Driving Synchronized Precision Motion in Multiaxis Servo Control Systems
Driving Synchronized Precision Motion in Multiaxis Servo Control Systems
Apr 1 2015
Automated precision manufacturing has enabled the advancement and widespread availability of many of today’s high tech devices. Modern sleek cell phones rely on complex metal machining processes with fine surface finishing capability to produce the dies and molds needed to manufacture the mechanical components. The production of the tiny but powerful electronic components in the cell phone relies on automated IC wafer processing and precision wire bonding equipment. High precision and finish quality is also needed in larger equipment. Modern jet engines, for example, rely on finely balanced and precisely matched turbine blades to achieve high fuel efficiency and quiet operation. The gains in fuel efficiency of automobile engines are enabled by advanced electronic controls and complex shaped precision engine parts that optimize the combustion process.
Milling machines shape metal by moving a cutting tool spinning at high speeds along predefined paths to cut material off a solid block. Precision machining is a multistep process that includes a first rough cut followed by multiple finer cuts to achieve the desired finish. Multiple motors drive the tool spindle and the multiple lead screws needed to position the tool head. The power and stiffness (load rejection) of the motor position and speed servo drive sets the maximum cutting rates to support specific levels of surface finish precision. Thus, motor drive performance directly affects milling process efficiency by enabling a higher cut rate or a lower number of cuts. Production and energy efficiency is also maximized by selecting the optimal motion profiles for each operation and by minimizing the time to change cutting tools. Production quality is determined by the accuracy of the lead screws and by the motor drive shaft position and speed control. The latest milling machines have five or more axes of control to support the creation of complex shapes with the minimal number of work piece setup operations. Special purpose machining centers used in high volume production lines include even more servo drives to support multiple metal machining operations in parallel and robotic functions to fully automate the process. The challenge for the machine designer is to synchronize the operation and motion profiles of multiple servo drive axes to maximize machine throughput while maintaining product quality.
Precision Motion Control
The various elements that control automated machines used in modern factories are depicted in Figure 1. A central numerical controller (CNC) or programmable logic controller (PLC) manages the machine operation and generates motion profiles for each servo motor axis in the machine. Each servo drive includes multiple control loops to manage the mechanical system dynamics, electromagnetic torque production, and the electrical circuit dynamics. The performance of each of these control elements is critical to the machine throughput and finish quality. Computer aided manufacturing (CAM) tools generate motion profiles for the set of machining operations needed to create the finished product based on product drawings, material characteristics, and machine and tool capability. The automated machine then executes these profiles to manufacture the product.

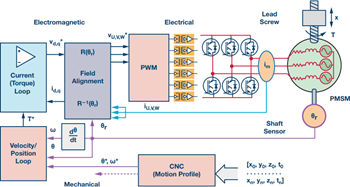
Figure 1. Automated machine control system.
The complete machine control function includes multiple cascaded control loops. The CNC transforms the machine spatial (x, y, and z) motion profiles into (θ or ω) motion profiles for each motor axis, accounting for the gearing provided by the lead screw that converts rotary to linear motion. Each motion profile is defined by sets of position or velocity in time. The timing synchronization between axes is critical since a timing error has the same effect as a position and velocity error on one of the axes.
The function of the servo drive velocity loop is to calculate the motor torque command (T*) needed to follow the target velocity profile. The precision and surface quality of the finished product is determined by the ability of the machine to guide the cutting tool exactly along the target path. The challenge in machining operations is that the metal cutting process is discontinuous since material peels off in chips, so the servo drive load varies rapidly. The velocity loop must be able to maintain a constant speed against load variations during cutting operations and respond rapidly to velocity commands during tool changing operations. The control quality at low speeds is highly dependent on the resolution of the position feedback, since a high sample rate differentiator is needed to generate a high dynamic velocity signal. Precision encoders used in machine tool drives use fast analog-to-digital converters to interpolate between encoder counts to provide much higher resolution. A 4096 line encoder, for example, provides 14 bits/rev of position resolution using a simple digital interface but this can be extended to at least 22 bits/rev using interpolation. The increase to 22 bits of position resolution supports 4 bits of velocity resolution at 1 RPM with a 4 kHz sample rate, compared to 4 bits of velocity resolution at 60 RPM with only a 1 kHz sample rate.
Efficient and high dynamic torque production in a permanent magnet ac servo motor requires sinusoidal stator currents aligned with the rotor magnet angular position, as shown in Figure 2. The current and field alignment control ensure the motor torque meets the dynamic requirements of the velocity loop. The PWM and inverter feedback isolation blocks are included in the electrical circuit control functions. The 3-phase power inverter applies the required voltage to the motor windings to drive the target winding currents. The current feedback function isolates winding current measurements from the high voltage inverter and provides feedback signals to the field alignment block. The precision of the current feedback defines the quality of torque production, since gain, offset, or nonlinearity errors in the feedback produces ripple torque that appears as a load disturbance to the velocity controller. In some precision servo drives, an additional loop also compensates for internal torque ripple in the servo motor created by interactions between the stator winding slots and the rotor magnets. All of this improves the motor’s low speed performance, which ultimately enhances the precision and surface quality of the finished product.


Figure 2. 2-phase permanent magnet ac motor field alignment.
Drive Architectures
As previously described, the drive systems performance is defined by multiple elements, such as the control architectures, motor design, power circuit, feedback sensors, and control processor. Control architectures have continued to evolve in the face of rising demands on drive performance, flexibility, and costs along with advances in both analog and digital electronic control components. Traditional analog circuit-based servo control has been replaced by digital control using embedded processors. Also, the speed command signal from the CNC, that was formerly a precision analog signal, is now transmitted as a data packet over a real-time (RT) industrial network. Thus, the modern servo drive system includes a communications interface along with the control and power circuits.
The ever present circuit design challenge in drive systems is to safely isolate the high voltage power circuits from user connected control and communication circuits. One common architecture that simplifies the inverter signal isolation challenge has a direct connection between the power circuit and control processor grounds, and an isolation barrier between the control processor and communications interface. The more common architectural choice for servo drive applications is to place the safety isolation barrier between the power stage and the control processor, which has a direct connection to the communication interface. A less common architecture is to split the safety isolation barrier between the power, control, and communications. This lowers the isolation standard requirements for each barrier and may reduce the overall size of the system.
An example using the isolated control architecture (in Figure 3) shows isolation of the inverter gate drive, voltage feedback, and motor current feedback signals from the control processor, but a direct connection to the position feedback sensors and the user, as well as communications interfaces. This architecture not only provides safety isolation for the control circuits, but also rejects the circuit noise generated by the high voltage switching power inverters. The motor current feedback is generated by winding shunts and isolated Σ-Δ modulators that provide gain matching, very low offset, and very high linearity. The programmable sinc3 filters on the control processor that completes the current feedback signal path also include output short-circuit detection functions. Analog signal isolators provide inverter bus voltage isolation and this signal is captured by the embedded sampling ADC. The quadrature encoder peripheral (QEP) on the control processor supports simple digital encoder interfaces, but higher resolution encoders with interpolation circuits typically use high speed serial interfaces to transmit position and velocity information on demand.


Figure 3. Dual-axis motor control system with an isolated control architecture using the ADSP-CM408 mixed-signal ASP and the AD7403 isolated modulator.
The real-time (RT) Ethernet interface in the previous example is provided by an FPGA circuit to provide the flexibility needed to support the multiple industrial networking protocols in the automation market place. The FPGA manages the real-time data packets from the network, while the control processor has the bandwidth and memory to support stack management. Many of these protocols support isochronous real-time control with jitter specifications under 1 μs, which places a very heavy processing burden on the communications interface. This demand on servo drive synchronization, as described previously, is as important as servo drive performance when it comes to delivering high productivity and finished quality in modern automated machining systems. An emerging trend in automation systems is to control two or three servo motors using a single processor and rely on a single real-time communications interface. This is now supported by the availability of high speed application specific signal processors (ASSP), such as the ADSP-CM408, which includes a high speed floating-point core and multiple sets of motor control and communication peripherals.
This wide variety of architectures seen across industrial motor drive applications highlights the fact that many important motor drive system design challenges remain. The automation industry demand for higher precision and dynamic response is increasing along with the availability of control processing and sensor feedback signal bandwidth. New materials, sensors, controls, and communications circuit architectures and even more algorithms and software are likely to continue to feed the demand for higher productivity and better quality from automated production.
About the Authors
Aengus Murray is the motor and power control applications manager for the automation, energy, and sensors unit at Analog Devices. He is responsible for the complete ADI signal chain offering for industrial motor and power ...
Related to this Article
Products
RECOMMENDED FOR NEW DESIGNS
16-Bit, Isolated Sigma-Delta Modulator
PRODUCTION
240MHz ARM Cortex-M4 with 13+ ENOB ADC, LQFP176
Industry Solutions
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}
Latest Media 21