在双态电磁阀应用中,该电路提供精确的闭环电流控制,允许在很宽的电源电压范围内使用低压电磁阀。初始吸合电流、吸合时间延迟和保持电流可独立调节,大大降低了电磁阀持续通电的应用中的功耗。
对于比例阀应用,该电路提供完整的驱动器解决方案;脉冲宽度调制(PWM)占空比和频率可通过外部PID控制器直接控制,并且可启用一个具有可编程频率和幅度的扰动电流来减少机械静摩擦。
高压分流监控器测量电磁阀瞬时电流,然后将其数字化以进行软件控制。满量程电流为2.0 A,可通过更换单个分流电阻来修改。冗余过流保护电路持续监控电磁阀电流,跳闸时锁定并通知控制器,从而在发生硬件或软件故障时保护电磁阀。电源输入电路包括对高达60 V的过压事件和-40 V的反向电压的保护,电源仅在6 V至24 V的有效窗口内使能,确保电源瞬变状况下(例如冷起动期间的欠压或电源切断引起的过压)的操作可预测。
电路描述
电磁阀执行器基础知识
典型电磁阀执行器的电气特性主要为感性和阻性。施加于电磁阀执行器上的电压引起一个电流以电压/电感(V/L)的初始斜率斜坡上升,最终达到电压/电阻(V/R)的稳态电流。这种V/L/R特性是电磁阀通电时电流不会立即达到最大值的主要原因。电磁阀以集中磁场的形式储存能量。只要导线中有电流流动,导线周围就会产生磁场。当导线缠绕成线圈时,例如螺线管,磁场就会集中起来。这种电磁铁可以通过电信号控制机械阀。PWM可用来降低施加于电磁阀的有效电压(从而控制电磁阀电流),有效电压表示如下:
V × 占空比
一般而言,电磁阀基本上由缠绕在圆柱形管上的电线圈组成,铁磁性执行器或柱塞可自由移动或滑入滑出线圈主体,如图2所示。


电磁阀电枢上的力大致与电流成正比,与电枢和磁芯之间的间距的平方成反比。因此,双态电磁阀通常有一个线性响应的复位弹簧(或没有复位弹簧),而比例式电磁阀使用非线性弹簧,使得电枢位移与电磁阀电流成比例。电枢运动确实会影响电磁阀电流(如图3所示),但这种运动通常不会对电路运行产生重大影响。


电流检测
测量电磁阀电流是一项特别具有挑战性的任务,尤其是涉及PWM技术时。该系统使用一种由高边电流检测和低边开关组成的拓扑。在这种情况下,PWM控制开关以地为基准。感性负载(电磁阀)直接连到电源,一个分流电阻置于开关和负载之间(参见图4)。


将采样电阻放在高边的好处是可以测量全部电流,包括循环电流,因为当开关断开时,采样电阻仍在环路内。此外,高边采样电阻可以检测短路接地,从而增强诊断能力。
在这种配置中,检测电阻的共模电压在地(当MOSFET导通时)和输入电源以上0.4 V(当MOSFET关断时)之间摆动。 AD8210是一款单电源差动放大器,非常适合在有大共模电压的情况下放大小差分电压。采用5 V单电源供电时,工作输入共模电压范围为−2 V至+65 V。放大器的增益为20V/V,由内部精密低漂移电阻设置;从最大输入满量程范围250 mV峰值可产生5 V输出电压。AD8210输出计算公式如式1所示。

满量程设计电流为2 A;0.1Ω检测电阻产生4 V输出,略低于ADC的4.096V满量程输入。
检测电阻功率额定值必须支持满量程电流。对于2 A设计电流,功耗为

本设计采用1 W电阻,安全裕度为2.5。


AD8210 -3 dB带宽为450 kHz,可为高达45 kHz的PWM频率提供足够的带宽。AD8210输出由过流保护电路直接监测。图5所示为AD8210输入端的一阶低通滤波器,其有助于在数字化之前减小电流检测信号的纹波。截止频率f-3db由式3确定。

其中:
RFILTER = 50 Ω 和 R5
CFILTER = 4.7 μF 和C2,产生一个677 Hz的截止频率
信号路径中含有一个额外的RC低通滤波器,默认情况下它被旁路。
ADC数据采集
电磁阀电流由 LTC2312-14(一款14位500 ksps采样ADC)数字化。LTC2312-14有一个集成式基准电压源,对于3.3 V或5 V的电源电压,它可将输入范围自动优化至2.048 V或4.096 V。
内部基准电压源阻抗很低(典型值为1 Ω),故其可用于其他电路而无需额外缓冲。EVAL-CN0415-ARDZ使用ADC的基准电压源来精确设置过流阈值,它还可以用来将电流监控器的偏移设置为半量程。对于精度要求不太严格的应用,可将电磁阀电流连接到微控制器的模拟输入。
FET驱动器
脉冲宽度调制(PWM)是一种通过完全打开和完全关闭电源,改变导通时间与关断时间的比率,从而改变直流电源电压的方法。导通时间与周期(导通时间和关断时间之和)之比为PWM信号的占空比。
占空比为50%时,电压在50%的时间内开启,在剩余的50%时间内关闭。因此,时间平均电压为直流输入电源电压的50%,通过电磁阀的电流成比例地减少。此外,电磁阀的电流仅为最大电流的50%。尽管某些应用中PWM信号的频率(周期的倒数)是可变的,但它常常设置为固定值。对于给定应用,常常有一系列频率是有效的,其标准如下:
- PWM频率应远大于系统/执行器的机械响应
- PWM频率应足够低,以防开关损耗过大
与CN-0415一起使用的EVAL-ADICUP3029平台板内置PWM生成外设。控制器的输出不能直接驱动开关MOSFET——3.3V的逻辑高电压不足以充分增强MOSFET,驱动强度不足以快速切换MOSFET,导致MOSFET变到饱和状态,因而功耗增加。
LTC4441 N-MOSFET栅极驱动器解决了这些问题,在6 A电流下提供高达8 V的栅极驱动电压,能够快速切换MOSFET并将损耗降至低点。逻辑输入与TTL兼容,并可直接连到3.3 V CMOS逻辑。当电源电流小于12μA时,双功能控制输入可用来禁用驱动器或强制芯片进入关断模式。当激活时,欠压闭锁和过温保护电路会禁用驱动器输出。
过流保护电路
正常工作时,电磁阀电流由软件控制。纳入一个故障安全过流电路是明智的,以防软件故障或失效。故障检测信号既可以是中断驱动的,也可以在比例积分微分(PID)环路中检测。
CN-0415通过一个带输出锁存器的 LT1671 精密比较器来连续监视AD8210输出,从而实现此PID控制环路。过流阈值由R14和R15设置,这两个电阻形成一个由LTC2312-14的4.096V基准电压驱动的电阻分压器(参见图6)。式4是跳闸电压的表达式,其默认设置为3.41 V,对应于1.7 A的电磁阀电流。

发生过流状况时,比较器输出禁用LTC4441和锁存器。输出也被连接到微控制器通用输入/输出(GPIO)引脚,以便软件可以检测到这种状况并采取相应措施。故障清除后,比较器可以通过Q3栅极的上升沿复位。图6中使用的是上升沿检测器,而不是电平敏感复位,因为软件故障可能使复位信号保持在高电平。


电源和保护
LTC4367 过压、欠压和反向电源保护控制器提供稳健的电源输入保护。LTC4367控制一对外部N沟道MOSFET的栅极电压,确保输出保持在安全工作范围内,从而保护电源输入电压可能过高、过低甚至为负的应用。32 ms的开启延迟也会阻止50 Hz或60 Hz AC。LTC4367可承受-40 V至+100 V之间的电压,工作电压范围为2.5 V至60 V,正常工作时仅消耗70μA电流。
LTC4367包括两个精密比较器,用于监视VIN的过压和欠压状况。如果输入电源上升到用户可调过压阈值以上,则外部MOSFET的栅极快速关断,从而断开负载与输入的连接。同样,如果输入电源低于用户可调欠压阈值,则外部MOSFET的栅极快速关断。
过压(OV)/欠压(UV)电阻值由表1所示的以下参数确定。
| 参数 | 值 |
| VOS | 3 mV |
| ILEAK | 10 nA |
| UVTH | 2.2 V |
| OVTH | 24 V |
相关的数据表公式如式5至式7所示。

产生的分压器值如表2所示。
| 电阻 | 值 |
| R4 | 272.5 kΩ |
| R5 | 27.5 kΩ |
| R8 | 1.02 MΩ |
工业、汽车和电池供电应用常常会使电路受到各种瞬态状况的影响,包括电源切断和冷起动。在汽车应用中,若在通过交流发电机充电的同时断开电池,就会发生电源切断,导致电源电压迅速提高。冷起动发生在起动发动机(或其他高负载状况)时,电池中会产生电压降(低温下更严重)。 LT3433电流模式开关稳压器可以处理这些情况,因为它使用单个电感,能提供升压和降压调节。该电路工作在4 V至60 V输入电压范围内,适用于各种宽输入电压范围应用。


图7显示了一个高压升压/降压DC-DC转换器开关稳压器电路,其为放大器和数字转换器提供稳定的5 V电压输出电源。
系统功耗
系统消耗的静态电流的估计值约为13 mA,或大约180 mW,如表3所示,这与系统消耗电流的仿真值相当;仿真情况下电压输入电源(范围为6 V至24 V)设置为12 V。
| IC器件 | VSUPPLY (V) | IQ1 (A) | 瓦 (W) |
| AD8210 | 5 | 0.002 | 0.01 |
| LTC4441 | 24 | 0.006 | 0.144 |
| LT1671 | 5 | 0.001 | 0.005 |
| LTC4367 | 24 | 0.00009 | 0.00216 |
| LT3433 | 5 | 0.00094 | 0.0047 |
| LTC2312-14 | 5 | 0.003 | 0.015 |
| 总计 | N/A2 | 0.01303 | 0.18086 |
| 1 IQ为静态电流。 2 N/A表示不适用。 |
|||
数字PID控制
PID控制回路可以精确控制电磁阀电流,补偿电源电压和线圈电阻的变化。对于双态电磁阀,这种工作模式可提供最佳驱动电流,使功耗较低。还有一个附加功能,它允许在短时间内施加一个较高的初始吸合电流,之后电流回落到较低的保持电流。
对于PID控制器的数字实现,PID控制器的标准形式必须离散化。离散化PID控制器用式8表示,其中Kp、Ki和Kd应首先用正确的值进行调谐。

有关软件例程的完整信息和细节,请参阅 CN-0415 软件 wiki。
常见变化
需要低失调漂移并在电流检测放大器的较低电压输入下工作的系统,AD8418可以代替AD8210。AD8418放大器具有0.1μV/°C失调漂移,可在2.7 V至5.5 V范围内工作,故AD8418更适合便携式应用。
电路评估与测试
下面概述CN-0415电路设计的测试程序和结果的收集。有关硬件和软件设置的更多信息,请访问CN-0415用户指南以获取完整详情。
测试所需设备
- 带USB端口和Windows® 7或更高版本的PC
- EVAL-CN0415-ARDZ 电路评估板
- EVAL-ADICUP3029评估平台或等效接口
- CrossCore® Embedded Studios(交互式开发环境(IDE))
- 电源:6 V至12 V台式电源或等效电源
开始使用
按照CN-0415用户指南中的说明,将示例代码加载到CrossCore Embedded Studios IDE中。
功能框图
图8所示为测试设置的功能框图。该测试需要6 V至25 V的电源和作为系统负载的电磁阀执行器。


设置
连接EVAL-CN0415-ARDZ,利用Arduino兼容接头和对应接头将其安装在EVAL-ADICUP3029板上方,如图9所示。


测试
创建示例代码并将其加载到EVAL-ADICUP3029中,安装EVAL-CN0415-ARDZ并连接电磁阀执行器,然后器件与PC通信,通过UART将代码写入器件中。利用为评估目的而提供的不同命令行测试电路,例如PWM频率、占空比以及执行器的电流负载等。
有关测试设置以及如何组合使用软件和硬件的完整信息和细节,请参阅CN-0415用户指南。有关EVAL-ADICUP3029板的更多信息,请参阅EVAL-ADICUP3029用户指南。
该系统使用12 V电磁阀执行器进行测试,其电感为20 mH,直流电阻为12 Ω。使用的执行器为直流推挽式电磁阀。它采用12 V电源供电,在50%占空比下可产生6牛顿(N)力。注意,为了测试电气性能,可以使用电感作为替代负载。图10显示了AD8210的实际电压输出。


PWM驱动器精度测试
PWM信号由微控制器产生并经过几个有源器件,这些器件会使占空比发生一定程度的失真。图11显示了数个PWM频率的实测PWM误差与占空比的关系。结果表明,在高PWM频率和低占空比时,失真引起的误差更明显。这种影响在闭环电流控制工作模式中不太重要,因为来自ADC的精确反馈会校正该误差。


闭环系统测试
该系统也在闭环电流模式下进行了测试。在闭环电流工作模式中,误差以反馈路径中的元件为主,包括电流检测电阻、电流检测放大器和带内部基准电压源的ADC。PWM失真、电源电压的变化和电磁阀线圈的温度系数引起的误差全都被校正。


各种PWM频率的满量程误差与编程电流的关系如图12所示。增益误差范围最多约为2.8 mA,失调最多为3 mA(约为满量程的0.5%)。示例软件包括校准例程,它能校准初始误差,使得残余误差小于1 mA(约为满量程的0.16%)。