
Advanced Driver Assistance Systems (ADAS) and Safety Solutions
Analog Devices’ innovations for ADAS solutions are aimed at enabling efficient and precise operations, reducing design complexity, and accelerating your time to market. We deliver precision sensing, intelligent power management, and high-speed connectivity, which are supportive of sensor fusion and processing from camera, radar, and LIDAR systems.
Explore Applications in Advanced Driver Assistance Systems (ADAS) and Safety Solutions
-
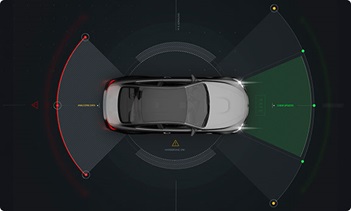
Advanced Driver Assistance Systems (ADAS) Camera Solutions

-
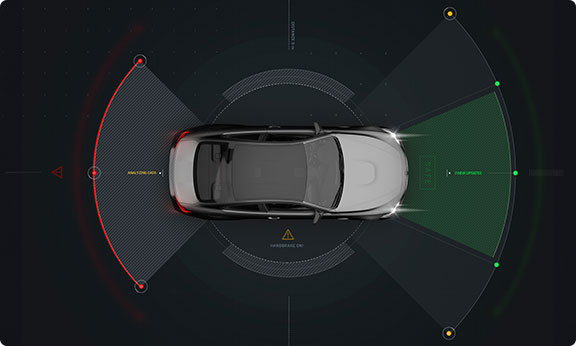
Advanced Driver Assistance Systems (ADAS) Sensor Fusion ECU Solutions
-
Driver and Occupant Monitoring Systems (DMS, OMS)




Achieve faster Time to Market with Our Next-Gen ADAS Solutions
Our ADAS solutions, including precision sensing, intelligent power management, high-speed connectivity, and data integrity ensure easy and comprehensive design with faster time to market.
ADAS capabilities are enabled by a plethora of sensors deployed across the car which are networked to I/O modules, actuators, and controllers throughout the automobile. These additional intelligence, networking, and controls are enabled by advances in sensing, connectivity, processing, and cloud computing that crystallize in the ECU. Advanced vehicles require close to a hundred ECUs, each taking power from the car battery with the intermediation of on-board converters. Each ECU is dedicated to a specific function and incorporates power regulation, a processing unit (MCU), and the means to receive data from sensors, drive actuators, and display information.
There is a growing need for evolving ADAS solutions to combine efficient power management in smaller footprints as well as high-speed links, complex interconnects, and data integrity. We consider power management capabilities early in the system design effort and work closely with our customers to deliver high-efficiency, low-noise automotive power solutions that minimize external components while the connectivity enabled by our Gigabit Multimedia Serial Link™ (GMSL) technology enables flexible ADAS architectures with a high bandwidth and scalable safety ready portfolio. We look at the complete system to reduce your design complexity, size, and time to market while offering various levels of ASIL capability to satisfy heightened levels of safety requirements.
Key applications include:
- Camera systems
- Emergency vehicle detection systems
- Radar and LIDAR systems
- Electric vehicle warning sound systems (EVWSS)
- Driver monitoring systems (DMS)
- ADAS and safety ECUs

Thought Leadership

Video
Jul 31, 2025
The Future of In-Car Customization


Video
Jun 5, 2025
00:49ATC 2025: Smart Helmet Solution

Video
Jun 5, 2025
00:50ATC 2025: Industrial Network of the Future

Video
Jun 5, 2025
00:47ATC 2025: In-Ear VSM Solution

Video
Mar 24, 2025
01:07Analog Devices - Powering the Future

Video
Nov 19, 2024
01:20MAX9295D GMSL2 6 Gbps Dual CSI-2 Serializer with GMSL1 Compatibility.

Article
Nov 8, 2024
An Intelligent Nervous System Drives a Resilient, Software-Defined Vehicle
Analog Dialogue
Aug 14, 2024
Considerations for the Output Current and Voltage Ripple in a Multiphase Buck with Coupled Inductors
Video
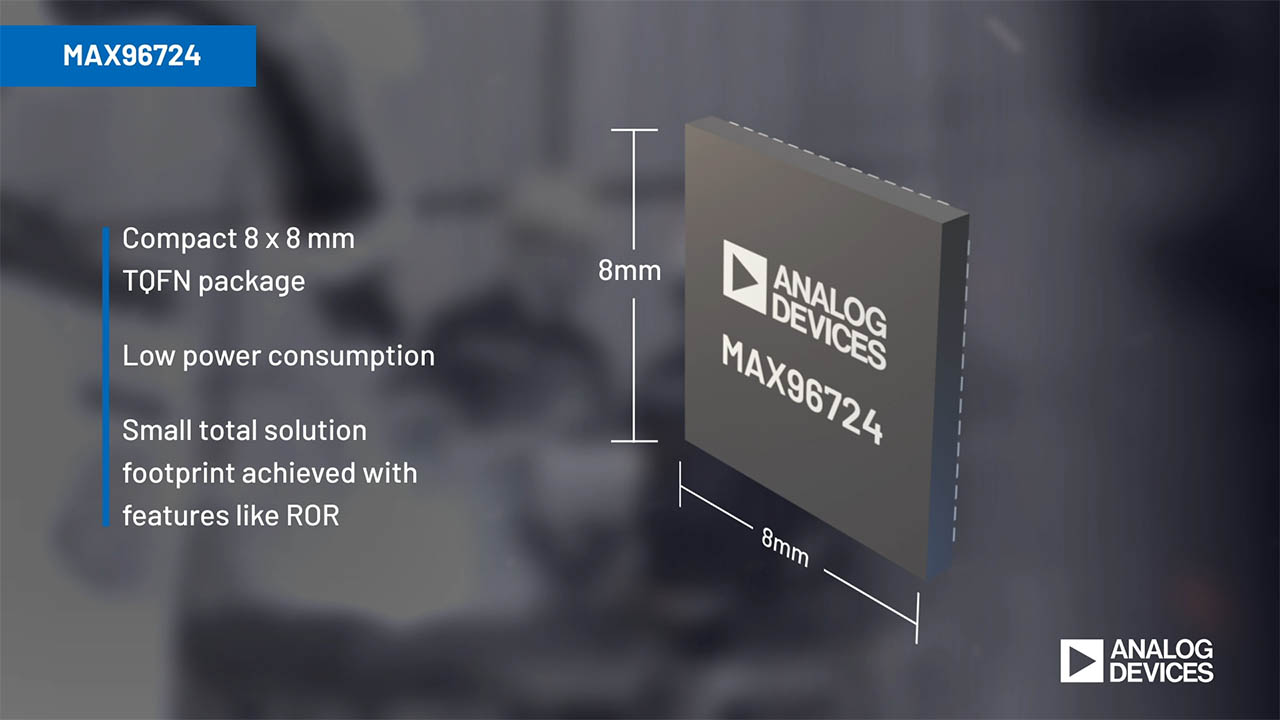
Jul 15, 2024
01:22MAX96724 GMSL2 6Gbps Quad Deserializer

Video
Jun 26, 2024
00:10Motor Control: High-Speed Precision Current Sensing

Technical Articles
Jun 5, 2024
Leveraging a Hardware Agnostic Approach to Ease Embedded Systems Design: The Basics
Technical Articles
Oct 31, 2023
Multiphase Designs, Decisions, and Trade-Offs with Trans-Inductor Voltage Regulators
Technical Articles
Oct 30, 2023
Choosing an Off-Battery Power Management Integrated Circuit for Powering Automotive Electronics

Video
Jul 12, 2023
04:26Cybersecurity for Industrial IACS and Medical IoT
Analog Dialogue
Jul 1, 2023
A Comprehensive Guide to LDO Regulators: Navigating Noise, Compromise, Applications, and Trends

Webcast
Mar 17, 2023
Improving Switch-Mode Power Supplies Using Noise Cancelling Technology

Video
Feb 17, 2023
CES Event: How Sustainability Is Driving In-Cabin Experiences

Video
Oct 4, 2022
01:33Why Every Car Needs These High-Speed Serial Links
Video
Oct 3, 2022
01:02MAX25240/39: HV Low Iq 6A/4A Buck-Boost Converter 400kHz/2.1MHz

Video
Sep 23, 2022
01:04ADXL367: Nanopower 3-Axis Digital MEMS Accelerometer
Webcast
Aug 23, 2022
Accelerating Design Process and Time-to-Market with Synopsys Saber Models for ADI Components

Video
Jul 27, 2022
02:23ADI Silent Switcher Technology
Webcast
Apr 27, 2022
Behavioral Sources, Parameters, and Expression Evaluation in LTspice

Video
Apr 26, 2022
06:20ADI's New E2B 10BASE-T1S Technology
Technical Articles
Mar 28, 2022
How to Design Better High Current Switching Power Supplies for Vehicle ADAS

Video
Mar 8, 2022
01:00AD3552R 16-Bit, 33 MUPS, Multispan, Multi-IO SPI DAC

Video
Jan 3, 2022
02:28What If a Question Could Change the World?
Webcast
Nov 30, 2021
MEMS IMUs in Autonomous Vehicle Navigation
Webcast
Nov 17, 2021
HDMI2.1 - 8K rich displays, 4K120 gaming, immersive audio. What it takes to successfully design world class HDMI2.1 AV products.
Technical Articles
Oct 21, 2021
Condition Monitoring System Design Choices and Their Impact on Signal Chain Implementation
Webcast
Oct 20, 2021
Simulated Phased Array Beam Stabilization Demo using ADIS16480 & MATLAB Phased Array System Toolbox Webinar
Webcast
Sep 21, 2021
Analog Devices connectivity solutions bridge physical and digital worlds in the car
Thought Leadership Page
Sep 2, 2021
Why 10BASE-T1S Is the Missing Ethernet Link for Automotive Communications
Technical Articles
Aug 1, 2021
How to Effectively Design and Optimize the TIA Interfaces of LIDAR Systems
Webcast
Feb 4, 2021
Stabilization and Pointing for Radar and Phased-Array Systems
Video
Jan 18, 2021
06:11Single-Pair PoE by Analog Devices
Thought Leadership Page
Jan 1, 2021
Modern LIDAR Systems: Sensing for Every Industry

Video
Dec 18, 2020
01:01LTC4238: High Voltage High Current Hot Swap Controller
Technical Articles
Nov 1, 2020
Seeing Farther with LIDAR Using Tracking

Video
Oct 20, 2020
03:24Superimposed AC/Audio Tests of the LT8210
Analog Dialogue
Oct 2, 2020
LIDAR for Autonomous System Design: Object Classification or Object Detection?
Technical Articles
Aug 1, 2020
Ultralow Noise, High Current, Compact DC-to-DC Converter Solution for Signal and Data Processing Circuits

Video
May 6, 2020
01:00Dual Channel 8.5A, 18V, Synchronous Step-Down Silent Switcher
Thought Leadership Page
Apr 1, 2020
From ADAS to Driver Replacement—Is Actual Radar Performance Good Enough?
Technical Articles
Apr 1, 2020
Bipolar, Bidirectional DC-to-DC Supply Sources and Sinks Current from 5 V to 24 V Input

Video
Mar 6, 2020
01:29AD-FMCLIDAR1-EBZ: LIDAR Developmemt Platform by Analog Devices

Video
Feb 27, 2020
01:00LT8365 High-Voltage Micropower Boost/SEPIC/Inverting Converter

Video
Feb 27, 2020
03:24LT8210 Buck-Boost Controller with Pass-Thru Superimposed AC Demo
Thought Leadership Page
Feb 1, 2020
Radar, the Car’s Virtual Eye

Video
Jan 24, 2020
00:47Accelerating Autonomous Transportation (Excerpt)
Files and Downloads

Silent Switcher Technology
![]()
1.74 M
AN-204: Applications of the SMP04 and the SMP08/18 Quad and Octal Sample-and-Hold Amplifiers
![]()
945 kB
EE-444: Guidelines For Optimal Use Of eMSI on ADSP-SC598 SHARC+ Processor Family
![]()
731.39 K
MAXREFDES1093: Miniature, 5V/1A, Synchronous, No-Opto Flyback DC-DC Converter with 92% Efficiency Using MAX17690 and MAX17606
![]()
643.26 K
Understanding Silent Switcher Technology: High Efficiency, Low EMI eBook
![]()
7.75 M
ADDI9036: CCD TOF Signal Processor with Programmable Timing and V-Driver Data Sheet
![]()
94.91 K
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}