
概览
设计资源
器件驱动器
软件(如C代码和/或FPGA代码等)用于与元件的数字接口通信。
ADXL345 Input 3-Axis Digital Accelerometer GitHub Linux Driver Source Code (SPI)
ADXL345 - No-OS Driver for Renesas Microcontroller Platforms
优势和特点
- 最高16g的可编程加速度计
- 数字输出可轻松连接至传感器
- 内置FIFO减少了处理器的工作量
参考资料
-
CN-01332010/11/18PDF310 kB
电路功能与优势
ADXL345是一款小巧纤薄的低功耗三轴加速度计,可以对高达±16 g的加速度进行高分辨率(13位)测量。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或者I2C 数字接口访问。
ADXL345非常适合移动设备应用。它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。它具有高分辨率(4 mg/LSB),能够测量约0.25°的倾角变化。使用ADXL345等数字输出加速度计时,无需进行模数转换,从而可以节省系统成本和电路板面积。此外,ADXL345内置多种功能。活动/非活动检测、单击/双击检测以及自由落体检测均在内部完成,无需主机处理器执行任何计算。内置32级FIFO存储缓冲器可以减轻主机处理器的负担,起到简化算法和省电的作用。利用内置的活动/非活动检测功能,将ADXL345用作“运动开关”(无活动时关闭整个系统,检测到活动时才开启),系统可以实现进一步省电。
ADXL345通过I2或SPI接口进行通信。本文所述电路演示如何通过这些协议实现通信。




电路描述
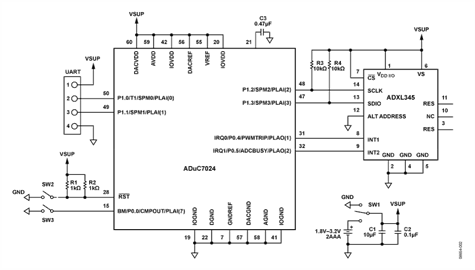
本电路将精密模拟微控制器ADuC7024和数字加速度计ADXL345配合使用。两款器件均支持I2C和SPI接口。图1显示ADXL345和ADuC7024的SPI配置,图2显示这些器件的I2C配置。CS引脚(ADXL345的引脚7)用来选择所需的接口。如果CS引脚连接高电平(VDD I/O),则I2C 模式使能。在SPI模式下,每次传输开始和结束时,CS电平均会切换。如果CS被拉高,则表示没有SPI传输发生,或者I2C 传输可能发生。
所示原理图均为示意图,但显示了必需的连接(电源、接地等)。在这些原理图中,ADuC7024通过UART进行编程(连接到引脚49和引脚50)。SW2和SW3分别是复位和下载按钮,用于微控制器编程。SW1是电源开关。
欲了解有关ADuC7024编程的信息,请参考 ADuC7024 数据手册。关于I2C配置的示例代码,请访问:https://www.analog.com/static/imported-files/circuit_notes/CN0133_Source_Code.zip.
常见变化
图1显示了ADXL345的4线式SPI配置,但它也能通过3线式SPI进行通信。图3显示了这种配置。


上述电路采用ADuC7024微控制器。同样的配置可以适用于任何支持SPI或I2C的微控制器,如图4所示,其中采用标准I2C和SPI连接。表1列出了两种协议的引脚功能。
| ADXL345引脚编号 | 引脚名称 |
功能 | |
| I2C | SPI |
||
| 7 |
CS |
(连接到VDD以支持I2C) | 片选 |
| 12 |
SDO/ALT ADDRESS |
备选地址选择 |
串行数据输出 |
| 13 |
SDA/SDI/SDIO |
串行数据 |
串行数据输入(4线式SPI)/ 串行数据输入和输出(2线式SPI) |
| 14 |
SCL/SCLK |
串行通信时钟 |
串行通信时钟 |

