资源库
AN-1131: AD7190、AD7192、AD7193、AD7194和AD7195的斩波
简介
斩波是一种用于降低失调误差、失调误差漂移和其它低频误差的技术。本应用笔记说明如何实施斩波以及斩波的好处。
失调误差
失调电压误差会在信号处理链的许多地方出现,例如:当两种异质金属接合时,会产生与温度相关的热电偶电压。在ADC等集成电路内部,存在许多失调误差源,例如:仪表放大器引起的失调,采样开关闭合时注入采样电容的电荷,以及电磁辐射干扰。这些失调一般是不受欢迎的,如果它们随温度而变化,则还会带来麻烦,因此一次性校准不足以消除整个温度和电源范围内的失调误差。
斩波
在Σ-Δ调制器的各种放大器内部产生的失调,一般可以通过本地斩波或放大器的自稳零机制消除。但是,这些方法无法消除其它失调误差。这些ADC采用的解决方案是对ADC内部的整个模拟信号链进行斩波,消除所有失调和低频误差,使得失调误差和失调误差漂移极小。斩波方案如图1所示。
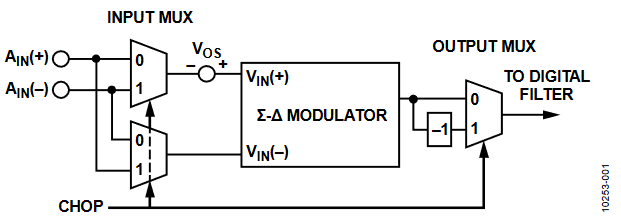
图1. 斩波
调制器的差分输入在输入多路复用器上交替反相(或斩波),针对斩波的每个相位执行一次ADC转换。调制器斩波在输出多路复用器中反转,然后送入数字滤波器。
如果Σ−Δ调制器的失调表示为VOS,则斩波为0时的输出为:
(AIN(+) − AIN(−)) + VOS
斩波为1时的输出为:
−[(AIN(−) − AIN(+)) + VOS]
在数字滤波器中对以上两个结果求平均值可以消除误差电压VOS,得到:
(AIN(+) − AIN(−))
它等于无失调项的差分输入电压。
结果/校准
其结果是消除ADC内部的任何失调误差,还有更重要的,是将因温度引起的任何失调漂移降至最小。这些ADC的典 型漂移为±5 nV/℃。事实上,如此小的漂移几乎无法测量。从输入多路复用器到调制器输出的整个模拟电路都被斩波,因而不需要ADC失调校准。
ADC的典型失调误差为±0.5 μV,其测量方法是将0 V外部电压施加于安装到PCB插槽中的器件。因此,该误差大部分是各种触点(PCB走线、焊点、引脚架构、焊线、芯片金属化等)所用不同金属引起的热电偶误差。
了解阶跃响应
ADC需要针对斩波= 0和斩波= 1执行转换,因此ADC的第一个输出需要两个转换周期 (2 × tADC) ,建立时间为两个 转换周期。后续输出只需要一个转换周期 (tADC)。
两次转换的延迟发生在通道改变后、PGA改变后或ADC工作模式改变后(例如,发生在退出关断模式之后,因而不会产生中间/无效输出——通道改变后的第一个输出100%建立至新通道电压)。
如果模拟输入由于ADC的外部原因发生阶跃变化,例如传感器输出突然改变或外部多路复用器切换,ADC不会自动检测到已发生变化,它产生的输出为新输入与旧输入的加权平均值,除非在外部多路复用器切换时中断转换器,然后重新启动ADC以开始全新转换,此时它将 2 × tADC 后产生一个输出。
输入信号发生变化后,ADC产生中间值是正常现象,这种行为与模拟滤波器相同。如果模拟低通滤波器的输入发生阶跃变化,在一定时间内,输出反映的是旧模拟输入与新模拟输入的组合值。只有经过足够数量的时间常数后,滤波器的输出才能完全反映新输入值。
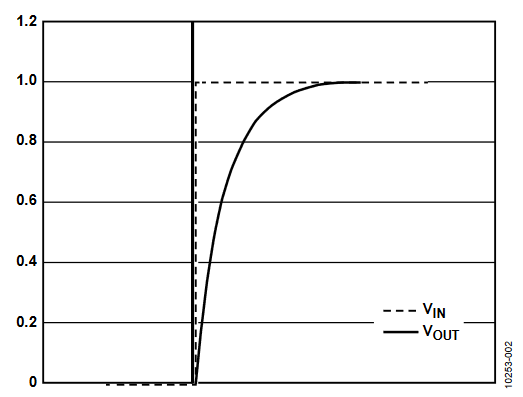
图2. 模拟滤波器阶跃响应
这些Σ-Δ型ADC内置一个具有确定3 dB频率和建立时间的低通滤波器,因此,虽然脉冲/阶跃响应的持续时间有限,但其离散时间响应相似。
对于这些ADC,唯一可能出乎意料的特性是模拟输入发生变化后,可能会产生两个中间输出(禁用零延迟模式)。这是斩波导致的后果,斩波ADC输出等于当前ADC转换结果与前一转换结果的平均值。
如果模拟输入在ADC转换周期的中途发生变化,则当前ADC转换结果反映的是旧模拟输入和新输入的组合值,平均结果为中间输出。
下一个(非平均)转换结果精确反映新输入。然而,与前一转换结果平均时,它还无法给出最终值,因此产生第二个未建立的输出。只有第三个输出才是完全建立的(见图3)。
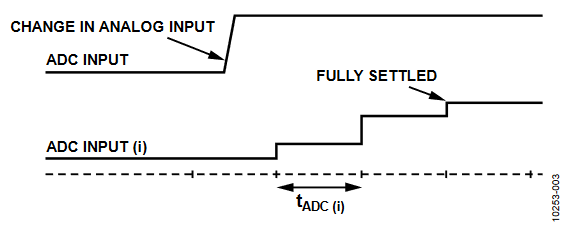
图3. 模拟输入电压的异步变化
输出数据速率
这些ADC内置一个 sinc3滤波器和一个 sinc4 滤波器。滤波器通过Single位选择。滤波器阶数会影响ADC提供的输出数据速率。关于不同滤波器选项对应的输出数据速率和建立时间,请参阅应用笔记AN-1084。
频率响应
斩波也会影响频率响应,不过这种影响大部分时候是有利的。平均操作会在响应中的 fADC/2 奇数倍数处设置陷波, fADC为输出数据速率。这些陷波可以改善50 Hz/60 Hz抑制性能。例如,如果输出数据速率为12.5 Hz并且选择 sinc4滤波器,则sinc滤波器会设置50 Hz的陷波,而斩波则会设置56.25 Hz的陷波。56.25 Hz的陷波可提供60 Hz抑制。
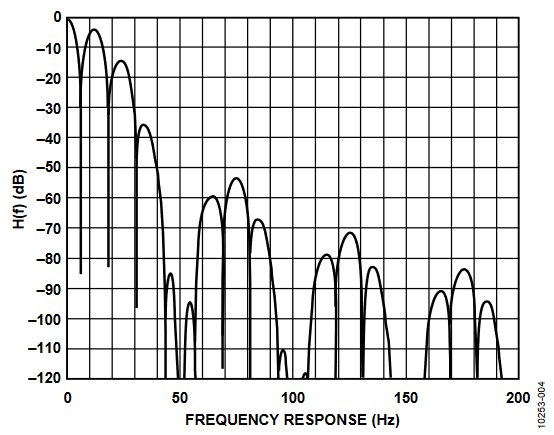
图4. 频率响应(Sinc4、12.5 Hz输出数据速率、REJ60 = 0)
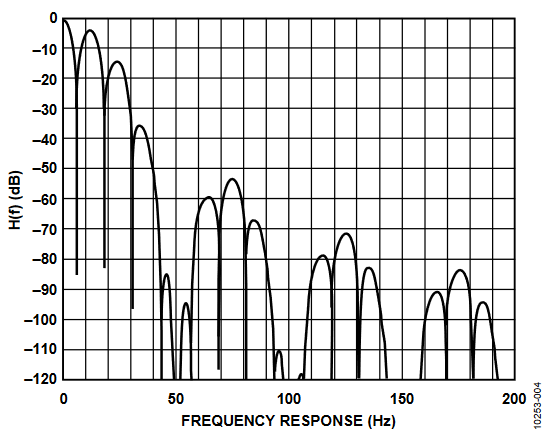
图5. 频率响应(Sinc4 、12.5 Hz输出数据速率、REJ60 = 1)
如果位REJ60设为1,则一阶陷波位于60 Hz,可以改善50 Hz/60 Hz抑制性能。
表1列出了选择 sinc3 或 sinc4滤波器、在REJ60 = 0和REJ60 = 1两种情况下实现的抑制性能。
| Sinc滤波器阶数 | Sinc3 | Sinc4 |
| FS[9:0] | 96 | 96 |
| 输出数据速率 | 16.6 Hz | 12.5 Hz |
| 50/60 Hz 抑制 (±1 Hz) REJ60 = 0 REJ60 = 1 |
53 dB 73 dB |
63 dB 83 dB |
均方根噪声
作为斩波的一部分而执行的均值操作可以降低均方根噪声。噪声性能提高√2倍,相当于峰峰值分辨率和有效分辨率提高0.5 LSB。
结束语
斩波的主要作用是消除失调误差。对于ADI公司的这些ADC,斩波可以出色地消除失调。此外,斩波还能带来其它好处,例如:降低均方根噪声,以及在滤波器响应中设置额外的陷波用于50/60 Hz抑制。
作者
