質問:
高電圧を使用するアプリケーションで、反転昇降圧トポロジを利用したいと考えています。適切なインダクタを簡単に選択する方法はありませんか?

回答:
まず、デューティ・サイクルに関する簡単な式を使用して、回路の出力電圧/入力電圧とインダクタの電流リップルの関係を表すグラフを作成します。そのグラフを基にしてインダクタの適切な値を算出します。最後に、LTspice®によるシミュレーションを実行し、インダクタの値の妥当性を確認します。
はじめに
アプリケーションによっては、負電圧を供給する電源レールが必要になることがあるでしょう。それを具現化する方法としては、いくつかのトポロジが考えられます。これについては、稿末に示した参考文献1「The Art of Generating Negative Voltages(負電圧を生成する優れた方法)」で詳しく解説されています。ただ、入力電圧/出力電圧の絶対値が24Vを超える可能性があり、必要な出力電流が数Aにも達する可能性がある場合には、利用できる手段が限られます。まず、負電圧を生成できるLDO(低ドロップアウト)レギュレータやチャージ・ポンプは、多くの出力電流を供給することができないので候補から外れます。また、フライバック・コンバータとĆukコンバータは、磁気部品が主な原因となってソリューションのサイズが大きくなります。そのため、採用が難しいケースが多いはずです。したがって、高電圧/大電流を扱うという条件下では、反転昇降圧トポロジが主要な候補になります。同トポロジは、高い効率と小さなフォーム・ファクタのバランスがとれた最善の策になり得ます。
しかし、反転昇降圧トポロジのメリットを活かすには、高電圧の条件下におけるその動作を完全に理解しなければなりません。以下では、まず同トポロジについて簡単におさらいします。その上で、反転昇降圧、降圧、昇圧の各トポロジの重要な電流経路についての比較を行います。
3種の基本的な非絶縁型トポロジ
非絶縁型、スイッチング方式のDC/DCコンバータのトポロジは、大きく3種類に分けられます。それらのうち1つが反転昇降圧トポロジです。3種のトポロジは、いずれも制御用のトランジスタ(一般的にはMOSFET)、ダイオード(ショットキー・ダイオードまたはアクティブ・ダイオード[同期型MOSFET])、蓄電素子として機能するパワー・インダクタで構成されます。これら3つの素子が共有する接点をスイッチング・ノードと呼びます。トポロジの種類は、スイッチング・ノードに対するパワー・インダクタの位置によって決まります。
スイッチング・ノードと出力の間にインダクタを配置した場合、降圧型のDC/DCコンバータが実現されます。以下では、これを単に降圧と呼ぶことにします。入力とスイッチング・ノードの間にインダクタを配置すると、昇圧型のDC/DCコンバータが得られます。以下、これを昇圧と呼ぶことにします。そして、スイッチング・ノードとグラウンド(GND)の間にインダクタを配置すると、反転昇降圧型のDC/DCコンバータが得られます。本稿では、このトポロジを反転昇降圧と呼んでいます。
いずれのトポロジにおいても、スイッチングが行われる際には、連続導通モード(CCM:Continuous Conduction Mode)であっても電流が急速に変化するコンポーネントと基板パターンが存在することになります。それに伴い、図1(c)、図2(c)、図3(c)で強調表示しているようにノイズの大きい遷移が発生します。回路から生じる放射性の電磁干渉(EMI)を低く抑えるには、ホット・ループのサイズを小さく抑えなければなりません。ここで注意が必要なのは、ホット・ループは必ずしも電流が循環する物理的なループであるわけではないということです。図1、図2、図3のホット・ループの部分に注目してください。同ループを形成するコンポーネントと経路において、急峻な電流遷移の向きは、赤色で示された部分と青色で示された部分で逆になっています。






図3に示したのは、CCMで動作する反転昇降圧トポロジの例です。ご覧のように、ホット・ループはCINC、Q1、D1で構成されています。降圧トポロジ、昇圧トポロジのホット・ループとは異なり、反転昇降圧トポロジのホット・ループには、入力側のコンポーネントと出力側のコンポーネントが含まれます。制御用のMOSFETがオンになる際、ダイオード(同期型MOSFETを使用する場合にはボディ・ダイオード)の逆回復によって最大のdi/dtとEMIが生成されます。これら2つの要因による放射性EMIを抑制するには、基板のレイアウトについて綿密な検討が必要になります。入力電圧/出力電圧が高い場合に、反転昇降圧に必要なインダクタンスを過小に見積もって、インダクタの過剰な電流リップルが原因で大きな放射性EMIが生成されるのは何としても避けなければなりません。よりなじみ深い昇圧トポロジの知識に頼って反転昇降圧回路のインダクタの値を見積もってしまった場合、そのようなリスクを抱えてしまうことになりがちです。以下、両トポロジの比較を通してその理由を説明します。
高電圧対応の反転昇降圧トポロジについての検討事項
昇圧トポロジでも反転昇降圧トポロジでも、入力電圧より絶対値が大きい出力電圧を生成することができます。しかし、両者には明確な違いがあります。その違いは、以下に示す式(1)と式(2)で説明することができます。これらは、それぞれCCMにおける両トポロジのデューティ・サイクルを表しています。いずれも1次近似式であり、ショットキー・ダイオードとパワーMOSFETの電圧降下などの影響は考慮していません。この点には注意してください。


図4(左)は、両トポロジにおけるデューティ・サイクルの一次近似値と¦VOUT¦の関係を表したものです。このグラフでは、VINが12Vの場合を例にとっています。一方、図4(右)は、両トポロジにおけるインダクタの電流リップルとVOUTの関係をプロットしたものです。このグラフは、スイッチング周波数fSWが1MHz、パワー・インダクタのインダクタンスが1μHという条件で作成しました。


図4を見ると、反転昇降圧と昇圧においてデューティ・サイクルが50%を上回る場合、¦VOUT¦の最小値はそれぞれ12Vと24Vになっています。つまり、反転昇降圧では昇圧と比べて最小値がはるかに低くなることがわかります。その理由は、図5を吟味することで理解できます。
昇圧の場合、インダクタは入力と出力を結ぶ経路上に存在します。それにより、パワー・インダクタの電圧VLがVINに追加され、必要なVOUTが得られます。それに対し、反転昇降圧では、VLだけによって出力電圧を得ます。つまり、パワー・インダクタは、昇圧の場合よりもはるかに多くのエネルギーを出力する必要があります。そのため、昇圧と比べてはるかに低い¦VOUT¦でデューティ・サイクルが50%に達します。


上に示した検討結果から、次のようなことが言えます。¦VOUT¦/VINの低下に伴うデューティ・サイクルの低下は、反転昇降圧の方が昇圧よりも格段に緩やかになります。これは、設計時に検討しなければならない重要な事実です。図6を見ると、その影響をより詳細に理解できます。


図6は、デューティ・サイクルの一次近似値とインダクタの電流リップルについて、VINを横軸としてプロットしたものです。ご覧のように、インダクタの電流リップルΔILは、VINとDに比例します。昇圧の場合、VINがVOUTの1/2よりも高くなると、デューティ・サイクルはVINの上昇に伴って急激な傾きで低下します。図6(左)の青色の曲線で示しているように、VINが24Vの場合は50%ですが、VINが42Vの場合にはその1/4まで低下します。その結果、昇圧におけるΔILは、図6(右)のようにVINが24Vを超えると急激に低下します。
それに対し、反転昇降圧の場合には、図4に示したとおり、¦VOUT¦/VINが低下するとき(固定値の¦VOUT¦に対してVINが上昇するとき)、Dは非常に緩やかに低下します。これについては、図6(左)の緑色の曲線によって確認できます。VINが48Vから78Vまで上昇(62.5%増)しても、デューティ・サイクルは25%しか低下していません。Dの低下によってVINの上昇が相殺されないので、インダクタの電流リップルはVINの増加と共に大きく増加します。これについては、図6(右)の緑色の曲線によって確認できます。
高電圧の条件下において、反転昇降圧では昇圧よりもインダクタの電流リップルが大きくなる可能性があります。そのため、反転昇降圧では、同じfSWで動作させる場合、昇圧と比べてインダクタの値を高く設定しなければなりません。以下では、これについて図7を基により具体的に考えてみましょう。なお、図7も一次近似値に基づいて作成したものです。


入力電圧範囲が広く、出力電流が多いアプリケーション
ここでは、VINが7V~72V、VOUTが-12V/5Aのアプリケーションについて考えます。出力電流が多いので、高い効率を得るために同期式の反転型コントローラ「LTC3896」を使用することにします。
インダクタの値の選択
LTC3896をCCMで動作させる場合には、ΔILをIOUT,MAXの30%~70%に維持することが推奨されます。この例ではIOUT,MAXは5Aなので、ΔIが入力電圧範囲の全体にわたり1.5A~3.5Aに維持されるように設計します。なお、IOUT,MAXの30%~70%という推奨範囲内に維持するということは、入力電圧範囲における電流リップルの最大値と最小値の比は、最大2.33(70%/30%)までしか許されないということを意味します。ここまでに説明したように、ΔILがVINに応じて大きく変化する反転昇降圧のようなトポロジの場合、この制約を満たすのは容易ではありません。
図7から、fSWが1MHz、Lが1μHという条件では、インダクタの電流リップルは4.42A~10.29Aになります。つまり、その差は大きすぎます。ΔILを1.5A(IOUT,MAXの30%)という推奨下限値に合致させるには、4.42Aを1/3に減らさなければなりません。これは、LTC3896のFREQピンに47.5kΩの抵抗を接続してfSWを300kHzに設定し、インダクタの値を10μHに設定すれば実現できます。その結果、ΔILは(1μH×1MHz)/(300kHz×10μH) = 1/3に減少します。
このような調整により、インダクタの電流リップルΔILは、入力電圧範囲の全体にわたり約1.5A~3.4A(IOUT,MAXの30%~68%)に維持されます。つまり、推奨範囲内に収まるはずです。図8に、LTC3896のデータシートの最終ページに掲載されている回路図を転載しておきます。


LTspiceにより、インダクタの値の妥当性を確認する
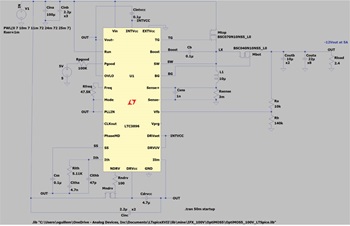
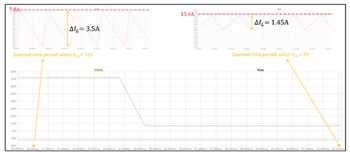
インダクタの電流リップルについては、LTspiceによるシミュレーションを実施することで、より正確な値を得ることができます。図9に示したのは、その際に使用するLTC3896ベースの回路図です。図10において、ΔILはVINが7V、72Vの場合にそれぞれ約1.45A、3.5Aとなっています。これは、図7を基にしてfSWとLの値を調整することで得た先ほどの一次近似値とマッチしています。なお、図10で取得したインダクタの電流は、RSENSEに流れ込む場合に正の値になることに注意してください。
LTspiceによるシミュレーションを行えば、動作中にインダクタに流れるピーク電流も確認できます。最小入力電圧である7Vにおける値がピークになります。図10を見ればわかるように、このアプリケーションでは、インダクタのピーク電流は15.4A近くに達します。この値を把握することにより、十分に高い電流定格値を備えるパワー・インダクタ製品を選択することができます。


出力電圧が更に高い場合の設計
ここで、もう一度図7をご覧ください。すると、VINが12V~40V、VOUTが-150Vという仮想的なケースの電流リップルの値もプロットされていることがわかります。
そのプロットを見ると、fSWとLの値が同じ条件である場合、VOUTが高いと電流リップルが格段に大きくなることがわかります。一般に、ここまで大きなΔILは許容されません。したがって、先ほど以上の更なる調整が必要になります。すなわち、同じfSWに対して必要なインダクタの値は更に大きくなります。
もう1つ確認していただきたいのは、入力電圧範囲の全体にわたるΔILの値の範囲です。VOUTが-12Vの場合、入力電圧が10倍以上に上昇しても、電流リップルの最小値と最大値の比は約2.33でした。それに対し、VOUTが-150Vの場合、入力電圧は12Vから40Vまで(3.33倍)しか上昇していないのにΔILは2.85倍に増えています。
幸い、この問題が生じるのはCCMの場合だけです。不連続導通モード(DCM:Discontinuous Conduction Mode)の場合には、IOUT,MAXの30%~70%に収めるといった制約はありません。いずれにせよ、IOUT,MAXが5Aで、12VのVINから-150VのVOUTへの変換を1ステップで行うのは容易ではありません。どのような場合でも、そうした電圧変換が必要であるなら、出力電流の要件は一般的にさほど厳しくないのでDCMで動作させることになるでしょう。
図11に示したのは、反転型DC/DCコントローラ「LTC3863」のデータシートの最終ページに記載されている回路図です。この回路は、上記のような条件に対応するためのものです。この例では、同ICをDCMで動作させます。必要なDC電流の値が低いので、LTC3863のような非同期型のコントローラを使用することでも十分に許容できる効率が得られます。LTspiceで提供されているLTC3863ベースの回路を使用すれば、インダクタの最適な値を容易に選択することができます。


まとめ
反転昇降圧トポロジのホット・ループには、入力側と出力側のコンポーネントが含まれます。そのため、降圧や昇圧のトポロジと比較して、基板レイアウトの難易度が高まります。
反転昇降圧トポロジには、昇圧トポロジと類似する部分があります。ただ、インダクタが、出力を生成するための唯一のエネルギー源になる点が大きく異なります。そのため、(出力容量を無視すると)同じアプリケーションの条件下における電流リップルが格段に大きくなります。
入力電圧/出力電圧が高い反転昇降圧アプリケーションでは、インダクタの電流リップルは更に大きくなる可能性があります。それを抑制するには、昇圧トポロジの場合よりも値の大きいインダクタが必要です。本稿では、具体的な例を示しながら、アプリケーションの条件に応じてインダクタの値を調整する方法を紹介しました。
参考資料
1Frederik Dostal「“The Art of Generating Negative Voltages(負電圧を生成する優れた方法)」Power Systems Design、2016年1月
