HART との互換性を容易にするフレキシブルな帯域幅の 4 MA ~ 20 MA 電流入力
4 mA ~ 20 mA アナログ電流ループは、プロセス・プラント環境と工場環境の両方で一般的に使用されています。どちらの環境でも基本的な信号は同じですが、帯域幅の要件は大幅に異なります。工場の制御システムは、位置/変位センサーからの信号収集に 100 Hz のループ帯域幅を必要とすることがあります。それに対して、通常のプロセス制御システムは数ヘルツの更新レートがあれば十分で、多くの場合は HART が有効です。HART(HighwayAddressable Remote Transducer)プロトコルでは、従来の 4 mA ~20 mA アナログ電流ループを介して双方向の 1.2 kHz/2.2 kHz FSK(Frequency Shift Keying)変調デジタル通信を行えます。両方の環境に対応する 4 mA ~ 20 mA 入力を設計することは簡単ではありません。この資料では、そのような設計を大幅に単純化する方法について説明します。
図 1 の回路図は、HART 対応アナログ入力を実装するための従来の手法を示しています。
{kind=link}
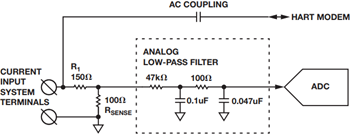
図 1. パッシブ・フィルタを使用した HART 対応入力。
R1 と RSENSE は 250 Ω のシステム端子インピーダンスを実現します。HART FSK 信号は、そこから HART モデムに AC 結合されています。4 mA ~ 20 mA のアナログ信号は、高精度の 100 Ω RSENSE 抵抗によって 0.4 V ~ 2 V の電圧信号に変換されます。その後、アナログ・ローパス・フィルタが HART FSK 成分を減衰させたうえで、アナログ信号が ADC に送られます。2 次ローパス・アナログ・フィルタの帯域幅は 25 Hz で、ロールオフは –40 dB/decade(周波数 10倍ごと)です。
この回路は、HART 仕様に準拠していて、4 mA ~ 20 mA のフルスケールから –60 dB 以上のレベルまで HART FSK 信号を減衰し、HART FSK 通信による 4 mA ~ 20 mA アナログ入力の外乱を 0.1 %未満に抑制します。
一方、このアナログ・ローパス・フィルタは、システム入力でフルスケール・ステップが発生した後に 0.1 % 以内へのセトリングを実現するためにほぼ 70 ms を要します。高速動作が必要で、HART 通信が不要なシステムの場合、長いセトリング・タイムと低帯域幅は不適切です。アナログ・フィルタをバイパスすることもできますが、その場合はスイッチやマルチプレクサなど追加のアナログ回路が必要です。
図 2 に HART が有効なアナログ入力の代替手法を示します。{kind=link}
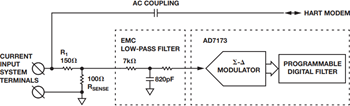
Figure 2. HART enabled, flexible bandwidth input.
前述の回路と同様、HART FSK 信号は 250 Ω の入力インピーダンスから AC 結合されていて、4 mA ~ 20 mA のアナログ信号は高精度の 100 Ω RSENSE 抵抗によって 0.4 V ~ 2 V の電圧信号に変換されています。ただし、この回路では、システム耐性と電磁両立性(EMC)を実現するため、大幅に簡素化されたローパス・フィルタが信号の帯域幅を約 27 kHz に制限します。このフィルタは、システム入力でのフルスケール・ステップが発生した後に 40 μ s で0.1% へのセトリングを実現します。
この信号は、デジタル・フィルタを内蔵した ΣΔADC(AD7173 など)に渡されます。デジタル・フィルタは、低速動作と最適な HART FSK 信号の除去に合わせて設定することも、高速アナログ入力機能が必須の高速動作に合わせて設定することもできます。
AD7173 デジタル・フィルタには、数多くの動作モードがあります。HART FSK 信号除去に適したモードの 1 つは、ノッチが 400 Hz(またはその約数)に設定された sinc3 フィルタで、1.2 kHz の低いHART FSK 周波数で深いフィルタ・ノッチを実現し、2.2 kHz の高い周波数で大幅な減衰を実現します。図 3 のグラフでは、このデジタル・フィルタの周波数応答と図 1 のアナログ・フィルタを比較しています。
{kind=link}
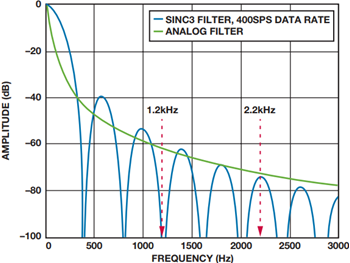
図 3. パッシブ・フィルタを使用した HART 対応入力。
実際はこれほど単純ではありません。HART を介してメッセージ全体を送信する場合、HART FSK 変調信号スペクトルは基本変調周波数にエネルギーを含める以外に、1.2 kHz と 2.2kHz の各搬送波の間、およびそれらの上下の周波数帯にも成分を含めます。
図 4 に、ADC 入力に対する HART FSK メッセージの代表的なスペクトルと、400 Hz ノッチの sinc3 フィルタで減衰したときのスペクトルを示します。この場合、マスターは HART コマンド 3 を送信し、スレーブがそのコマンドに応答しています。
{kind=link}
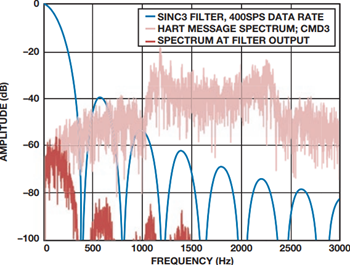
図 4. HART メッセージ・スペクトル。
この図から、特に低い周波数で、HART メッセージの一部が A/D出力データの一部として引き続き存在してしまうことは明らかです。つまり、デジタル・フィルタ設定を簡単に変更して、4 mA ~20 mA の入力速度と、HART FSK 信号の除去の間で適切なバランスを維持することができます。
図 5 に、4 mA ~ 20 mA のフル・スケールに対するパーセント誤差として測定したシステムの性能と、アナログ・フィルタ(図 1)および sinc3 デジタル・フィルタ(図 2)のシステム速度の関係を示します。
{kind=link}
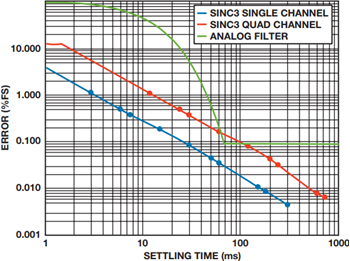
図 5. Sinc3 フィルタとアナログ・フィルタの関係。
アナログ・フィルタはハードウェアに取り付けられ、セトリング・タイムは固定されています。システム入力側で高速変化するアナログ信号の場合、アナログ・フィルタ出力の誤差は、このようなフィルタ固有のセトリングの低速度によって決まります。例えば、システム入力が 40 ms ごとにフル・スケールに達するように変化する場合、フィルタ出力が適正値の 1 % 以内にセトリングされることは期待できません。入力信号が低速の場合、アナログ・フィルタの出力誤差は、HART FSK 信号の低周波数成分を除去する能力によって決まります。代表的な HART コマンド 3 メッセージに対してこの誤差を測定したところ、4 mA ~ 20 mA フル・スケールの約 0.09 % でした。
それに対して、デジタル sinc3 フィルタのセトリング・タイムはユーザーが設定するパラメータであり、HART FSK 信号に起因するフィルタ出力の誤差はフィルタのセットアップに対応します。例えば、前述した 400 Hz ノッチの sinc3 フィルタは 7.5 ms のセトリング・タイムに対応します。HART コマンド 3 で通信している場合、A/D の結果で測定された外乱は 4 mA ~ 20 mA のフル・スケールの 0.4% 未満でした。4 つのアナログ入力のあるシステムでは、sinc3 フィルタはチャンネル間で順番に切り替えられます。ノッチが 400 Hz である同じ sinc3 フィルタは、4 つのチャンネルすべてをスキャンするのに 4 × 7.5 = 30 ms を要します。プロット内で4 チャンネル・システムの 30 ms の位置に約 0.4 % の同じ誤差が示されているのはこのためです。
より高精度の 4 mA ~ 20 mA 入力の場合、sinc3 フィルタのセトリング・タイムを 30 ms に設定できます。これは、100 Hz ノッチに対応し、フル・スケールの 0.1 % 未満になるように HART 信号を除去します。システムで速度が重要な場合は、セトリングが 6ms(約 500 Hz ノッチ) の sinc3 フィルタは 4 mA ~ 20 mA のフル・スケールの 0.5 % 以下になるように HART 通信信号を除去します。速度が唯一の要件で HART 通信が必要ではない場合、この例で使用した AD7173 はチャンネルあたり 161 μ s のセトリング・タイムを設定して 31 kSPS でサンプリングを実施できます。
結論として、従来のアナログ・ローパス・フィルタは理解しやすく、基板上にあるチャンネルあたりの部品数は増えますが、マルチチャンネル・システムに実装した場合に優れたアナログ入力性能を得られることがあります。それに対して、 ΣΔ ADC に内蔵されたデジタル sinc3 フィルタでは優れた柔軟性を実現でき、システムのエンド・ユーザーを含めすべてのユーザーがこのメリットを得られます。デジタル・ソリューションではハードウェアが少なくて済みます。適切にセットアップした場合、HART FSK 信号のフィルタリング性能はシングル・チャンネル・システムでのアナログ・ソリューションよりも大幅に優れていて、4 チャンネル・システムでのアナログ・ソリューションに匹敵するか、それを上回ります。
著者について
この記事に関して
製品
























