統合ホーム・ヘルス・モニタリング
ヘルスケア分野は、人口の高齢化がますます進行し、慢性疾患が急増を続け、医療費が爆発的に膨れ上がっているという、3 つの大きな課題に直面しています。高齢者人口は今後 20 年間で指数的に増加すると予想されています。2030 年までにヨーロッパの人口の 1/3 が 65 歳以上となり、その 40 % に何らかの支援が必要になる見込みです。これらの人々は、十分な支援を受けずには自立した生活を送ることができないおそれがあります。高齢者が自立した生活を強く望んでも、自立した生活には往々にしてリスクが伴います。自宅における高齢者の行動を追跡してモニタし、その自立した生活を支援するために、さまざまなセンサーを実装した多くのスマートホーム技術が開発されてきました。センサー・ネットワークを備えたビルや都市環境は、高齢者や病人に、自立した生活をより長く続けるチャンスを提供します。
自立生活支援(Ambient assisted living: AAL)の考え方は、こうした背景の下にさまざまな利点をもたらすものです。その利点の 1 つに、患者、医師、医療機器を連携させることがあり、これによって医療と介護の効率が大きく向上します。この連携から、患者がどこにいても、その行動や健康に関するデータの記録と評価を自動化することができるようになります。その結果、医療関係者への連絡を、実際に患者の健康が悪化した場合だけに限ることができます。ここでの目標は、ヘルスケア分野にかかるコストを削減して、患者への支援を向上させることです。患者は、病院で継続的なモニタリングを受けないことになっても、自宅での毎日の生活の中で同じモニタリングが受けられます。
人の行動を分析し認識することは、今日の AAL システムの不可欠な要素です。これらのシステムでは、信頼性の高い正確なモニタリングを、必要に応じてリアルタイムに実行できることが欠かせない条件です。料理や睡眠、掃除といった日常的な活動は、高齢者や患者の身体能力を示す良い指標となります。したがって、これらの活動を自動的に認識するシステムがあれば、自動的なヘルス・モニタリングを行って、医療関係者に客観的な判断基準を提供することができます。このようなシステムは、突然の昏倒など、あらゆる異常を検出して、直ちにこれに対応できるものでなければなりません。このため、行動モニタリング・システムは、将来のヘルス・アプリケーションにおける非常に重要なステップとなります。
この記事では、ビジョンベースの行動モニタリング・システムとバイタル・サイン・モニタリング・システムを含む統合ホーム・ヘルス・モニタリング・システムを紹介します。このシステムの目的は、対象者の行動をモニタすると同時に、その人物の行動中のバイタル・サインをモニタできるようにすることです。ウェアラブル・ヘルスケア技術と組み込みビジョン技術の統合(結合)が、真のホーム・ヘルス・モニタリング・システムを実現する鍵です。
ビジョンベース・センシング
従来、行動モニタリング市場の大部分はビデオ監視技術が主流でした。しかし、家庭環境で起こっているこの行動モニタリングの変化に伴い、ビデオ分析は適切なソリューションとは言えなくなっています。これは、モニタ対象となる人物のプライバシー侵害や、送信する必要のあるデータ負荷量が大きいことなど、ビデオであるがゆえの基本的な欠点によります。組み込みビジョン・センシング技術の出現は、これら 2 つの問題を解決する糸口となります。組み込みビジョン・センシング・プラットフォームはエッジ・ノードでリアルタイム処理を行い、システムの出力はテレメトリ・データや処理済みのデータにしか使われません。したがって、プライバシーの問題は解決されます。送信されるデータは(プライバシーを侵害するような)ビデオや画像ではなく、料理や掃除、あるいは睡眠といった行動データだからです。また、送信するのはテレメトリ・データだけなので、データ・レートが小さくなり、帯域幅要求の 90 % 以上を節約できることから、ビデオ画像を送信する場合よりもコストを削減できます。
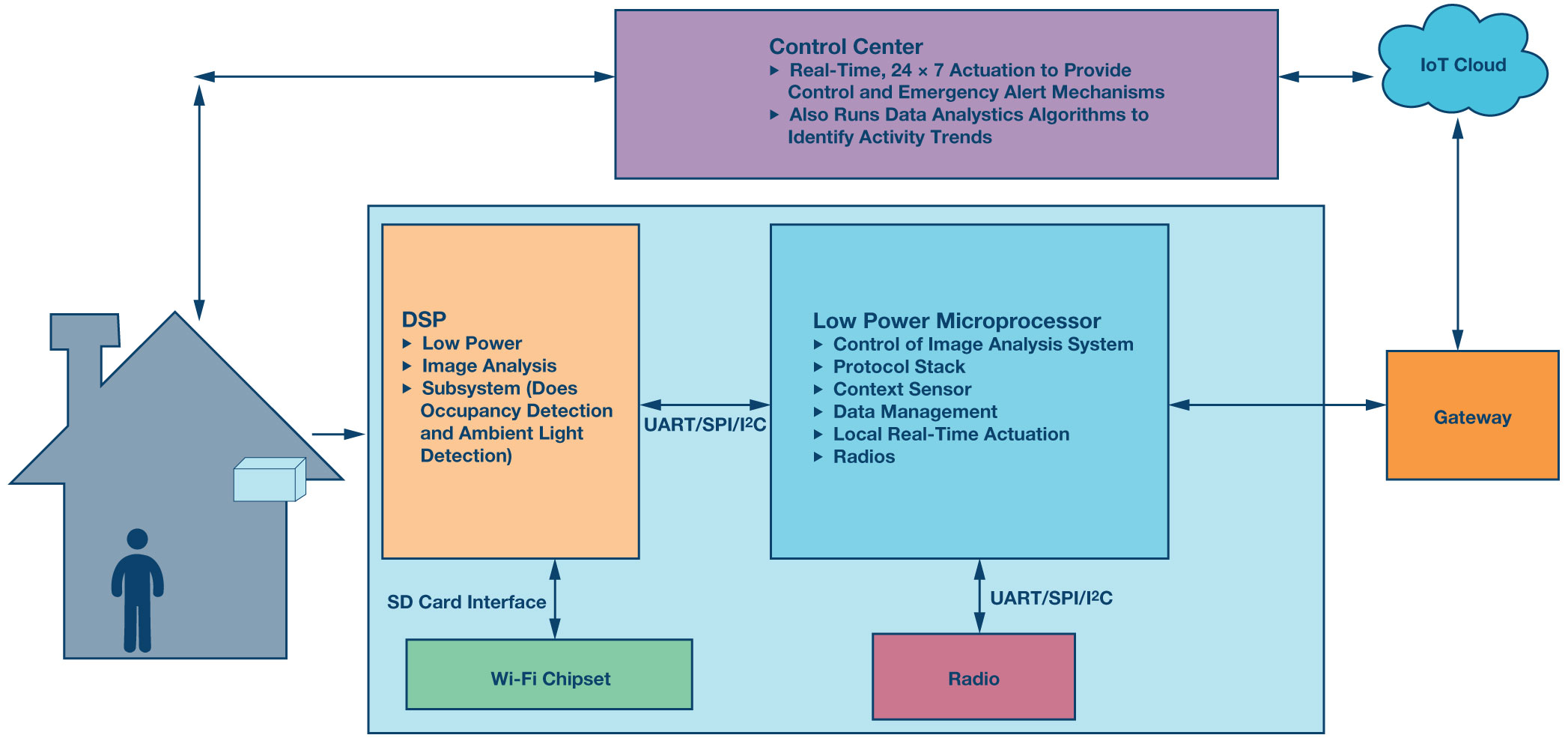
行動モニタリング用の組み込みビジョン・システムには、人物の検出、人物の移動の追跡、および特定の姿勢や行動の認識が含まれます。通常、代表的な組み込みセンシング・プラットフォームは、以下で構成されています。
- 光学システム(CMOS センサーとレンズ):これによって画像が取り込まれます。検出視野角、システムの構成、部屋の幾何学的形状に基づいて、適切な光学システム構成を決定する必要があります。場合によっては CMOS センサーで一部の画像処理ができることもあるので、その分だけ組み込みプロセッサの処理負荷が軽減されます。したがって、デューティ・サイクルを適切な値にすれば、最終的なシステムの消費電力を減らすことも可能です。
- 処理システム: プロセッサはこのシステムの心臓部であり、消費電力と使用面積を最小限に抑えながら、より多くの制御、センシング、およびインターフェース機能を実行することが期待されます。組み込みシステム・プラットフォームのプロセッサは、光学システムが取り込んだ画像に画像処理アルゴリズムを実行します。この処理が行われた後のシステムの出力は、単なるテレメトリ・データです。ホーム・ヘルスのシナリオでは、この出力は、就寝中、掃除中、あるいは転倒した、といった人物の行動に関するものになるでしょう。
- 接続機能: 組み込みビジョンベース・システム内の接続には有線または無線が考えられますが、家庭環境では無線が使われることになるでしょう。出力は単なるテレメトリ・データで、生のビデオ・データではないので、伝送ペイロードは大幅に少なくなります。このデータはクラウド・プラットフォームに送信され、看護師用または監視員用アプリの形で、その後もリアルタイムで使用できるように処理されます。
- クラウド/データ解析: これはシステムのバックエンドを構成するものです。クラウド・インフラストラクチャは、アプリの形でデータへのリアルタイム・アクセスを実現するだけでなく、バックグラウンドでデータ解析アルゴリズムを実行して、自宅にいる対象者の行動に関する傾向を把握することもできます。
{kind=link}
システム設計に関する検討事項と主な課題
- 信頼性: 行動モニタリング・システムによる行動情報の提供は、最も信頼性が高く、なおかつ安全で正確な形で行われることが絶対条件となります。また、緊急時にはその事態を正確に検出してアラームを発することができなければなりませんが、その際誤って関係者に連絡したり緊急出動が行われたりするのを防ぐために、誤認アラームが生成されないようにすることも重要です。
- 遅延: 行動モニタリング・システムがもたらす反応/アクチュエーション/アラーム発信の迅速性は、そのセキュリティ・システムの能力をまさに決定づける特長の 1 つです。行動モニタリングの基本的な機能は、睡眠、歩行、掃除、あるいは緊急事態などの別を問わず、その事象の発生からレポートまでの時間的遅延を最小限に抑えた形で、内容を直ちにレポートすることです。
- タンパー・プルーフ: 最後に、行動モニタリング・システムは、できる限りタンパー・プルーフにする必要があります。タンパーは、エンド・ノード、無線/有線接続、サイクルのデータ制御および解析エンドなど、システムのあらゆる段階で発生する可能性があります。自動化システム/ネットワークの構築に対する侵害行為は、セキュリティ・システムやホーム・モニタリング・システムにおける重要な問題です。
アナログ・デバイセズの組み込みビジョン・センシング・プラットフォーム
アナログ・デバイセズの BLIP(Blackfin® 低消費電力イメージング・プラットフォーム)は、低コスト、低消費電力の高性能組み込みビジョン・センシング・プラットフォームで、広範なリアルタイムのセンシング・アルゴリズムや画像処理アルゴリズムを実行することができます。BLIP はアナログ・デバイセズが提供する Blackfin シリーズのプロセッサ(ADSP-BFxxx)で構成されており、組み込みビジョン・センシング・アルゴリズムに最適です。BLIP およびアナログ・デバイセズの製品の詳細については、analog.com/jp/blip を参照してください。
正確、コンパクト、低消費電力のバイタル・サイン測定
アナログ・デバイセズは、2016 年 1 月にラスベガスで開催された CES 展示会に、このソリューションを初めて出展しました。出典したバイタル・サイン測定(VSM)の対象には心拍数と活動量が含まれており、これを手首に付けた時計に表示するものでした。
{kind=link}

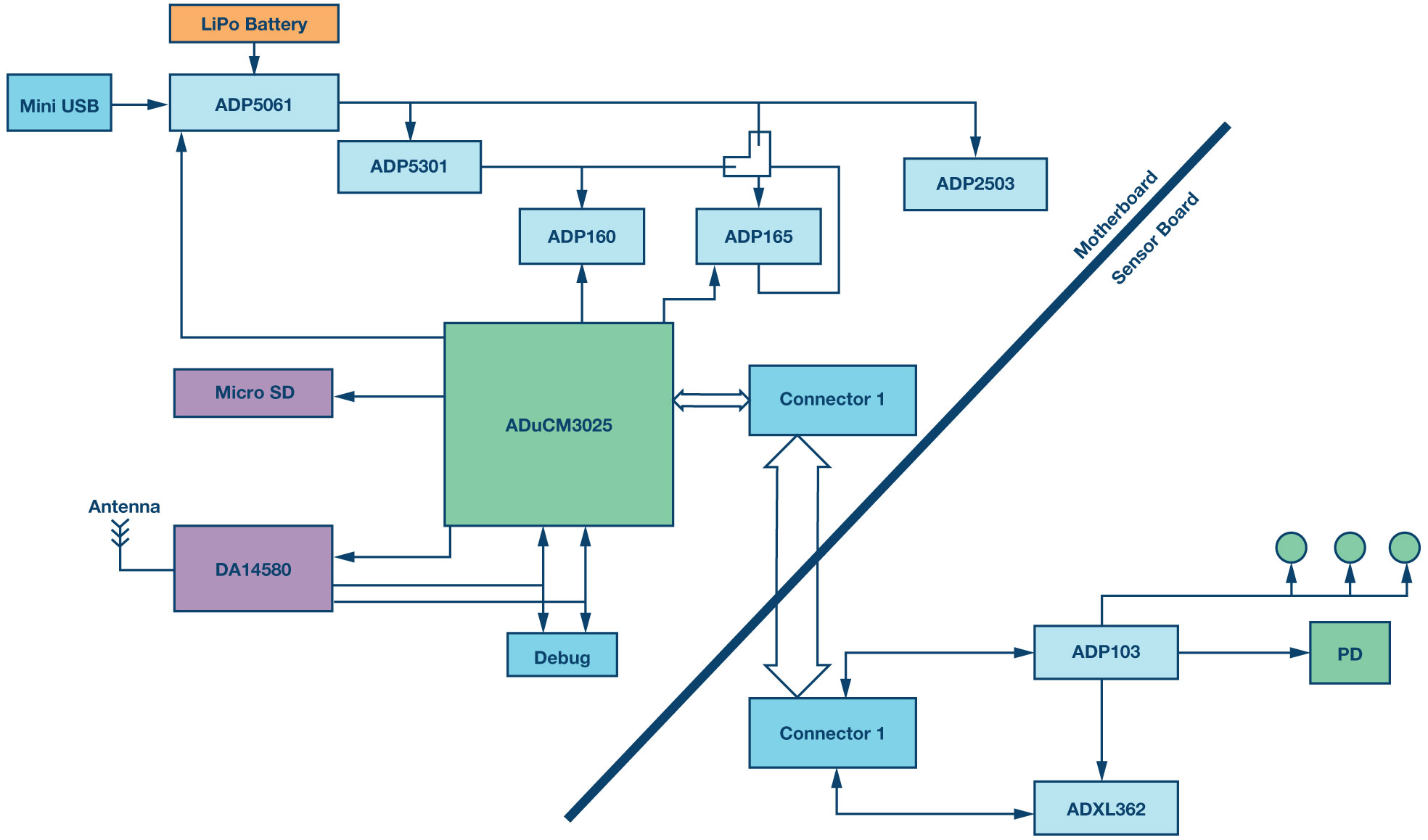
この腕時計は 1 枚のマザーボードで構成されるモジュラー・アーキテクチャを内蔵しており、このボードには、消費電力が市場で最小レベルの M3 コントローラである、アナログ・デバイセズの新しい Cortex®-M3 マイクロコントローラ ADuCM302x と、Google の Thread プロトコルを使って VSM データを送信可能な 2.4 GHz の無線トランシーバが組み込まれています。ドーター・ボードにはフォトメトリック・フロント・エンド ADPD103が使われ、その周囲には 3 個の緑色 LED と 1 個のフォトダイオード、および消費電力が市場で最小レベルの 3 軸加速度センサー ADXL362 が配置されています。これら 2 個のデバイスは互いに同期され、人物の動きをより効率的に補正しています。
ADPD103 はフォトメトリック・フロント・エンドで、反射光学測定によって動作し、その LED ドライバを通じて 8 mA ~ 250 mAの電流を送って、デバイス外部に取り付けられた LED を点灯させます。これらの LED の光が皮膚に当たり、フォトダイオードを通じて反射測定が行われます。信号はフロントエンドによって取り込まれ、さらに増幅とフィルタリングを行った後に積分されて 14 ビット ADC を介して変換された後、I²C インターフェースを介してホストに送信されます。
LED とフォトダイオードを外付けにする利点は複数あります。まず、LED の数、LED の色、その電流強度を選べることです。特に、LED とフォトダイオードの間隔を最適値にすることで、最大の変調指数を得ることができます(これにより AC/DC 比、つまり反射信号の品質が設定されます)。また、フォトダイオードのサイズを選んで(サイズを大きくすると変調指数がより大きくなります)、それに超低ノイズ、低消費電力の電流アンプを追加することもできます。
{kind=link}
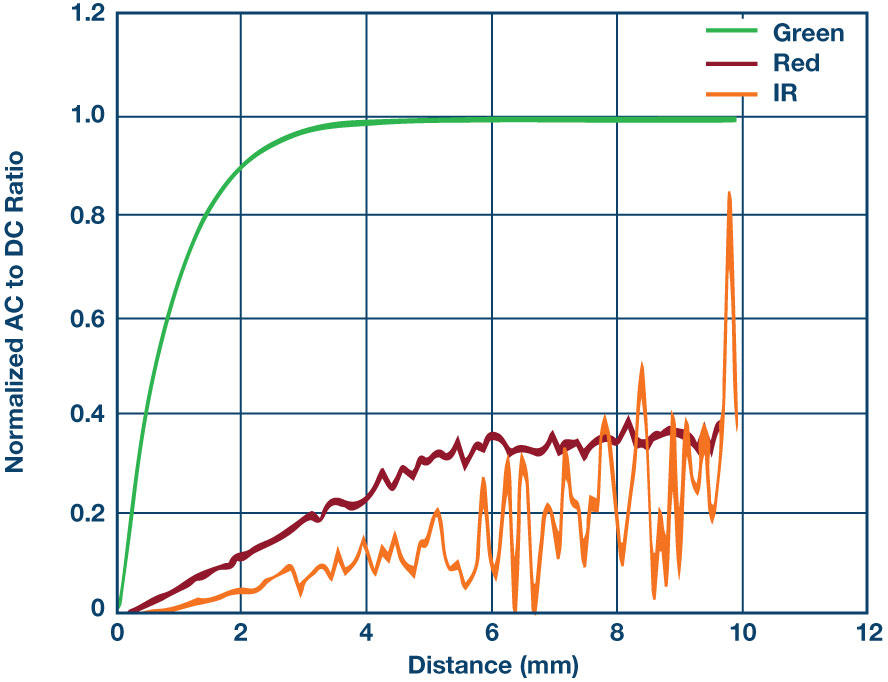
実行する測定のタイプ(HRM - 心拍数、パルス・オキシメトリ)および皮膚上の測定位置から、LED の色を選択します。手首での心拍数の測定用には緑色の LED を選択しましたが、これは、波長が 500 nm ~ 600 nm で、ヘモグロビン吸収が最も高いためです。心臓の鼓動によって手首に血液が流れ込むと、緑色の光の吸収量が多くなります。鼓動と鼓動の間では吸収量が少なくなります。緑色の LED を 1 秒あたり数百回点滅させることによって ADPD103 が 1 分間あたりの鼓動回数を計算し、それが心拍数として出力されます。図 4 に示すように、変調指数を大きくするには、緑色 LED とフォトダイオードの間隔を 3 mm またはそれ以上の都合の良い値にすることを推奨します。
{kind=link}
パルス・オキシメトリを測定する場合は、赤色 LED と赤外線 LEDを選んで、手首ではなく毛細血管が集中している指で測定を行います(この方法による HRM も利点をもたらします)。パルス・オキシメトリは 医師が患者の呼吸機能を評価して、これを迅速にコントロールするために使用する非侵襲的方法です。フォトダイオードを通過する赤色光線と赤外線の比率は、血液中の酸素化ヘモグロビンと脱酸素化ヘモグロビンのパーセンテージを示します。血液中の酸素飽和は SpO2 とも呼ばれます。
したがってオキシメトリは、毛細血管中のヘモグロビンの光吸収量の測定、具体的には各赤血球のオキシヘモグロビン(酸素化ヘモグロビン)とデオキシヘモグロビン(脱酸素化ヘモグロビン)の比率に基づくものです。
- 98 % SpO2 は、それぞれの赤血球が 98 % のオキシヘモグロビンと 2 % のデオキシヘモグロビンで構成されていることを意味します。
アナログ・デバイセズは、光学測定に関して多くの最適化を必要としない、表面積が制約されたアプリケーション用に、モジュール・ソリューション(アナログ・フロント・エンド、フォトダイオード、LED を同じパッケージにまとめたもの)も提供しています。このように、赤色 LED と赤外線 LED を含む ADPD142を使用すれば、指から SpO2 を測定することができます。その後継デバイスである ADPD144 は、機械的設計が向上しており、内部的な光害(LED からフォトダイオードへの直接光)が減少しています。このデバイスの測定誤差は 24,425 回のサンプル測定に対して 2.6 % で、FDA の基準を満たしています。ADPD144 のパッケージ寸法は 5 mm × 2.8 mm、高さは 1.35 mm です。
上述のとおり、変調指数を最大にするには、つまり測定信号の品質をできるだけ上げるには、LED とフォトダイオードの最小間隔を維持する必要がありますが、スペースに制約のあるモジュールでは最適値にできない場合も考えられます。したがって、動作、発汗、皮膚と時計の接触状態の変化などによる制約がさらに追加されるスポーツ・ウォッチなどのアプリケーションに推奨できるのは、フォトメトリック・フロント・エンドの外部に LED とフォトダイオードを使用したソリューションだけです。
ソフトウェアの提供に関しては、アナログ・デバイセズはフォトメトリック・センサーと加速度センサー用のドライバを提供している他、CES では独自のモーション補正アルゴリズムを紹介しました。このアルゴリズムは Cortex-M3 コア(ADuCM3027)上で実行され、13 kB の ROM と 7.8 kB の RAM で 1.5 MIPS しか必要としません。これまで、このタイプのアルゴリズムには浮動小数計算が必要で、そのためには消費電力が大きく価格も高い Cortex-M4 プロセッサを使用しなければならなかったので、これは大きなブレークスルーと言えます。
皮膚の色やタトゥーも測定反射信号の品質に影響します。このソリューションでは、タトゥーを避けて使用することを推奨します。また、皮膚の色が濃い場合は変調指数がわずかに下がるので、ソリューションの光学設計を最適化する必要があります。
超低消費電力プラットフォーム
それでは、上述の時計の消費電力を計算してみましょう。ここでは、Cortex-M3 使用の ADuCM3027 上でモーション補正アルゴリズムを実行するものとし、LED の消費電力を確定するためにいくつかの特性を仮定します。
ADPD103 は、1 つまたは 2 つのタイムスロットで 1 つの LED パルス・トレインを送信します。これにより、例えば LED ごとに異なる数のパルスを送ることが可能になります。ADPD103 の消費電力は、AFE と LED の消費電力の合計です。
例えば以下のような条件を設定します。
- FS = 100 Hz、2 スロット、パルス周期 A = 20 µs、パルス周期 B = 40 µs
- パルス数 A = 4、パルス数 B = 8
- LED A の最大電流 = 25 mA、
LED B の最大電流 = 100 mA - パルス幅 A = 3 µs、パルス幅 B = 3 µs
- したがって、LED_A の有効電流 =
(3 × 4/10000) × 25 mA =30 µA - したがって、LED_B の有効電流 =
(3 × 8/10000) × 100 mA =240 µA - AFE の A チャンネルの電流 =
Fs((20 + パルス数 × パルス周期)× Vddpeak + 0.13) =
100((20 + 4 × 20) × 0.0093 + 0.13) =106 µA - AFE の B チャンネルの電流 =
Fs((20 + パルス数 × パルス周期)× Vddpeak + 0.20) =
100((20 + 8 × 20) × 0.0093 + 0.20) =187 µA - ADPD103 の合計電流(両方の LED の消費電流を含む)は 563 µA
上述のように、アナログ・デバイセズが開発したモーション補正アルゴリズムは動作に 1.5 MIPS しか必要としません。つまり、動作周波数 は概算で 1.5 MHz です。ADuCM3027 の消費電力は38 μA/MHz で、これはマイクロコントローラの消費電流が 57 μAであることを意味します。ADXL362 は 100 Hz のサンプリング周波数で 2 µA を使用するので、この例の AFE と LED、Cortex-M3、および加速度センサー・システムは 622 µA を消費します。この低消費電力によって、この時計に組み込まれている LiPo バッテリを再充電せずに使用できる時間を最大限に延ばすことができます。スタンバイ・モードにおける ADPD103 の消費電流は 3.5 µAです。後継デバイスでは、この値が 1 µA まで減少しています。
なお、この例で示した電力計算は、高精度アプリケーションにはあてはまりません。実際の結果は、対象となるアプリケーション、LED に流れる電流、およびサンプリング周波数に応じて、これより良くなる場合もあれば悪くなる場合もあります。これらの要素は、システムの消費電力に直接関係しています。
以上のように、アナログ・デバイセズの低消費電力ソリューションは、ヘルスケア・デバイスの再充電時間を短縮して消費電力を削減することに寄与し、それによって高齢者のより自立したライフスタイルを実現します。
著者について
























