

概要
設計リソース
設計/統合ファイル
• Schematic• Bill of Materials
• Gerber Files
• PADS Files
• Assembly Drawing 設計ファイルのダウンロード 633.57 K
評価用ボード
型番に"Z"が付いているものは、RoHS対応製品です。 本回路の評価には以下の評価用ボードが必要です。
- EVAL-CFTL-6V-PWRZ ($23.01) Universal Power Supply
- EVAL-CN0368-SDPZ ($87.99) Magnetoresistive Angle and Linear Position Measurements Board
- EVAL-SDP-CB1Z ($134.00) Eval Control Board
機能と利点
- 磁気抵抗による角度および直線位置の測定
- 単電源
- 小さなフットプリント
参考資料
-
AN-688: Phase and Frequency Response of iMEMS® Accelerometers and Gyros (Rev. 0)2015/02/14PDF135 kB
-
MT-101: Decoupling Techniques2015/02/14PDF954 kB
-
MT-031: データ・コンバータのグラウンディングと、「AGND」および「DGND」に関する疑問の解消2009/03/20PDF144 kB
-
CN-0368: 磁気抵抗による角度および直線位置の測定2016/06/23PDF660 K
回路機能とその特長
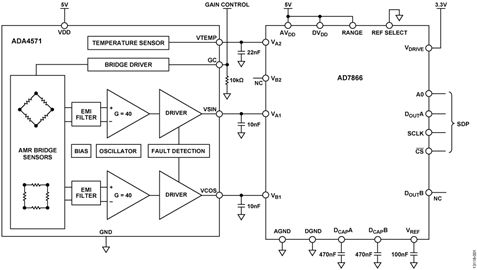
図1に示すコンパクトな2チップ回路は、角度位置と直線位置の両方の測定に最適な異方性磁気抵抗(AMR)による非接触測定のソリューションを提供します。この2チップ・システムは、使用する磁石のサイズに応じて、180°で0.2°以下の角度精度を、0.5インチの範囲で2ミル(0.002インチ)の直線精度を実現できます。
この回路は、工作機械の速度制御、クレーンの角度制御、ブラシレスDCモーターおよびその他の工業用アプリケーションや車載アプリケーションなど、角度と長さを高速、高精度で非接触測定することが重要なアプリケーションに最適です。


回路説明
ADA4571は、シグナル・コンディショニング・アンプ、ADCドライバ、および温度補償用の温度センサーを内蔵した磁気センサー(AMR)です。ADA4571は周囲の磁界の角度位置を示す2つのアナログ出力を生成します。
ADA4571にはAMRセンサーと固定ゲイン(G = 公称40)の計装アンプが含まれています。ADA4571は、回転磁界の角度に関係するクリーンで増幅したコサインとサインの出力信号を供給します。出力電圧範囲は電源電圧に比例します。
センサーは、相対角度が45°の2個のパーマロイ・ホイートストン・ブリッジを内蔵しています。x-yセンサー平面内の回転磁界により、センサーと磁界方向間の角度(α)の2倍の角周波数の2つのサイン波出力信号が生じます。x-y平面の均一磁界内では、出力信号はz方向(エア・ギャップ)の物理的な位置の影響を受けません。
サイン出力とコサイン出力の出力電圧振幅はVDDの7%~93%です。2つの診断域(VDDの0%~7%とVDDの93%~100%)があることにより、全ての内部接続ボンディング・ワイヤの断線を検出できます。
ADA4571は8ピンSOICパッケージを採用しています。
VSIN出力とVCOS出力の出力インピーダンスは50Ωで、外付けの10nFコンデンサとともに318kHzのノイズ・フィルタを形成します。
AD7866はデュアル・チャンネルの同時サンプリング、12ビット、1MSPS SAR ADCです。RANGEピンの極性により、アナログ入力範囲と出力コーディングが決まります。チップ・セレクトがローになるときにこのピンをロジック・ハイに接続すると、次に変換されるアナログ入力範囲は0V~2 × VREF(0V~5V)になり、AMRセンサーADA4571からの0.35V~4.65Vの信号に対して、ヘッドルームは約350mVのままとなります。
また、REFSELピンをローに接続すると、ADCは2.5Vの内部リファレンス電圧を使用するように設定されます。この電圧はVREFピンから供給できますが、システムの他の場所で使うにはバッファが必要です。ADCの適切な動作を保証するために、DCAPAピンとDCAPBピンは470nFのコンデンサでデカップリングしています。
AD7866はセンサーの両方のチャンネルを同時にサンプリングします。デジタル・ワードは通常DOUTAおよびDOUTBで得られ、各データ・ストリームは先頭の1ビットの0、それに続く3ビットのステータス・ビット、次いで12ビットの変換データで構成されます。ただし、さらに16クロック・サイクルの間ピンをローに保持することで、両方のデジタル・ワードを1つのチャンネルDOUTAから得ることができます。したがって、SPIインターフェースにより、1本のデータ・ラインで両方のチャンネルにアクセスすることができます。
AD7866の2個のADCのそれぞれへの入力に2チャンネル・マルチプレクサが備えられています。A0入力ピンをロジック0にするとA1入力とB1入力が変換可能になり、A0入力ピンをロジック1にするとA2入力とB2入力が変換可能になります。ADA4571からの温度センサーの出力をAD7866のA2入力に接続することで、システムのソフトウェアによる温度キャリブレーションを行うことができます。
磁気抵抗(MR)の理論
磁気抵抗は、外部磁界の影響を受けると物質の抵抗値が変化する性質です。最も普及しているMRセンサーはAMR技術をベースにしています。


AMR効果の例を図2に示します。導体を流れる電流(I)は外部磁界(HY)の影響を受けます。導体の抵抗値は磁化ベクトル(M)と電流ベクトル(I)の角度(Ø)の関数として変化します。磁化ベクトルは内部磁界(HX)と加えられた外部磁界(HY)を合計したものです。
抵抗値が最大になるのは磁化ベクトル(M)が電流ベクトル(I)と平行になったときです。抵抗値が最小になるのは磁化ベクトル(M)が電流ベクトル(I)と垂直になったときです。
AMR効果を有効に利用するには、導体自体が機械的応力の影響を受けにくく、磁気拘束力の影響を受けやすい素材でなければなりません。これらの理由で、パーマロイ(ニッケル80%、鉄20%)合金がAMRセンサーの製造に最も多く使われています。
パーマロイの特性
パーマロイ・ストリップには、角度測定システムの開発時に設計上の課題となる特性が2つあります。
1つ目は、パーマロイの直線動作領域が狭いことです(図3参照)。磁化ベクトル(M)と電流ベクトル(I)の角度(Ø)が大きいときだけ、応答が直線になります。残念ながら、パーマロイは応答が直線になるとすぐに飽和してしまいます。


2つ目は、パーマロイは極性に対する感度がないことです。磁化ベクトル(M)と電流ベクトル(I)の角度(Ø)の正負に関係なく、パーマロイ・ストリップの抵抗値は減少します。
バーバーポール
パーマロイ・ストリップの直線性および極性に対し感度がない点を改善するのに使われる一般的な方法は、図4に示すように、ストリップの軸に対して45°の角度でアルミのストライプ(縞模様)を追加することです。これはバーバーポール(理髪店の赤青白が巻かれた棒状の看板)と呼ばれます。バーバーポールの間を流れる全ての電流は最短経路(垂直経路)をとるので、電流ベクトル(I)と磁化ベクトル(M)の角度が45°シフトします。


バーバーポールをパーマロイ・ストリップに追加した結果を図5に示します。電流ベクトルは45°シフトしますが、磁化ベクトルは変化せず元のままです。グラフの中央で直線的な挙動が見られることに注意してください。


磁界強度
ADA4571のデータシートの仕様を確実に満たすためには25kA/mの最小電磁界強度が必要です。この励起磁界はADA4571パッケージ内の検出素子の中心と交差する必要があります。
磁石を選択する際は、図6に示すように、センサーと磁石間のエア・ギャップを考慮します。磁石がセンサーに近接していない(距離dが非常に大きい)場合、最小電磁界強度の条件を確実に満たすため、より強力またはより大きな磁石が必要になる可能性があります。


センサーの基礎
標準的なAMRセンサーは2個のホイートストン・ブリッジで構成されており、図7に示すように、一方のブリッジは他方のブリッジに対して45°の相対角度を持っています。


回転磁界は、図8に見られるsin (2ø) とcos (2ø) の出力を生じます。両方の信号とも180°の範囲を周期とするので、追加部品や基準点なしでは360°全体の測定は不可能です。


チャンネル感度
ADA4571センサーの各チャンネルの公称感度は52mV/°です。つまり、磁化ベクトルとセンサーの方向が1°変化すると出力電圧が52mV変化します。感度は角度に対して一定ではありません。感度が低下する領域は、各出力電圧の波形の傾きがゼロに近づく部分です。
図8を見ると、コサイン出力(緑線)は磁化ベクトルの角度が0°、90°、180°、270°の近くで感度が低下しています。同様に、サイン出力(赤線)は45°、135°、225°、315°付近で感度が低下しています。幸いなことに、片方のチャンネルの感度が低いとき、他方のチャンネルは感度が高い領域にあります。
システム帯域幅、磁界の回転
磁界の角速度は、回路の帯域幅を理解する上で1つの重要な要素です。ADCは1μsごとに1サンプルを変換します。1°の分解能を実現するために、磁界が変化できるのは1msに1°(2.778kHz)だけです。そうでないと、ADCは磁界の変化に対応するのに十分な速度でサンプリングすることができません。この制限により、1MSPSのADCに対する磁界の使用可能な最大角速度が2.778kHzに設定されます。
回転測定テストの結果
直径方向に磁化されたN42磁石(直径 = 0.5インチ、厚さ = 0.125インチ)を金属棒の端に取り付けます。高精度DCモーターにより、この棒の精密な角度制御を行うことができます。センサーを磁石の表面に対して正確に実装します。エア・ギャップを2mmに設定します。センサーが磁気で十分に飽和されている限り、測定結果はエア・ギャップの影響をほとんど受けません。
モーターの回転によってセンサーと交差する回転磁界が生じると、角度計算とデータ収集に適したサインとコサインの出力電圧を繰り返し生成します。
図9はセットアップの機能図です。図10は、シャフトの端に配置したデータ収集に使用するセットアップの写真です。このセットアップは、ブラシレスDCモーター、実装装置、磁石、対応するADA4571センサーを搭載したPCBで構成されています。




図11は、磁石を数回回転させたときのモーターの機械的角度とセンサーの計算した磁界角度を比較した結果です。この計算には2つの出力の比の逆正接関数を使用します。この誤差はキャリブレーションなしでは±1°に達します。


オフセット補正のみを行った誤差を図12に示します。サインとコサインの振幅ミスマッチ、非直線性、直交性などに対する補正のための調整を追加する必要はありません。オフセットは、各チャンネルが機械的に1回転するときのピークtoピーク値または平均値を使って求めます。各チャンネルからこのオフセットを差し引いて、センサーの直線応答を求めます。最大誤差は±0.2°に達しますが、大部分の範囲で誤差は±0.1°を下回ります。


直線位置のテスト結果
インクリメンタル型(相対位置測定)の直線位置測定システムを構成するために必要な変更はごくわずかです。図13に示すように、磁石をN極とS極が交互に配置された多磁極棒磁石に置き換えます。


センサーは、磁石と平行に移動すると、磁極の長さだけ進むごとに180°回転する磁界を検出します。磁石の磁極の長さ(P)とセンサーの角度精度(ΔØ = 0.05°)により理論上の精度(Δx)が決まります。
Δx = P × ΔØ/180°
この方法により、1つの磁極の長さだけのアブソリュート型(絶対位置)測定システムが得られます。磁石に複数の磁極があれば、通過した磁極の数を数えることで、さらに正確な測定値が得られます。センサーと磁石間の理想的な距離は磁石の磁極の長さの半分です。
EVAL-CN0368-SDPZ PCBは、磁石をデジタル・ノギスのアームに装着してテストします。EVAL-CN0368-SDPZ PCBは、ADA4571のAMRセンサー(U5)の面が磁石面に垂直になるように装着されています。磁石が動くと、ノギスが移動距離を0.0005インチの精度で表示します。同時に、磁力線がセンサーと交差し、使用可能な出力電圧を発生します。セットアップの図を図4に、写真を図15に示します。




セットアップに使用する磁石は長さが2インチで、センサーから1インチ離します。直線動作検出に推奨するセンサーと磁石間のエア・ギャップは、磁石の磁極の長さの半分に等しい値です。磁石をx軸に沿って動かしながらデータを集め、評価用ソフトウェアの測定値をノギスのデジタル・ディスプレイに表示される値と比較します。1.0インチの範囲で記録された出力位置の誤差を図16に示します。誤差は全範囲で±2ミルです。


測定範囲を0.4インチに制限すると、より良好な測定結果が得られます。0.4インチでは図8に示されている三角関数波の直線部分に一致しており、測定を30˚の範囲に制限していることに注意してください。この変更された範囲に新しいゲイン補正係数を適用すると、図17に示すように、誤差は±1ミルになります。


図18に示すように、センサーは磁石本体の中央に位置するように置かれています。一般的な誤差源である垂直方向の位置ずれは、センサーが磁石の位置に対して上下に動く際に生じます。


図19はセンサーと磁石の垂直方向の位置ずれによって生じる誤差を示しています。このテストは、データを収集する前に、PCBを0.25インチと0.5インチだけ上下に動かして行います。1.0インチの測定範囲では、ターゲットを上下に0.25インチ動かすと計算値に数ミルの誤差が加わります。センサーを上下に0.5インチ動かすと測定値はさらに悪化し、元の測定値に数十ミルの誤差が加わります。


このような大きな誤差は、ゲイン補正係数を変更すると小さくできますが、完全に除去することはできません。磁石からの距離を負方向に大きくすると磁界強度と磁力線の方向に影響を与え、データの一部が復元できなくなります。次に一般的な誤差源は、図20に示す回転方向の位置ずれです。センサーと磁石は垂直軸に対しては理想的な位置に置かれていますが、センサーが磁石面に平行ではありません。


回転方向の位置ずれに関する測定値を図21に示します。緑線は平行な状態で記録された誤差を示しており、赤線と青線はセンサーを磁石面に対して左右に回転させることによって追加される誤差を示しています。


最後の一般的な誤差源は、図22に示すセンサーと磁石の距離です。センサーと磁石間の理想的な距離は磁石の長さの半分です。この距離を増減すると、データ・セットに誤差が生じます。磁石とセンサーの距離が近すぎる状態のベンチテスト・セットアップを図22に示します。


磁石とセンサー間の距離を0.1インチ、0.5インチ、1インチに設定してから、データ・セットを収集します。設定を変えた誤差を図23に示します。


このような大きな誤差は、ゲイン補正係数を変更すると小さくできますが、完全に除去することはできません。磁石からの距離を負方向に増減すると磁界強度と磁力線の方向に影響を与え、データの一部が復元できなくなります。
角度位置のアプリケーションに関する測定と計算全てに使用されるLabVIEW®評価用ソフトウェアのスクリーンショットを図24に示します。Linear Measurement tabのスクリーンショットを図25に示します。




キャリブレーション時に、各ホイートストン・ブリッジの最大電圧VMAXと最小電圧VMINの出力を決定します。これらの値を知ることにより、電圧をデジタル・コードに対してより正確にマッピングすることができます。Select Calibration Methodドロップダウン・ボックスを使ったVMAXとVMINの値を決定する方法は2つあります。
1つ目は、磁気を360°回転させ、ソフトウェアでVMAXとVMINを特定する方法です。この場合、ソフトウェアでは各チャンネルのオフセット電圧を計算し、これらの値を使って磁界角度を決定します。
2つ目は、磁気を360°回転させ、ソフトウェアでVMAX、VMIN、およびVTEMPを特定する方法です。このプロセスはその後異なる温度で繰り返されます。ソフトウェアでは、これらの変数を使って各チャンネルのオフセット電圧と温度依存性を計算し、その後、磁界角度を計算します。
PCBレイアウト時の考慮事項
高精度を必要とする回路では、ボード上の電源とグラウンド・リターンのレイアウトを考慮することが重要です。PCBでは、デジタル部とアナログ部をできるだけ分離するようにします。CN-0368システムのPCBは、面積の大きいグラウンド・プレーン層と電源プレーン・ポリゴンを積み重ねた4層基板を使用しています。レイアウトとグラウンディングの詳細についてはMT-031チュートリアルを、デカップリング技術についてはMT-101チュートリアルを参照してください。
適切にノイズを抑え、リップルを下げるため、全てのICへの電源は1µFと0.1µFのコンデンサでデカップリングします。これらのコンデンサはできる限りデバイスの近くに配置します。全ての高周波デカップリングにはセラミック・コンデンサを推奨します。
電源ラインはトレース幅をできるだけ大きくして低インピーダンス経路を与え、電源ラインのグリッチ影響を減らします。クロックなどの高速スイッチング・デジタル信号は、デジタル・グラウンドを使ってボード上の他の部分からシールドします。このPCBの写真を図26に示します。
CN-0368の設計サポート・パッケージはwww.analog.com/CN0368-DesignSupportで入手できます。


回路の評価とテスト
この回路は、EVAL-SDP-CB1Zシステム・デモンストレ-ション・プラットフォーム(SDP)ボードとEVAL-CN0368-SDPZ回路ボードを使用します。これら2枚のボードは120ピン接続用コネクタを備えているので、手早くセットアップして回路の性能を評価することができます。
EVAL-CN0368-SDPZには、この回路ノートで説明したように評価用の回路が含まれています。EVAL-SDP-CB1Zボードは、CN0368評価用ソフトウェアとともに使用し、EVAL-CN0368-SDPZ回路ボードからデータを収集します。
必要な装置
以下の装置が必要です。
- USBポート付きWindows® XP(32ビット)、またはWindows 7(32ビット)搭載PC
- Windows Vista(32ビット)、または Windows 7 (32-bit)
- EVAL-CN0368-SDPZ回路ボード
- EVAL-SDP-CB1Z SDPボード
- 6V電源またはACアダプタ
- CN0368評価用ソフトウェア
- センサー・パッケージでの最小磁界強度が25kA/mのネオジム磁石
評価開始にあたって
CN0368評価用ソフトウェアCDをPCにセットして評価用ソフトウェアをロードします。マイコンピュータから評価用ソフトウェアCDのあるドライブを探し、Readmeファイルを開きます。Readmeファイルの指示に従って評価用ソフトウェアをインストールして使用してください。
機能ブロック図
テスト・セットアップの機能ブロック図を図27に示します。


セットアップ
EVAL-CN0368-SDPZの120ピン・コネクタをEVAL-SDP-CB1Zのコネクタに接続します。120ピン・コネクタの両端にある穴を利用し、ナイロン製ハードウェアを使って2枚の基板をしっかり固定します。
電源をオフにして、6VのDCバレル・ジャックをコネクタJ4に接続します。EVAL-SDP-CB1Zに付属のUSBケーブルをPCのUSBポートに接続します。この時点では、まだUSBケーブルをSDPボード上のミニUSBコネクタに接続しないでください。
ネオジム磁石をICの上面に直接、またはICと磁石の距離を最小にした磁石回転用治具に取り付けます。
センサーの出力電圧は浮遊磁界により誤差を生じる恐れがあるので、他の磁界発生源をICから遠ざけることが重要です。
テスト
DCバレル・ジャック(コネクタJ4)に給電します。CN0368評価用ソフトウェアを起動し、PCからのUSBケーブルをEVAL-SDP-CB1ZのミニUSBコネクタに接続します。
USB通信が確立すると、EVAL-SDP-CB1Zボードを使用して、EVAL-CN0368-SDPZとの間でシリアル・データの送受信および収集を行うことができます。
EVAL-SDP-CB1Zについては、SDPユーザー・ガイドを参照してください。
テスト・セットアップとキャリブレーションについての詳細、およびデータ・キャプチャのための評価用ソフトウェアの使用方法については、CN-0368ソフトウェア・ユーザー・ガイドに記載されています。