LIDARシステムのTIAインターフェースを効果的に設計し最適化する方法
はじめに
本稿では、トランスインピーダンス・アンプ(TIA)の様々な入力カップリング・オプションの効果について検討し、各ケースにおける見落としやすい影響を明らかにしていきます。目的は、エンジニアがLIDARシステムのTIAインターフェースを効果的に設計し最適化するのを助けることにあります。ここでは、高ゲインの光学検出器をTIA入力にカップリングする際の設計上の課題に焦点を当てます。
LIDARの入力は些細な問題ではなく、このプロセスには多くの変動要素が関わってきます。シグナル・チェーンは、どの設計を選択するかに応じて異なったものになるので、予めすべてのオプションを検討したうえで自分のプロジェクトに最も適したものを選ぶことが重要です。
LIDARに関する課題
ToF(Time of flight)型LIDARレシーバーのシグナル・チェーン設計には多くのトレードオフが必要で、そのためにイメージング・システムの性能が低下する可能性があります。TIAとその検出器の間のインターフェースもこの課題の1つであり、マルチチャンネル・スイッチング機能を備えたトランスインピーダンス・アンプでは特に重要な問題となります。
LIDARレシーバーのビルディング・ブロック
ToF型LIDARシステムは、送信シグナル・チェーンと受信シグナル・チェーンで構成されます。送信部分が光子のパルスを対象物に送って、受信部分がそのパルスの振幅と特性を測定します。光が送られてから検出されるまでの時間が分かれば、その間に移動した距離も分かります。図1に示すように、最も基本的な受信シグナル・チェーンは、光検出器、TIA、A/Dコンバータ(ADC)で構成されます。マルチチャンネル・アプリケーションでは、ADCの数を減らすためにマルチプレクサが使われます。光検出器に光子が当たると電流が生成され、この電流がTIAによって電圧に変換されます。さらにこの電圧が、ADCによってデジタル値に量子化されます。量子化器としてよく使われるもう1つの選択肢は、図2に示すようにコンパレータと時間デジタル変換器(TDC)を使う方法です。これらのTDCシステムはコストと電力を一桁低く抑えることができますが、そのトレードオフはシステム性能が劣ることです。また、TDCにはマルチプレクサを使わないのが一般的ですが、これを実装してTDCとコンパレータの数を減らすこともできます。


図1. ADCで量子化を行うLIDARレシーバー・シグナル・チェーン


図2. TDCで量子化を行うLIDARレシーバー・シグナル・チェーン
検出器のタイプは3つに大別されます。フォトダイオードは光子を電子に変換する検出器ですが、光学的な増幅は行わないため、このタイプはこれらのアプリケーションには一般的な選択ではありません。LIDARシステムで一般的な検出器は、アバランシェ・フォトダイオード(APD)です。APDは接合部のブレークダウンまで逆バイアスをかけられるフォトダイオードで、光学的な増幅が行えるという利点があります。3つめの検出器タイプは、シングル・フォトン・アバランシェ・ダイオード(SPAD)です。SPADには、高いバイアス電圧を使って逆バイアスがかけられます。このバイアス電圧には、ブレークダウン電圧と、SPADのガード・リングに対応するもう1つのより高いブレークダウン電圧の間の値が使われます。このバイアスをかけた状態で1個の電荷キャリアを空乏層に注入すると自動継続的なアバランシェ現象をトリガすることができ、検出器では実質的に数千単位のゲインが得られます。SPADは感度に優れているので、このタイプを選択するのが自然に思えるかもしれません。しかし、LIDARシステムは現実世界における様々な影響に対処しなければならず、ゲインが大き過ぎると受信チェーンが容易に飽和してしまう結果となります。また、ゲインが大きくなればノイズも増えます。これは過剰ノイズ指数(ENF)と呼ばれます。ENFはバイアスと指数的な関係にあり、ゲインが大きすぎると、検出器のS/N比(SNR)が悪化するおそれがあります。幸いなことにAPDでは両者の間でうまく妥協が図られており、この用途にとって十分な光学的ゲインを提供しますが、S/N比に悪影響を与えるENFはそれほど大きくありません。
APDに光子が当たると、接合部に電子とホールのペアが生成されます。APDの強い電界はスリングショットのような役割を果たして電子を加速し、より多くの電子を打ち出します。このため、受け取った光子1個あたりの放出電子の数が増加します。これはアバランシェ効果と呼ばれ、大きな増倍率(Mファクタ)を実現します。このゲインはバイアスに依存するもので、一般にTIAがそのノイズ・フロアによりS/N比の制限要素となっているので、このゲインによってより弱い信号を使用できるようになります。その目的は、シグナル・チェーン内にある次段のノイズ・フロアをマッチングすることにあります。この場合は、システムのS/N比を最適な値とするため、APDに十分なゲインを持たせてシグナル・チェーンのノイズよりわずかに大きくすることによって、TIAのノイズ・フロアにマッチングします。このノイズ・マッチングの考え方は、センサーのノイズ・フロアが制限要素とならないシグナル・チェーンの多くで広く使われています。実際には、このレシーバーの性能向上は検出範囲の拡大という形で現れてきます。APDのもう1つの重要な利点は、飽和からの回復が速いことです。この場合も制限要素となるのはTIAで、飽和時間を短くしてLIDARシステムの機能停止を避けるために、LIDAR専用のTIAが設計されました。APDで唯一不都合な点は、バイアス点が比較的高く(数百ボルト)、それに対応する温度係数も大きいことです。
LIDARには、TIAに関して特有の条件があります。低電流ノイズと高帯域幅はすべての光学アプリケーションに共通する特徴ですが、低消費電力は欠かすことのできない条件です。電流システムには64以上のTIA PADチャンネルがあるので、システムのパワー・バジェットはすぐに余裕のない状態となってしまう可能性があります。したがって、TIAを使用しない場合は低消費電力モードが必要です。また、これらのデバイスのパワー・バジェットを最適化するには、ウェークアップを高速に行う必要があります。最新のLIDAR TIAを実現するためのもう1つの条件は、飽和状態となったときには回路をクランプし、入力換算ノイズと帯域幅のバランスを取ってトレードオフを行うことです。通常の光学シグナル・チェーンとLIDARの大きな違いの1つが環境です。ファイバ・アプリケーションの場合、システムは外界から遮断されていて非常に安定しています。しかし、LIDARの場合は太陽や他のLIDARシステムへの対策を講じる必要があります。太陽は、受信チェーンの線形範囲を飽和させるようなDC入力を発生させる可能性があります。これは、この種のシステムを設計する際にエンジニアが最初に解決しなければならない課題の1つです。残念ながらこの課題を解決するのは容易ではなく、本稿でも以下で検討していきます。
入力ACカップリングに関する考慮事項
DC信号をブロックする簡単な方法で、多くのエンジニアが実装を試みたものの思わしい結果が得られなかった方法について検討してみましょう。これは、APDとTIAの間にACカップリング・コンデンサを接続するというものです。コンデンサを配置すればDCの影響を緩和することができますが、これは新たに一連の問題を発生させる結果となります。
RCトレードオフ
まず、TIAの入力にACカップリング・コンデンサを追加すると、検出器にDCパスを接続する必要も生じます。図3に示すように、抵抗RBを配置することによってAPDのバイアス点を設定でき、CINでTIA入力をACカップリングすることができます。このバイアス・パスに伴う犠牲の1つは、APD電流の流れる並列パスが生じることです。この並列パスは信号を分離させるため、APDのゲインに悪影響を与えます。このAPDのゲイン低下の程度は、TIAの入力インピーダンスとRBの選択値の比率によって決まります。さらに、入力にAPDからの電流が加わるとコンデンサに電圧が生じるので、CINは回路に影響を与えます。この影響はコンデンサの電流積分特性によるもので、生じる電圧は時間内に流れる電流と容量値の関数です。目標は、CINを充電による影響を最小限に抑えられるよう十分に小さくする一方で、使用周波数の信号が通過できるよう十分に大きくする(インピーダンスを十分に小さくする)ことです。言葉を変えると、CINが大き過ぎると放電に時間がかかりますが、CINが小さ過ぎるとコンデンサ通過時の電圧低下(容量に対するパルスの相対時間スケールが長い場合は歪み)という形で信号の一部が失われてしまいます。これらの影響は、いずれもシグナル・チェーンの性能を著しく低下させます。

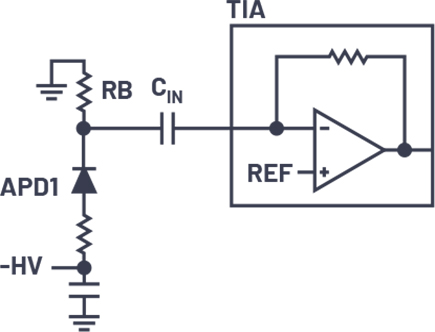
図3. TIAのACカップリングにはRBが必要。
RBとCINのサイズ設定
CINのサイズ設定が小さすぎると、フルスケール測定にどのような悪影響が生じるかを考えてみます。200MHzで33pFのコンデンサは24Ωの抵抗と同様の役割を果たし、RIN(通常のLIDAR TIAでは数百オーム程度)とともに分圧器を構成して、信号の実際の値を10%小さくします。信号に10%の損失があると、光学設計などの他領域を最適化するために苦労して行った作業の成果が簡単に帳消しになってしまう可能性があります。このDC除去用のACカップリング法に潜む落とし穴は、RBのサイズを決定する際に明らかになります。RBは、ゲインの低下を防ぐためにTIAの入力インピーダンスと比較して大きくする必要がありますが、その一方で飽和からの回復に悪影響を与えない程度に小さくする必要があります。RC時定数の選択は、検出器の入力信号が単極性であるという事実によって極めて難しいバランスが求められる作業となります。入力パルスの矩形波特性はこのRCで平均化され、TIAのダイナミック・レンジを狭めます。さらに、TIAは、チャンネル切替え時や出力マルチプレクシング使用時に、CINを充電する可能性があります。例えば、LTC6561を使用した場合、アクティブ・チャンネルのTIAの入力の公称値は1.5Vです。そのチャンネルが非アクティブの場合、入力の電圧は0.9Vに低下します。検出器とTIA入力の間にACカップリング・コンデンサを挿入した場合にチャンネルを再びアクティブにするには、コンデンサを再充電して1.5Vに戻す必要があります。マルチチャンネル・システムにおけるチャンネル・スイッチングの性能低下と入力カップリング・コンデンサの関係を、図4に示します。出力マルチプレクサも内部で同じように入力をディスエーブルするので、出力マルチプレクシング時間(OMUX)もチャンネル・スイッチングと同様の影響を受けます。再充電時間は第1段のRT抵抗によってさらに長くなります。この状況では制御ループが失われるので、通常この抵抗は数十キロオーム程度の値を取ります。TIAはシャットダウン・モードでは電力を節約するために入力段をシャットダウンしますが、ここでも同様の影響が生じます。各入力もその動作点まで電圧を上げる必要がありますが、これらは時定数が大きくパワーアップに時間がかかります。


図4. ACカップリング入力によるOMUXおよびチャンネル・スイッチング時間のグラフ。RB = 12kΩ。
TIAの飽和に関する考慮事項
この問題をより深く掘り下げていくと、飽和からの回復が最も重要な点になることが分かります。CINに大きい入力電流が加わった場合の出力を図5に示します。RBが2.2kΩ、CINが100pFの場合、ACカップリングされたTIAに10mAのパルスが与える影響を見ると、大電流パルスが加わった後の動作領域は明確に2つに分かれています。5nsの10mA入力パルスの後にはACコンデンサの充電に多くの電流が使われて、TIAの出力は暫くグラウンド・レールに止まります(レール時間)。このグラウンドへの出力飽和は入力が公称値の1.5Vよりはるかに低い値になったことによるもので、検出器の電流の大ききおよび時間の関数です。パルス電流が大きければそれだけ出力の飽和も長くなり、電圧がグラウンドまで低下します。次の動作領域は回復段階です。この回復段階の時定数は、RBおよびCINと相関関係にあります。


図5. 大電流時の飽和(CIN = 100pF、RB = 2.2kΩ)
条件の異なる2つのメカニズムを図6aと図6bに示します。これらの図を見れば、より視覚的に結果を把握することができます。合計回復時間は、入力がACカップリングされたTIAのレール時間と回復時間の総和です。RBの抵抗値を小さくして回復時間を短くしたくなるかもしれませんが、RBは検出器の並列パスでもあり、入力電流の一部が流れ込んでしまうという点に留意する必要があります。並列パスに流れ込む電流は、APDの全体的なゲインを低下させます。残念ながら、LIDARシステムは現実の世界で使われるものなので、他のシステムから大きな光パルスを受ける可能性があり、ナノ秒レーザー・パルスからの場合、飽和回復には数十マイクロ秒を要します。

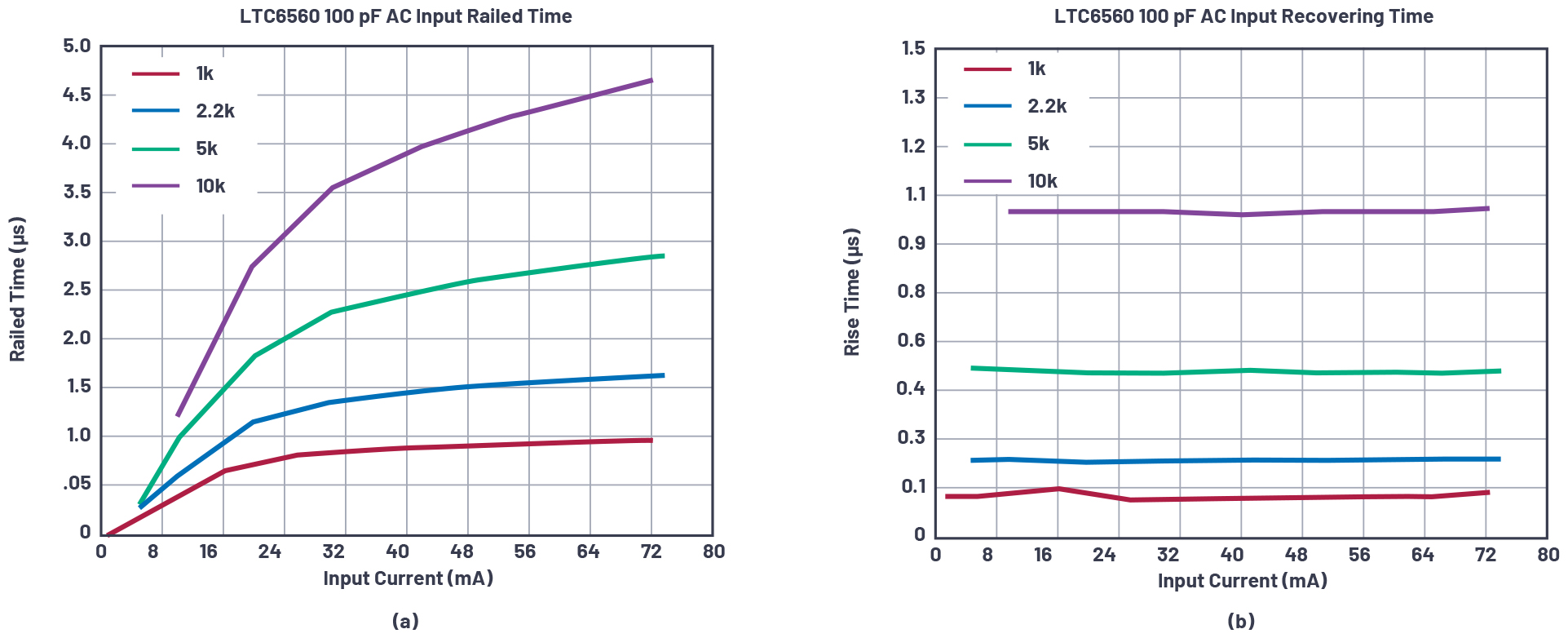
図6. (a) 様々なRB値でのレール時間 (b) 様々なRB値での回復立上がり時間
入力DCカップリングに関する考慮事項
DCカップリング入力は単純明快です。大まかに言うと、図7に示すDCカップリング入力を使用すればTIAを短時間で飽和から回復させることができ、またDCカップリングの制約となるものはTIAの飽和回復だけです。この方法の欠点は、DCがAPDからTIA入力へ流れることです。残念ながら、周囲光、暗電流、および検出器によって生じるリーク電流は、TIAの入力線形範囲の一部またはほとんどを使ってしまう可能性があります。このダイナミック・レンジの減少によって、基本的に受信チェーンのS/N比も減少します。周囲光が十分に強い場合はTIAのダイナミック・レンジが著しく減少し、ダイナミック・レンジがゼロになるとシステムが機能しなくなります。


図7. DCカップリングされたTIA入力。
周囲光を減らすための最も一般的な方法では、多くの場合、図8に示すような光学的フィルタリングか、図9に示すようなオフセット除去用の能動回路が使われます。光学的バンドパス・フィルタは、APDウィンドウかレンズに直接コーティングすることができます。光学的バンドパス・フィルタは周囲光の影響を高いレベルで軽減します。内部光学部品からの反射は大きい不要信号を発生させる可能性がありますが、この光学的フィルタはそれらの反射を減らす助けにはなりません。しかし、このフィルタは優れた第一防御策となります。能動DC除去回路は、反対方向の電流をTIAの入力に注入して入力DC成分を打ち消します。この方法には、TIA出力からその入力への閉ループが必要で、TIAのノイズ性能とスイッチング性能を確保するために細心の注意を払う必要があります。ここでは10k~100kのTIAゲインを考えているので、ループの安定性も課題となります。本稿では、これを実現するための回路的な手法やアーキテクチャについては扱いません。ここで非常に重要な点は、回路内の安定性と入力容量の条件が軽減された場合は、DCの除去が飽和回復に関して最大限の性能を実現するということです。ただし、これにはコストの増大と設計の複雑化が伴います。

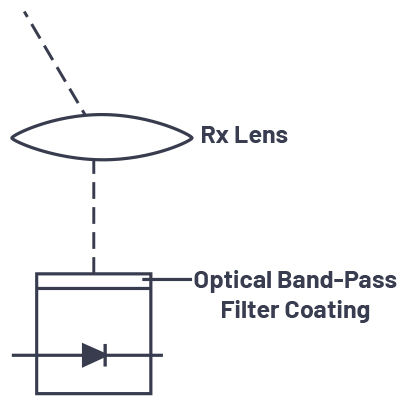
図8. ほとんどの周囲光を除去する光学バンドバス・フィルタ。

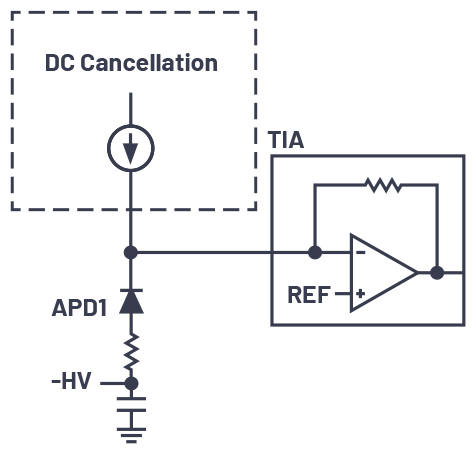
図9. DC除去方法。
相反する設計上の選択
LIDARに関してACカップリングとDCカップリングのどちらを選ぶか、あるいはTIA入力の電流除去をどのように行うかを考える際には、数多くのトレードオフが存在します。マルチプレクスLIDAR用受信アナログ・フロント・エンドの理想的な特性とは、ハイ・ダイナミック・レンジであること、回復が高速であること、周囲光を除去できること、そして低消費電力で帯域幅に制限がないことなどです。実際には、これらの特性のいくつかには相反する設計上の考慮事項が含まれています。
| 入力カップリング | DC | AC | DCおよび電流除去 |
| 長所 | 高速飽和回復 | 周囲光やADPリーク電流がある状態でも最大のダイナミック・レンジ | 周囲光やADPリーク電流がある状態でも最大のダイナミック・レンジ |
| 高速チャンネル・スイッチング | 迅速な飽和回復 | ||
| シンプルな設計 | 高速チャンネル・スイッチング | ||
| 短所 | 周囲光やADPリーク電流によるダイナミック・レンジの減少 | 設計に関する複数の考慮事項 | 慎重な検討を必要とする複雑な回路 |
| 飽和回復が遅い |
ACカップリングとDCカップリングの比較
ACカップリングを選択した場合、ダイナミック・レンジを広げるには、飽和時の回復時間を犠牲にしなければなりません。ACカップリングが意味を持つのは、TIAの回復に数十マイクロ秒の時間がかかっても許容できるアプリケーションの場合です。DCカップリングを選択すれば回復時間ははるかに短くなりますが、DCの影響によってダイナミック・レンジの一部またはすべてが失われるという犠牲を伴います。DCカップリングが意味を持つのは、高速の回復が求められ、なおかつダイナミック・レンジを損なう可能性があるDCの影響を受けにくいアプリケーションの場合です。DCカップリングと電流除去機能を組み合わせたトポロジを選択した場合は、ダイナミック・レンジが広くなり、飽和回復とスイッチングも速くなりますが、設計がより複雑になります。このトポロジはオートモーティブ用LIDARの条件になっています。オートモーティブLIDARでは高速の回復とより広いダイナミック・レンジが必要とされ、これを実現するための設計の複雑化とコストの増大が許容されるからです。
パルス・アプリケーションのトランスインピーダンス・アンプ入力にACカップリング・コンデンサを単純に追加するだけでは、システムの性能を損なう可能性があります。しかし、必要に応じて現実的な目標を実現するために、トレードオフを行うことができます。すべてのシステムが最短の回復時間を必要とするわけではないので(例えば工業用システムや計測用システム)、そのような回路にはACカップリングを使用することができます。入力をACカップリングした場合でTIAだけが回復に関与するような場合は、すべてがTIAによって決まると考えて差支えありません。しかし、回復時間がゼロの理想的なTIAモデルを使用したとしても、ACコンデンサを追加すると、やはり回復時間は長くなります。このような場合はDCカップリングを追加したり、DCカップリングをしたうえでDC除去回路を追加したりすることを考えたほうが良いかもしれません。
まとめ
LIDARの入力は些細な問題ではなく、その設計プロセスには多くの変動要素が関わってきます。シグナル・チェーンは、どの設計を選択するかに応じて異なったものになるので、予めすべてオプションを検討したうえで自分のプロジェクトに最も適したものを選ぶことが重要です。
著者について
この記事に関して
産業向けソリューション
























