イヤフォンを使った光学式心拍数測定
センサー技術の進歩は、バイタル測定や健康診断の方法と場所を一変させました。携帯型の非侵襲式測定手法によって、日常生活を送りながら素早く簡単に測定を行うことが可能となりました。ただし、フィットネス産業においてはこのような診断技術がごく一般的になったとはいえ、その精度には限界があり、これを克服できたのはつい最近のことです。
フィットネス・トラッカーを使用すれば、心拍数をはじめとするバイタルを測定可能で、運動メニューを作るのに役立ちます。多くの場合、これらの装置には、動作パターンを検出して歩行、ランニング、水泳などの動作を識別するモーション・センサーが組み込まれており、歩数計として使用することができます。日常生活において無理なく使いやすいように、通常、測定には手首が使われます。これは、腕時計、宝飾品類、リスト・ストラップなどのアクセサリーにセンサーを組み込むことができるからです。しかし、測定品質を考えると、この位置が最適というわけではありません。心拍数の検出はモーション・アーチファクトによって制限され、筋肉の質量が比較的大きいことから動脈へのアクセスも制限されるため、測定が難しくなります。
一方、耳は光学式心拍数測定にはるかに適しています。医療専門家は、既に血中酸素濃度の測定に耳たぶを利用しています。ただ、今のところこの方法はコンスーマ・レベルで利用されるには至っていません。耳を利用する測定機器では、スペース的に制約があり、消費電力が非常に大きいためバッテリも大きいものが必要になるからです。これに対し、アナログ・デバイセズは高集積かつ低消費電力のチップを導入することで、これらの問題を解決するソリューションを開発しました。現在では、実用型のバイタル・サイン測定デバイスを標準的なイヤフォンに組み込むことが可能となっています。応答性が向上したことで、全く新しい領域のアプリケーションが見い出され、可能性への道が開かれています。本稿では、このシステムの説明と評価を行います。
基盤をなす測定方法は、光学的性質を利用するものです。測定には、最大3個のLEDが発する短いパルス信号を使用します。最大LED電流は、最小パルス幅1µsで370mAです。LEDの最適波長は、測定位置と測定方法に従って選択します。手首の場合、測定できるのは浅動脈だけなので緑色の光を使いますが、耳の場合は、赤外線や、より大きい測定深度とより高いS/N比の光を使用することもあります。反射光の測定にはフォトダイオードを使用しますが、フォトダイオードの受感部面積は感度と直接的な関係にあります。また、フォトダイオードは、信号と背景ノイズの両方を測定します。S/N比を向上させるため、下流側にアナログ・フロント・エンドを設けます。これは信号フィルタとして機能し、検出された信号を電圧に変換して、最終的にデジタル形式に変換します。アルゴリズムには、反射測定の他に、加速度センサーを使ってモーション・アーチファクトをフィルタで除去するための修正機能が含まれます。
測定システムの部品は次のとおりです。アナログ・デバイセズのADPD144RIチップをアナログ・フロント・エンドとして使用し、更にフォトダイオードとLEDを組み込みます。測定は3軸加速度センサーの補助を受けますが、このセンサーは歩行や動作の認識だけでなく、アーチファクトの除去にも使われます。この例ではADXL362モデルを使用しました。プロセス全体はADuCM3029マイクロプロセッサで制御しますが、このプロセッサは各種センサーとのインターフェースとして機能し、そのアルゴリズムを格納しています。
標準的なイヤフォンに光学センサーと加速度センサーを組み込んだテスト・システムを図1に示します。このシステムでは、消費電力をできるだけ小さくするためにADCのサンプリング・レートを100Hzに制限し、LEDの輝度を最小限に抑えるよう注意が払われています。


図1. 光学センサーおよび加速度センサーを組み込んだシステムと、比較用のスケール。
システムの特性評価のために、動作パターンの異なる5つのシナリオを考え、評価には光学信号のみを使用しました。これによって、パルス測定が不正確になるのはどのシナリオなのか、またパルス測定の精度向上のために加速度センサーのデータが必要になるのはどの時点なのかを評価することができます。各シナリオは、以下の動作シーケンスで構成されます。
- 佇立状態
- 佇立状態で咀嚼
- デスクで作業
- 歩行
- ランニングとジャンプ
テスト・シナリオ1
佇立状態
サンプリング・レートに対する振幅をプロットした未加工データのスペクトラムを図2に示します。時間に対する脈拍数は、ピーク値によって確認できます。動作がない状態では信号が非常にクリアで、ピーク位置と既知のサンプリング・レートから心拍数を知ることができます。

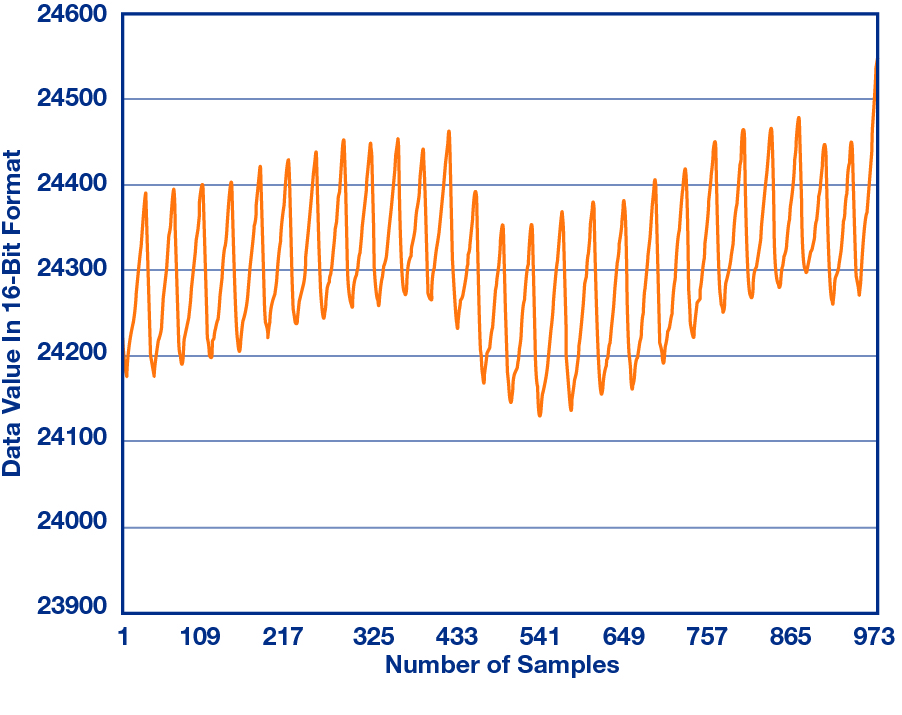
図2. 振幅オーバーサンプリング・レートの測定で心拍数の情報が得られます。
光学センサーは、それぞれ4つのチャンネルを持つ2色のLED(赤外線と赤色光)で心拍数を記録します。これにより、2つのカラー・チャンネルを使用して異なる測定値を得ることができ、より信頼性の高い測定結果を選択可能です。いくつかのチャンネルの信号を図3Aに示します。2個のチャンネルは飽和状態ですが、6個のチャンネルを使用することで、明確に特定された信号を識別することができます。信号の強度と信頼性を高めるために、アルゴリズムはそれぞれの未飽和チャンネルを追加して心拍数を計算します。赤色光チャンネル(上側)と赤外線チャンネル(下側)の心拍数と共に、カラー・スケールで示した測定の信頼度を図3Bに示します。同時に心拍数の倍数も示されていますが、オリジナル信号(破線)はサンプリング・レートと信頼度表示によって見分けることができます。

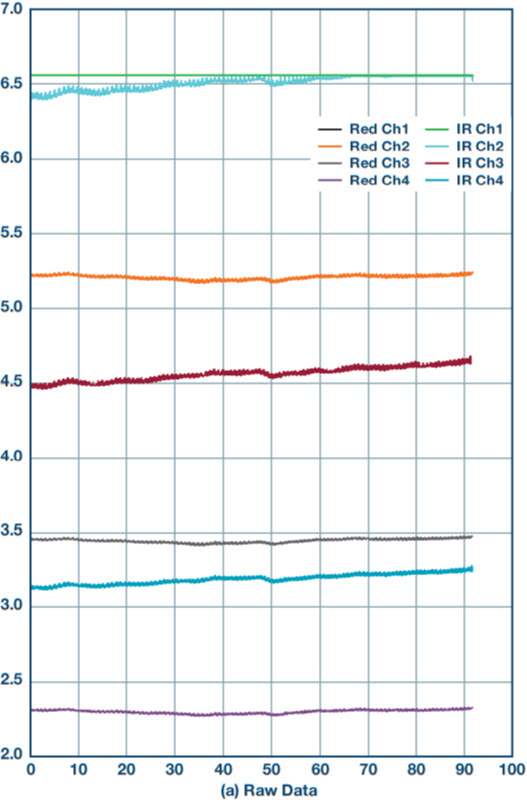

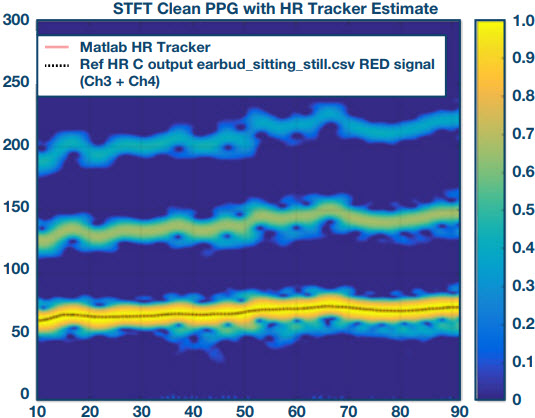

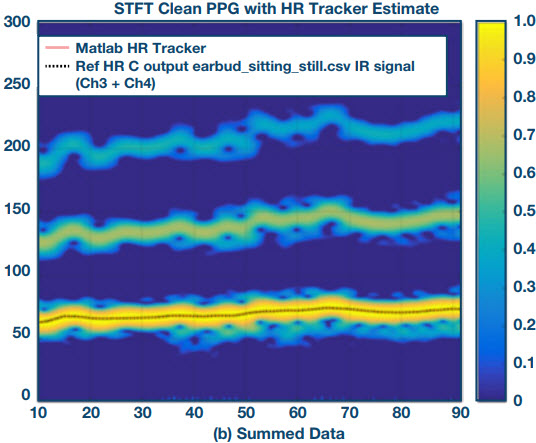
図3. 赤色光領域(上)は佇立状態での4チャンネル測定を示し、赤外線領域(下)は未加工データと合計データを示します。心拍数(黒線)は、アルゴリズムにより合計データから決定できます。カラー・スケールは信頼度を示します。
以上からわかるように、動作がない状態では信号強度が高く、測定を妨げるノイズもないので、アルゴリズムは高い信頼度で心拍数を決定することができます。信号強度は、赤外線チャンネルのほうが赤色光チャンネルよりも高くなっています。
テスト・シナリオ2
佇立状態で咀嚼
シナリオ2では咀嚼という動作が追加されます。記録されたスペクトラムを図4に示します。テスト・シナリオ1と違って明らかなモーション・アーチファクトが現れており、これがジャンプという形で信号に反映されています。これらは各チャンネルの合計でも明らかになっていますが、レートにさほど明確な違いは見られません。しかしアルゴリズムは、モーション・センサーの力を借りなくても、高い信頼度で心拍数を正しく決定することができます。興味深いのは、ここでも赤外線信号の強度が赤色光チャンネルの強度より高いことです。

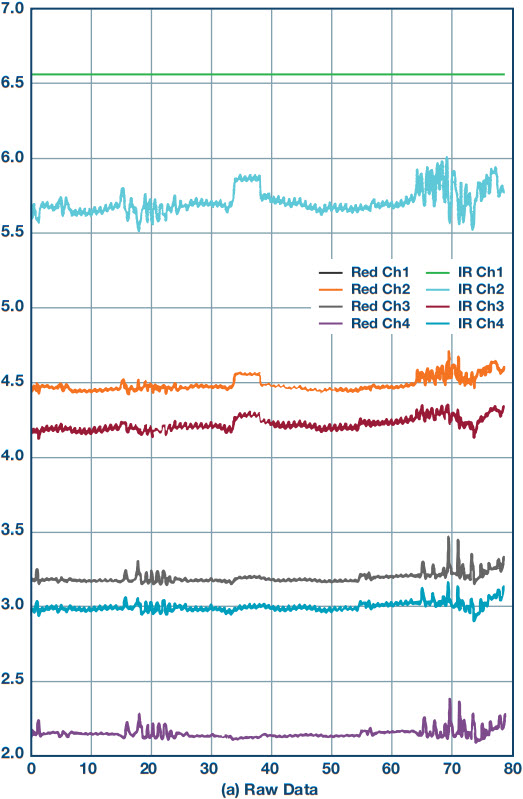

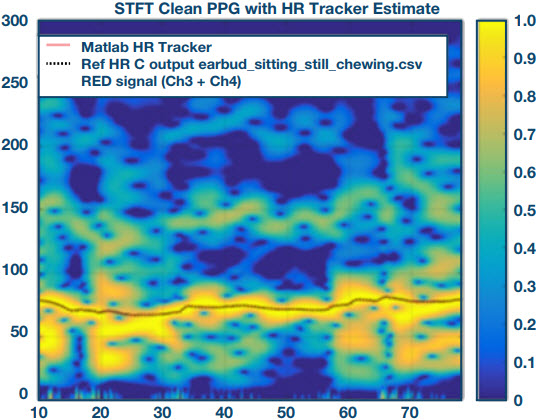

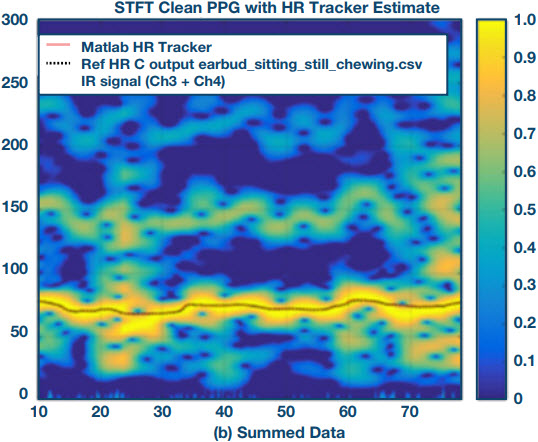
図4. 赤色光領域(上)は佇立状態で咀嚼での4チャンネル測定を示し、赤外線領域(下)は未加工データと合計データを示します。心拍数(黒線)は、アルゴリズムにより合計データから決定できます。カラー・スケールは信頼度を示します。心拍数は加速度センサーなしで決定できます。
テスト・シナリオ3
デスクで作業
シナリオ3では、もう1つ日常的な状況をテストします。被験者はデスクにつき、通常の作業とそれに伴う動作を行います。この場合もシナリオ2と同様にモーション・アーチファクトが検出されますが、アルゴリズムは両方のチャンネルで心拍数を識別することができます。図5に見られるように、ここでも赤外線信号が優勢です。

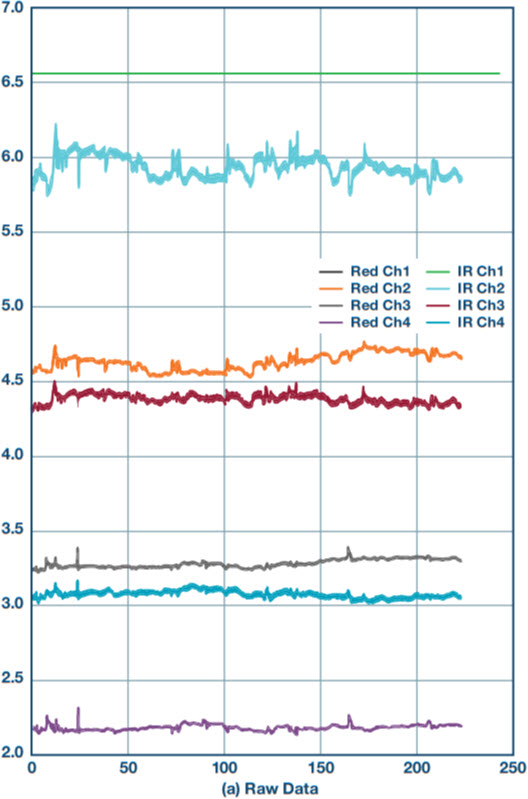

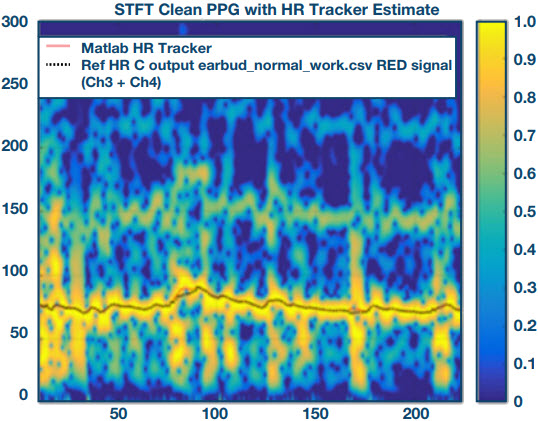

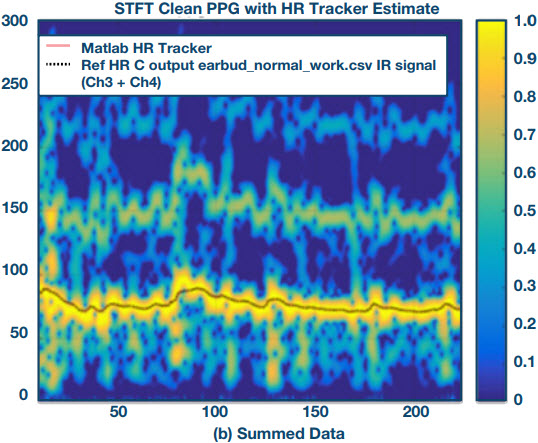
図5. 赤色光領域(上)はデスク作業時の4チャンネル測定を示し、赤外線領域(下)は未加工データと合計データを示します。心拍数(黒線)は、アルゴリズムにより合計データから決定できます。カラー・スケールは信頼度を示します。心拍数は加速度センサーなしで決定できます。
テスト・シナリオ4
歩行
以上のシナリオは静止測定条件を扱うものでしたが、この場合の被験者は1方向にゆっくりと移動します(1分間あたり約50歩)。図6のとおり、PPG信号では心拍と歩くペースが混じり合っており、様々なチャンネルの合計データは非常に不鮮明な信号を示しています。赤色光領域ではアルゴリズムにより心拍数を計算して決定することはできませんが、赤外線領域では可能です。しかし、変動が大きく信頼度も低いので、加速度センサーからの追加のモーション・データは非常に大きな助けとなります。これは特に、これまでの測定が、ゆっくりした歩行速度でのみ行われたためです。

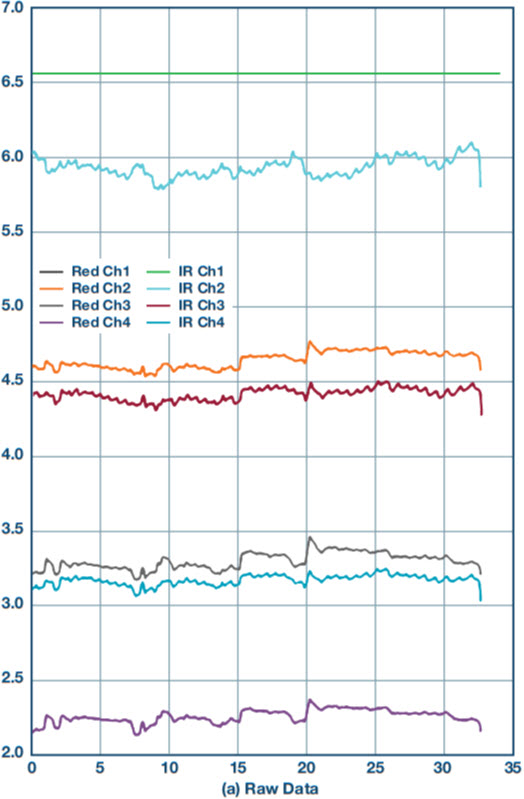

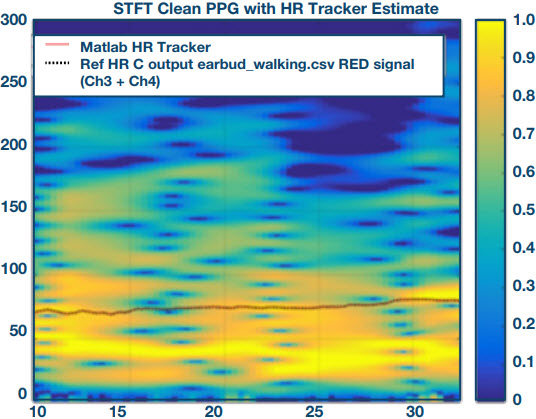

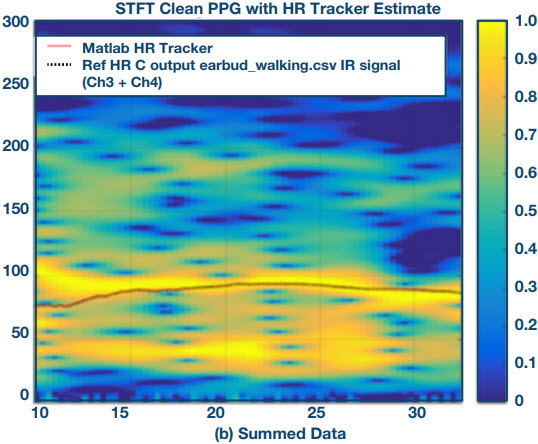
図6. 赤色光領域(上)は歩行時の4チャンネル測定を示し、赤外線領域(下)は未加工データと合計データを示します。心拍数(黒線)は、アルゴリズムにより合計データから決定できます。カラー・スケールは信頼度を示します。赤外線の場合は、加速度センサーを使うことなく心拍数を決定できます。
テスト・シナリオ5
ランニングとジャンプ
シナリオ5では一定動作での測定に代わり、ランニングとジャンプを交互に繰り返します。この場合は非常にはっきりとしたモーション・アーチファクトが認められ、図7に示すように、アルゴリズムにより正しい心拍数だけを取り出すのが非常に難しくなります。したがって、モーション・センサーによるサポートが不可欠であると考えられます。

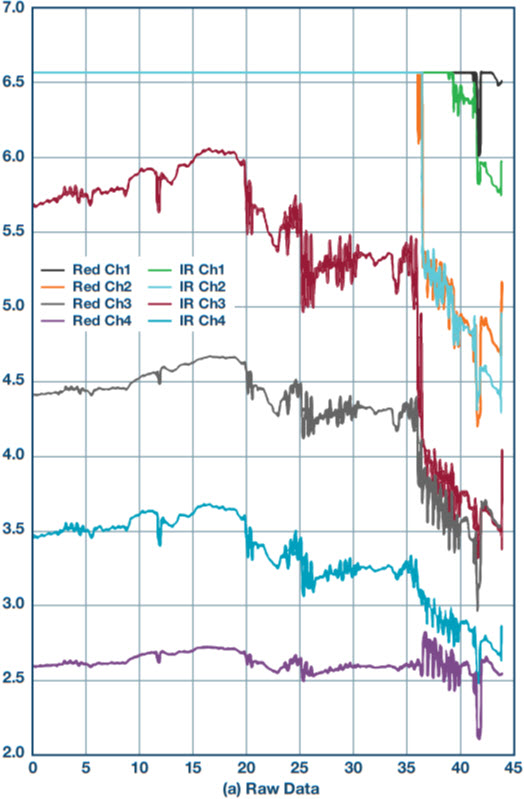

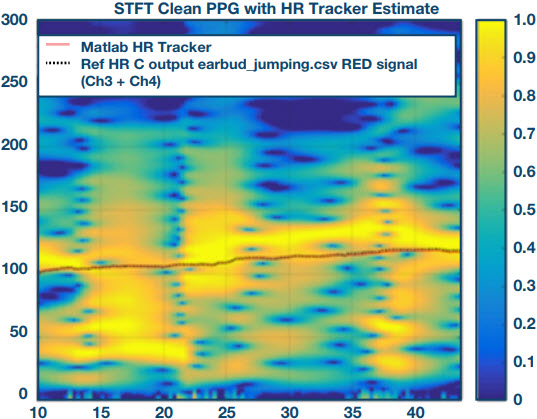

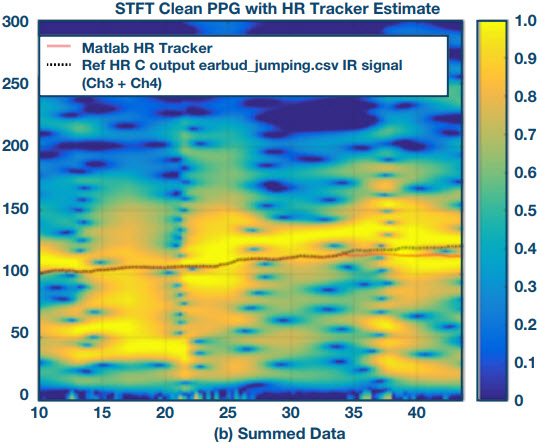
図7. 赤色光領域(上)はランニングとジャンプを行ったときの4チャンネル測定を示し、赤外線領域(下)は未加工データと合計データを示します。心拍数(黒線)は、アルゴリズムにより合計データから決定できます。カラー・スケールは信頼度を示します。心拍数を加速度センサーなしで決定するのは困難です。
モーション・センサーの必要性をより正しく判断するために、シナリオ5では、加速度センサーを使用する測定技術と使用しない測定技術の両方をテストしました。加速度センサーによるデータがなし(左)の場合とありの場合(右)の追加的スペクトラムの比較を、図8に示します。心拍数を識別する際に信号が改善されていることは明らかで、これには加速度センサーの助けが不可欠でした。

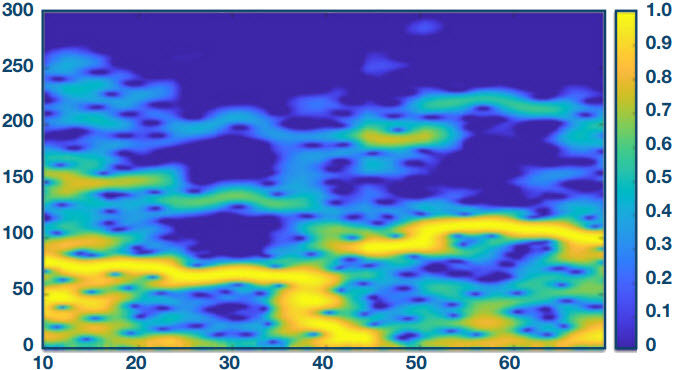

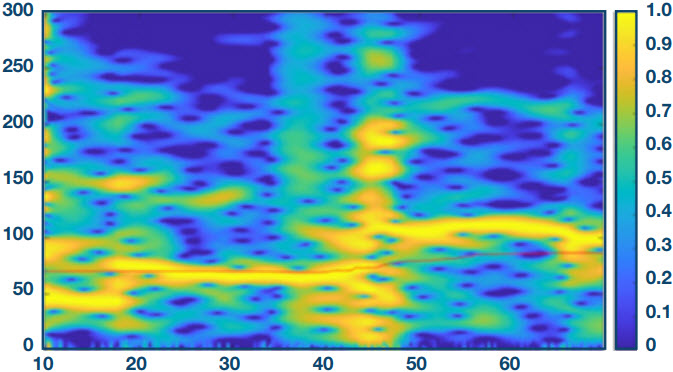
図8. 加速度センサー・データなし(左)の場合と、ありの場合(右)の追加的スペクトラム比較。加速度センサーを使うことで被験者の心拍数を再現することができます。
このテスト・ケースから、ほとんどの場合は、イヤフォンに組み込んだセンサーを使用することで、心拍数を非常に正確に決定できると結論付けられます。局部的な直線動作やゆっくりした直線動作の場合は、加速度データを使わなくても心拍数を決定できます。しかし、突発的な動作や素早い動作が含まれるような限られたケースでは、モーション補正データとの比較を行うことで、データの解析も可能になります。また、どのケースでも、信号強度は赤外線信号のほうが赤色光信号より高い値を示しています。
手首での測定と比較して、耳で測定した信号のほうが強度が高いので、より正確な測定を行うことが可能です。更に、赤色光または赤外線を使用すれば、血中酸素濃度を測定することができます。
まとめ
結論として、機能テスト・システムが示すように、耳を利用した測定は極めて有望な方法です。測定デバイスを機械的に統合することで改良したり、他の測定方法を加えるために拡張したりすることも可能です。このように、加速度センサーは転倒検知や歩行認識にも使用できることから、顧客にとって更なる価値を生み出すことができます。
著者について




















