



製品概要
機能と利点
- 自律型ロボットおよび車両アプリケーション向けのマシン・ビジョンとリアルタイム・センサー・フュージョンに対応したエッジ・コンピューティング・プラットフォーム
- 8系統のGMSL2カメラ・インターフェース(最大6Gbps/チャンネル)
- 10GbpsのSFP+イーサネット・インターフェース
- ホスト・システムや他の末端デバイスとの同期を実現するIEEE 1588高精度時間プロトコル
- 高度な組込み処理機能
- ROS2準拠
- 統合を容易にする組込みGUI
- 高度なカメラ・トリガ機能と制御機能
- カスタム・アプリケーション開発に適したオープンソース・ソフトウェア・スタックとFPGA設計
製品概要
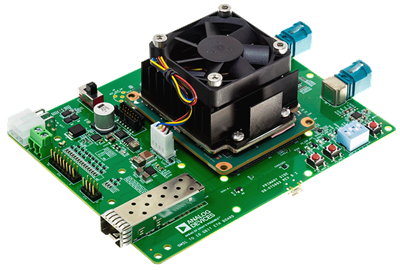
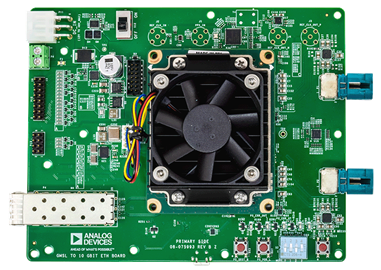
ADRD8012-01Zは、8系統のギガビット・マルチメディア・シリアル・リンク™(GMSL)インターフェースから10Gbイーサネット・リンクへの低遅延データ転送を可能にするエッジ・コンピューティング・プラットフォームです。対象となるアプリケーションには、マシン・ビジョンとリアルタイムのセンサー・フュージョンが重要となる自律型ロボットや車両などが含まれます。
システムには、GMSL2/1からCSI-2へのクワッド・トンネリング・デシリアライザであるMAX96724が2個搭載され、8台のGMSLカメラを接続できます。カメラからのビデオ・データは、MAX96724デシリアライザからMIPI CSI2インターフェースを介してAMD KV26システム・オン・モジュールに転送されます。このモジュールは、すべてのGMSLカメラからのビデオ・データを10Gbイーサネット・リンクに集約するロジックを実装し、中央処理装置に送信できるようにします。
ハードウェア・タイムスタンプを備えたIEEE 1588高精度時間プロトコル(PTP)がサポートされており、ホスト・システムや他の末端デバイスとの正確な同期が可能になっています。10Gbイーサネット・インターフェースとPTPロジックに必要なクロックの生成には、AD9545(クワッド入力、10出力、デュアルDPLL/IEEE 1588、1ppsシンクロナイザおよびジッタ・クリーナー)が使用されます。
ソフトウェア・ネットワーク・スタックを使用することで、10Gbイーサネット・リンクを介した通信を実現できます。システムではLinuxが動作しているため、gstreamerなどのツールを使用してビデオ・データをホストに送信でき、ssh経由でシステムへのリモート接続が可能です。ソフトウェア・ネットワーク・スタックには、達成可能な最大転送速度の点で制限があります。そのため、FPGAで高速化したUDPまたはTCPを実装し、リアルタイム転送プロトコル(RTP)を使用してデータをパケット化することもできます。これにより、10Gbイーサネット・インターフェースで達成可能な最大のデータレートを実現できます。
専用のFPGAロジックにより、カメラの正確なトリガ制御が実現されており、周波数と位相の設定が可能なほか、内部ロジックと外部信号のいずれかをトリガ・ソースとして選択することもできます。
ソフトウェアで設定可能な機能を備えた16個の汎用I/Oピンが利用可能で、3.3Vの電圧レベルで動作します。RS232の専用インターフェースを使用すると、GNSSデバイスなどのUARTペリフェラルを接続できます。
システムの設定と制御用にWebベースのユーザ・インターフェースが用意されており、カメラ制御とトリガ、PTP、GPIO、システム診断の視覚化などに関連する各種パラメータの設定が可能です。
この設計にはオープンソース・ソフトウェア・スタックとFPGA設計、リファレンス・アプリケーションが付属しており、実績のある実装を基にカスタム・ソフトウェア開発を開始できます。
アプリケーション
- 自律型ロボット、自動運転車
マーケット&テクノロジー
対象となる製品
関連資料
-
ADRD8012-01Z Design Support Files2025/08/26ZIP24 M
-
ADRD8012-01Z User Guide (GitHub)2026/04/16