AN-1123:控制器局域网(CAN)实施指南
简介
控制器局域网(CAN)是内置故障处理功能的分布式通信的 标准,针对ISO-11898开放系统互连(OSI)模型的物理和数 据链路层加以规定1, 2。由于采用的通信机制非常可靠,因此 CAN已广泛用于工业和仪器仪表应用以及汽车行业。
CAN有如下特性:
- 一条总线支持多个主机
- 固有的消息优先级
- 总线通过消息优先级进行仲裁
- 多层错误检测和恢复
- 采用不同时钟源的节点间的数据时序同步
在物理层,CAN协议支持差分数据传输,其优势包括:
- 在一对绞线电缆上进行双向通信
- 抗扰度更高
- 宽共模范围允许节点之间存在地电位差异
实施控制器局域网
本应用笔记考虑在工业应用中实施CAN的下列方面:
- CAN实现层:CAN规范和协议与硬件/软件和CAN收发 器产品有何关系
- CAN消息:消息结构对错误校验/恢复和仲裁有何重要 意义
- 仲裁:CAN规定的载波侦听多路访问方法如何支持多个 驱动节点
- 错误机制:CAN规范本身如何增强通信鲁棒性
- 物理总线:哪些措施确保物理层正常通信
- 隔离:CAN的信号和电源隔离以及CAN的集成隔离解 决方案
- 应力保护:CAN中用来保护收发器免受电气过应力影响 的机制
CAN如何使用差分数据传输
在传统的差分数据传输(例如 RS-4853)中,逻辑1按如下方式 传输:同相传输线为高电平,反相传输线为低电平。相应 地,逻辑0的传输方式是:同相线为低电平,反相线为高 电平。接收器利用两条线之间的电压差判断传输的是逻辑 1还是逻辑0,如表1所示。
| 逻辑 | RS-485电平 | CAN状态 | CAN电平 |
| 1 | A − B ≥ +200 mV | 被动 | CANH − CANL ≤ 0.5 V |
| 0 | A − B ≤ −200 mV | 主动 | CANH − CANL ≥ 0.9 V |
总线上的驱动器也可以处于第三态,驱动器输出处于高阻态。如果所有节点都处于这种状况,则总线处于空闲状态。这种情况下,两条总线一般具有相似的电压,压差很小。
CAN信号传输的区别在于仅有两个总线电压状态:被动(驱动器输出为高阻态)和主动(总线CANH为高电平,另一条总线CANL为低电平),阈值如表1所示。传输节点传输逻辑0主动状态和逻辑1被动状态。空闲CAN总线与被动位传输的区别在于:帧结束或错误帧后会检测到多个被动位。
图1比较了CAN信号传输与RS-485,主动和被动这两个状态分别由CANH和CANL电平表示。对于节点仲裁和较低ID(以串行方式传输消息时,初始逻辑0较多)的消息的固有优先级,这种信号传输方法至关重要。

图1. CAN与RS-485/RS-422的差分信号传输比较
CAN实现层
CAN通信标准ISO-11898由国际标准组织(ISO)制定,可以在七层OSI通信模型环境内加以考虑。ISO-11898-1涉及数据链路层及其对周围层的影响。ISO-11898-2涉及数据链路层的一部分和物理层。
CAN的实现取决于下列方面:
- 物理层收发器通过双绞线电缆等物理介质实现CAN消息 与差分信号的相互转换。
- 实现数据链路层的CAN控制器(有时嵌入在微处理器 中,例如ADI公司的 Blackfin® ADSP-BF548))。这些应遵守CAN 2.0b规范4,以确保通信符合ISO 11898标准。
- 实现应用层协议的CAN软件应用程序(软件应用程序数据与CAN消息的相互转换)。
图2给出了实现CAN应用的各种模块,并显示了它们与OSI 层的关系以及各模块实现的功能。
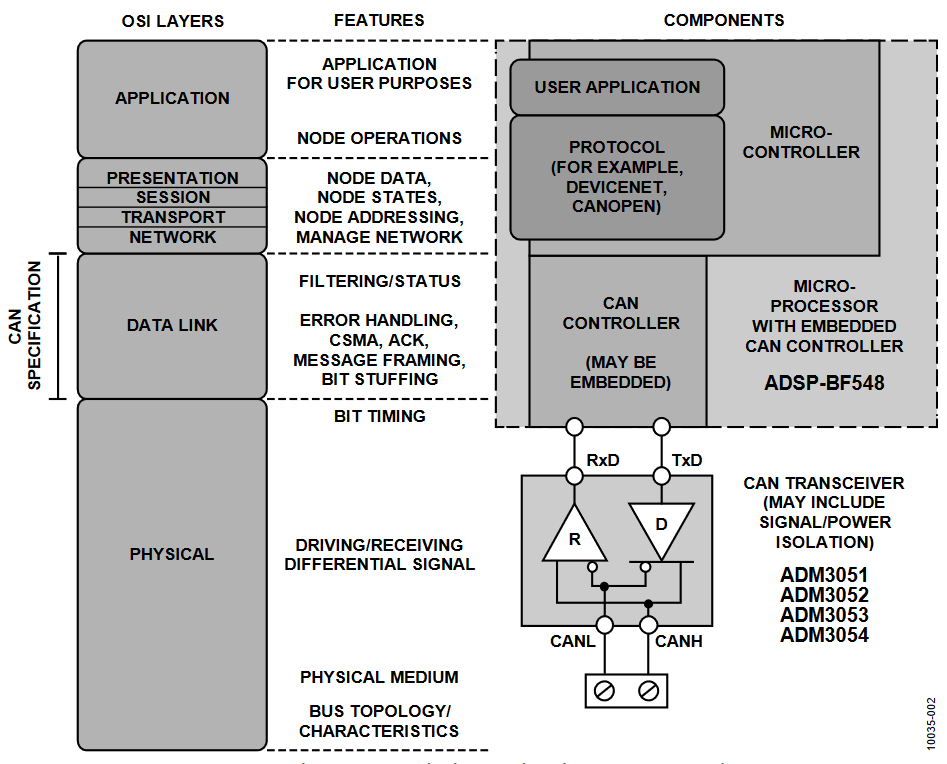
图2. CAN实现模块、与OSI层的关系及功能
物理层收发器
CAN收发器提供数据链路层、CAN控制器(例如内嵌在ADI公司的某些Black n处理器中)与CAN总线的物理线路之间的差分物理层接口。 ADI公司的产品组合包括集成iCoupler®数字隔离5(用于信号隔离)和 iCoupler® 电源隔离5的收发器,从而提供完全隔离的现成CAN PHY。
ADM3051/ADM3052/ADM3053/ADM3054 设计用于与CAN 控制器接口,支持各种CAN应用。根据应用不同,可以将其它高级协议与CAN结合使用,如CANopen或DeviceNet™等。
- ADM3054是一款5 kV rms信号隔离高速CAN收发器。
- ADM3053是一款集成2.5 kV rms信号和电源隔离的全隔 离式高速CAN收发器。
- ADM3052是一款5 kV rms信号隔离高速CAN收发器,集 成一个总线电压调节器,可使用24 V总线电源(例如在 DeviceNet应用中)。
- ADM3051是一款非隔离式高速CAN收发器。
CAN控制器
CAN数据链路层和物理位时序由CAN控制器(有时内嵌在微控制器或DSP中,如ADSP-BF548),依据CAN 2.0b规范和ISO-11898标准的数据链路层部分实现。CAN控制器处理消息过滤、仲裁、消息帧、错误处理,以及位填充等错误检测机制。
DeviceNet网络
DeviceNet6规范由通信网络开放DeviceNet供应商协会 (OVDA)管理。DeviceNet规定了物理层的各方面内容、物理和数据链路层的CAN使用,以及利用通用工业协议(CIP)进行的更高级通信。工业和仪器仪表行业普遍利用 DeviceNet来实现CAN应用。
DeviceNet规定了一种多分支网络,它支持线性总线拓扑结构上的主从或分布式控制方案。网络不仅包括差分信号传输总线,而且包含电源和地,因此节点可以从总线获得电源。
DeviceNet物理层规范规定了一些功能,例如:CAN技术的使用、接线错误的防范,以及在工作时添加或删除网络节点的能力。它详细规定了物理层的各个方面,包括传输介质和连接器。
ADM3052隔离式CAN收发器满足DeviceNet的物理层要求,并且集成了DeviceNet节点所用的功能,例如:信号隔离、接线错误保护以及一个从24 V总线电源(V+)为器件总线侧供电的线性调节器。图3提供了ADM3052的功能框图及应用配置。
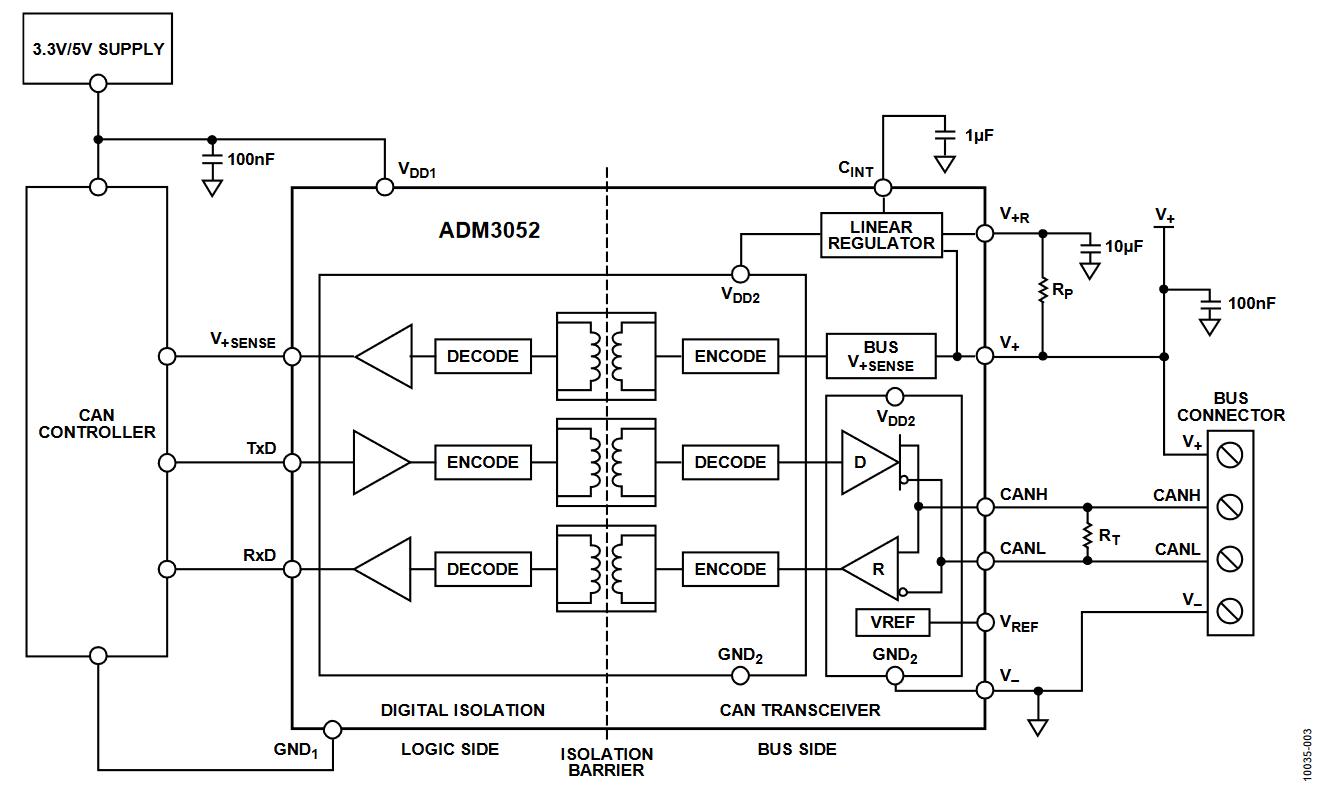
图3. 采用ADM3052隔离CAN收发器的应用示例
CANopen协议
CANopen7是一种应用层协议,由CAN in Automation (CiA) 维护,使用CAN数据链路和物理层,并且规定了器件、通信和应用的标准配置。它支持在不同应用领域之间实现互通,如工业自动化、楼宇控制和通用I/O等。物理层符合 ISO-11898,采用总线拓扑结构,数据速率最高可达1 Mb。
ADM3052可用来完全隔离网络(如使用CANopen的网络)上的通信,收发器总线侧的电源由集成的隔离式DC/DC转换器提供。图12所示为ADM3052的功能框图。
如果应用电路中已经存在5 V隔离电源,那么也可以使用ADM3052,它是一款集成5 kV rms数字隔离器的CAN收发器。
CAN消息帧结构
CAN消息的结构对于实现鲁棒的通信至关重要,具体机制包括错误检测、消息的固有优先级和基于逐位仲裁的多驱动器能力。CAN控制器按照CAN 2.0b规范(包括本文详细说明的扩展消息类型)的要求,处理CAN消息的帧传输。
如“简介”部分所述,CAN消息在物理层的信号传输如下:总线处于高阻抗被动状态时传输1,总线处于差分高/低主动状态时传输0。图4和图5显示了CAN消息帧的组成,白色位域表示被动总线状态,深灰色位域表示主动状态,灰色位域可以是主动状态,也可以是被动状态。
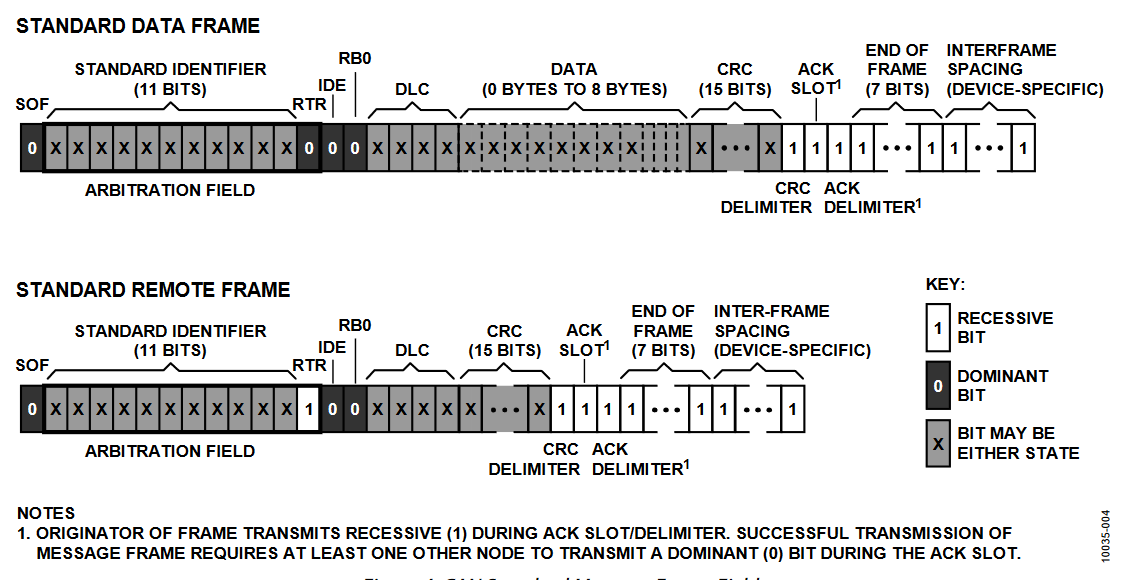
图4. CAN标准消息帧的各个域
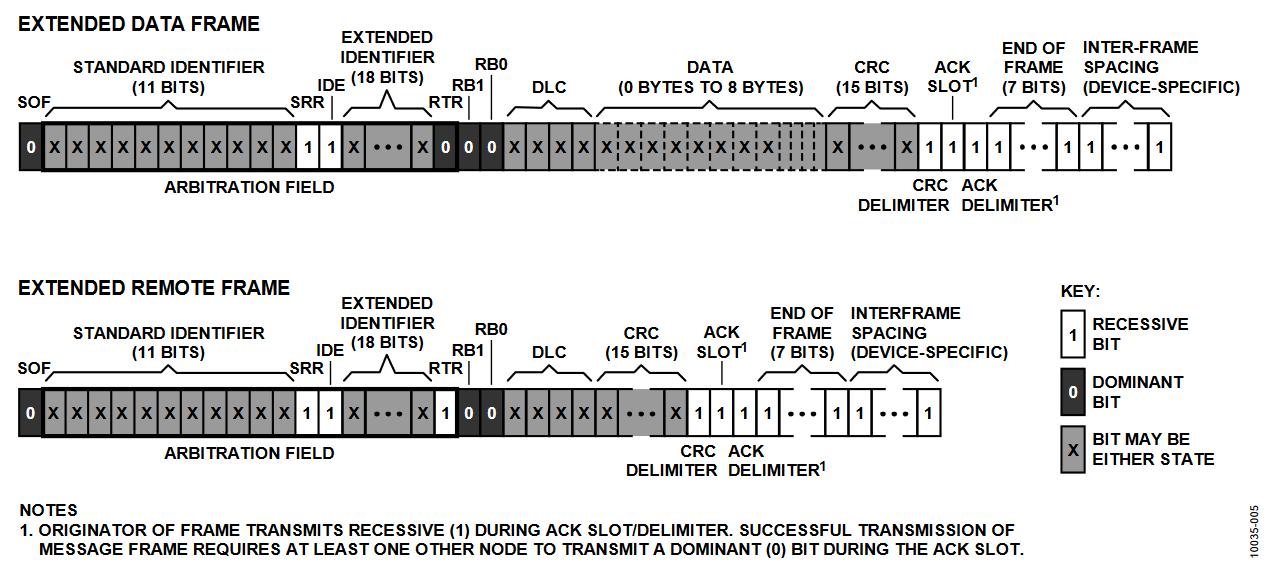
图5. CAN扩展消息帧的各个域
仲裁域
如图4和图5所示,消息标识符是CAN消息帧的一部分。该部分与若干标志位一起被称为仲裁域(如图4和图5所示),其中消息ID和标志位表示消息类型并决定仲裁,因而也决定了消息优先级。有两个主要属性可以使用标志位区分CAN消息类型:
- IDE位,表示使用扩展标识符
- RTR位,表示远程传输请求
远程传输请求用于请求发起者发送某一消息(总线上的节点一般自主发送数据)。该远程传输请求是一条无任何数据的消息,由一个节点发送,请求其它节点传输相同ID但带数据的消息。
SRR位表示替代远程请求,用于带扩展ID的消息,以便兼容仅使用标准CAN消息的节点。
还有一些保留位用于CAN协议的未来扩充,这些位必须为0以确保与未来兼容。
数据长度代码(DLC)域
一个CAN消息帧中最多可以存在8个数据字节。帧中的数据长度编码在DLC域中。远程传输请求提供所请求数据帧的数据长度。注意,DLC域的有效值仅为0到8。
循环冗余校验(CRC)域
CRC域是CAN协议中错误校验机制的一部分。CRC域包含一个根据CAN帧内容生成的序列,它是一个多项式除法运算的余数。接收到的序列和数据可以用于另一个多项式除法运算,确保没有任何位是以反转/错误状态被意外接收。
CRC域由随后的ACK间隙定界(总线保持一个位间隔的被动状态),以确保CRC域不受ACK行为的影响。
应答(ACK)间隙
虽然ACK间隙是由消息发起者作为逻辑1(总线被动状态)传输的,但在该位间隔中,只有总线被另一个节点设为主动状态,才能实现无错传输。任何无错接收到先前消息域的其它节点都会自动尝试传输逻辑0,以确认收到消息。
ACK定界符(总线保持一个位间隔的被动状态)用于在消息的其余部分之前留出一个空格,这样即使传输ACK位的节点具有稍微不同的时序,而导致主动位溢出到下一个位周期(即定界符间隔),也不会出现问题。
如果总线在ACK间隙内一直处于被动状态,检测到这一状况的节点将会在下一位周期中传输一个错误帧。
帧结束
帧结束由一个7位间隔的总线被动状态表示,由于位填充(运行长度限制编码,在消息中的每6个连续1或0后插入一个互补位),该序列不会在消息的其余部分中出现。帧结束后,还会观察到一个总线处于被动状态的帧间空白(其确切长度取决于给定CAN控制器规定的总线空闲时长)。
仲裁
在一条CAN总线上,任何节点都可以传输数据。节点仲裁总线的使用,如有两个或更多节点试图传输,则依据其优先级依次传输消息。
由于主动位的传输会覆盖被动总线状态,因此可以实现无损且透明的仲裁。各节点的CAN控制器监控总线,如有另一个节点赢得仲裁,CAN控制器会检测到这一情况。无损和透明意味着消息未受损坏,依据仲裁规则,最高优先级的消息不中断地传输。
如果总线活动(一个节点正在传输或刚刚完成传输),则其它节点不会尝试传输。如果总线空闲(时长至少为帧间空白的长度),而且有一个以上的节点开始传输,则将发生透明且无损的仲裁。无损仲裁意味着赢得仲裁的节点可以继续传输其消息,不受其它节点的干扰。
以图6所示为例,两个节点同时尝试传输。传输时,两个CAN节点均监控总线状态;当节点2尝试传输SID7时,它可以检测到另一个节点(本例中为节点1)已写入一个主动值到总线,因而赢得了仲裁。只有等到总线空闲一定时间(帧间空白)后,节点2才尝试重新传输。节点1继续传输,同时也会监控总线以检测错误,或者检测在随后的仲裁域位间隔中是否有另一个节点赢得仲裁。

图6. CAN节点之间的仲裁示例
注意,在节点1传输完5个初始主动位后出现了位填充。这些额外的位对于节点时序的同步非常重要,同时也用于错误检测。
消息优先级
CAN消息帧以MSB(最高有效位)优先方式传输,消息ID位于帧的开头,因此构成仲裁序列的一部分。消息的ID越低(初始0越多),则优先级越高。此外,远程帧(RTR位 = 1)的优先级低于相同ID的数据帧。
错误机制
CAN整合多种机制来支持错误校验和处理,其中包括下列 错误检测方案的定义:
- 传输位验证
- 位填充规则
- CRC校验
- 固定形式位域校验
- 强制消息ACK
这些错误通过下列机制进行处理:
- 错误帧
- 错误计数器
- 节点错误状态
CAN控制器检测并处理这些错误,支持通过传输符合CAN 2.0b的CAN消息帧来检测错误。
错误帧
错误帧的特征是具有6个连续位。根据传输错误的节点状态不同,该序列可以是主动状态,也可以是被动状态。该序列违反了正常传输规则,因此可以被其它节点检测到。
任何节点,只要检测到错误,就会立即传输错误帧。当错 误帧本身突出一个错误时,其它节点会同时传输自己的错 误帧,导致多个错误帧叠置。
由6个连续位组成的序列是错误标志。错误帧同样含有一个错误定界符,这样即使来自其它节点的错误标志溢出初始的6个位周期也不会有问题。

图7. 带ACK的正常传输与带CAN错误帧的故障传输
为了与无错传输进行比较,图7显示了一个有错CAN帧传输及随后的CAN主动错误帧的例子。
任何传输错误标志的节点随后都会发送被动位,直至检测到总线处于被动状态,此后将再传输7个被动位。之后,节点就可以尝试传输正常的CAN帧。
错误计数器
每个CAN节点都必须实施两个错误计数器:一个发送错误计数器和一个接收错误计数器。这些计数器根据发送或接收错误数递增,并且根据成功发送或接收的消息数递减。
节点错误状态
根据错误计数器,节点可能处于下列三种状态之一:
- 错误主动
- 错误被动
- 总线关闭
在错误主动状态下,节点应该能在总线上通信;当检测到错误时,节点应当会发送主动错误标志。要使节点保持错误主动状态,发送和接收错误计数器必须小于127。
在错误被动状态下,节点可以在总线上通信,但在发生错误时仅会发送被动错误标志。当发送或接收错误计数器达到或超过127时,节点即会进入此状态。一旦这些计数器再次递减到127或以下,节点就会变为错误主动状态。
在总线关闭状态下,不允许节点在总线上通信。当发送错误计数器达到或超过256时,就会出现这种状态。128次检测到11个连续被动位后,节点可以将其错误计数器复位到0,以便进入错误主动状态。
传输位验证
传输时,传输节点会监控总线,确认总线上出现的每个位都是正确的。如果在总线上检测到相反的位电平,则称之为“位错误”,这是传输错误的一种形式。但是,并非一检测到相反位电平就说明出错,有两个例外情况:
- 仲裁域以被动状态传输,但由于其它节点会应答该消息,总线状态理应变为主动状态。
- 如果发送被动错误标志的节点检测到总线处于主动状态,则表示并不是位错误。
位填充规则
位填充是指这样一个过程:传输5个连续的同值消息位后,传输节点在传输的位流中插入一个互补位。这种编码方法适用于整个CAN数据或远程帧,但CRC定界符、ACK域和帧结束的固定形式位域除外。CAN错误或过载帧也是固定形式。
任何节点,如果接收到违反位填充规则(应进行位填充的一个序列中有5个以上的连续被动或主动位)的消息,就会将其视为接收错误,并根据节点状态采取措施(例如发送一个主动或被动错误帧)。
CRC校验
CRC是基于CAN帧的第一部分(截止数据域)计算出来的位序列。发送节点将一个发生器多项式分解为一个由CAN数据构成的多项式,余数即为CRC序列。此CRC序列会被插入CAN消息的CRC域。
接收节点将发生器多项式分解为一个由数据和CRC序列共同构成的多项式。如果没有错误,则余数应为0。
这一过程称为CRC校验。如果接收到的消息出错(即有反转位),则CRC校验失败。
固定形式位域校验
CAN消息中的某些位域是固定形式的,具体来说是CRC定界符域、ACK域和帧结束。接收节点通过执行形式检查来确保这些位域正确无误。
消息应答
虽然仲裁域是以被动位传输,但在该位时间内,发送节点会检查总线上有无主动位。此主动位是正确接收到消息的节点发送的ACK位。如果没有节点应答消息,则发生传输错误。图7显示了接收节点在CAN消息中插入ACK位的例子,图中显示了一个较低的差分信号;当发送节点位于探测点,接收节点位于总线的另一端时,可以观察到这种情况。
物理总线
CAN物理总线特性
ISO-11898-2规定了CAN的物理层特性。该标准要求使用由标称阻抗为120 Ω(最小值95 Ω和最大值140 Ω)的并行导线组成的电缆。虽然ISO-11898-2允许使用无屏蔽电缆,但出于电磁兼容性(EMC)考虑,一般需要使用屏蔽双绞线电缆。
当数据速率为1 Mb时,CAN支持最长40米的线路。如果数据速率较低,可以使用更长的线路。ISO-11898-2规定了一种线路拓扑结构,各节点利用短分支线连接到线路。此分支线应尽可能短;当数据速率为1 Mb时,其长度应不大于0.3米。
端接
一条传输线路中存在两条电路路径,一条将电流从驱动器载至接收器,另一条提供回到驱动器的返回路径。CAN链路稍微复杂一些,有两条信号线共享一个端接和一条接地回路。但是,传输线路的基本原理是相同的。要实现可靠的CAN通信,必须尽可能减少传输线路中的反射,这就必须进行适当的电缆端接。图8显示了CAN应用的两种端接方案。

图8. CAN应用的端接方案
信号转换期间和转换之后会立即发生反射。在较长的线路上,反射更有可能持续很长的时间,足以引起接收器误读逻辑电平。在较短的线路上,反射持续时间短得多,因此对接收的逻辑电平没有影响。
并联端接
在CAN应用中,总线的两端均必须端接,因为总线上的任何节点都可能传输数据。链路的每一端都有一个端接电阻,阻值等于电缆的特征阻抗,不过端接电阻的推荐标称阻抗值为120 Ω(最小值100 Ω和最大值130 Ω)。无论网络中连接了多少节点,都不应存在两个以上的端接电阻,因为额外的端接电阻会给驱动器增添额外的负载。
ISO-11898-2建议不要将端接电阻集成在节点中,而应在总线的最远端连接独立的端接电阻。这样,即使含端接电阻的节点断开,端接电阻也不会丢失。此外,这样还可以避免将两个以上的端接电阻连接到总线,或者将端接电阻放在总线两端之外的位置。
带共模滤波的并联端接
为了进一步提高信号质量,可以将各端的端接电阻一分为 二,并在这两个电阻之间放置一个滤波器电容 CT,从而滤 除总线中的高频干扰噪声,并降低共模辐射。
隔离
CAN应用中常常使用较长链路,这会引起总线上不同节点的地电位略有不同,从而导致地电流通过公共接地或地线流过最低电阻路径。如果使用相同的电气系统将所有节点的电源连接到同一接地,接地连接的噪声可能会降低。但是,请注意,电机、开关及其他电噪声设备仍可能在系统内引起接地噪声。
某些应用需要不同的电源系统,这有可能提高接地阻抗,使得其它来源的地电流更很可能进入链路的地线。将链路隔离起来可减少甚至消除这些问题。如果无法保证系统中不同节点的地电位均位于收发器的共模范围内,则推荐使用电流隔离方案。电流隔离不阻止信息流,但阻止电流(见图9)。
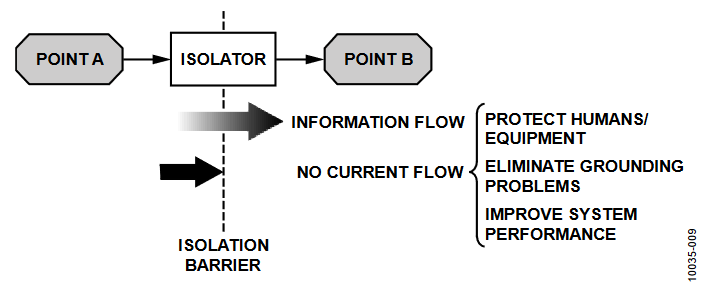
图9. 电流隔离不阻止信息流,但阻止地电流
集成式信号和电源隔离CAN收发器
ADI公司针对各种不同的应用提供CAN收发器,包括:
- ADM3054:集成5 kV rms信号隔离,适合已有5 V隔离电源的系统
- ADM3053:集成信号和电源隔离,适合需要完全隔离的CAN应用
- ADM3052:集成信号隔离和电压调节器,适合采用24 V总线电源的隔离应用(如DeviceNet)
- ADM3051:适合非隔离应用或采用传统隔离方法的应用
实施电流隔离时,需要通过某种办法向应用电路的总线侧提供电源。在DeviceNet应用中,CAN总线上的所有节点都使用24 V电源,如利用ADM3052的示例所示。图10显示了利用ADM3052实现的高集成度。该器件只需极少的外部元 件,其内部集成了ADI公司iCoupler技术实现的信号隔离,此外还集成了一个调节器,可以从24 V总线电源向器件总线侧提供5 V电源。ADM3052实现了5 kV rms的隔离性能。
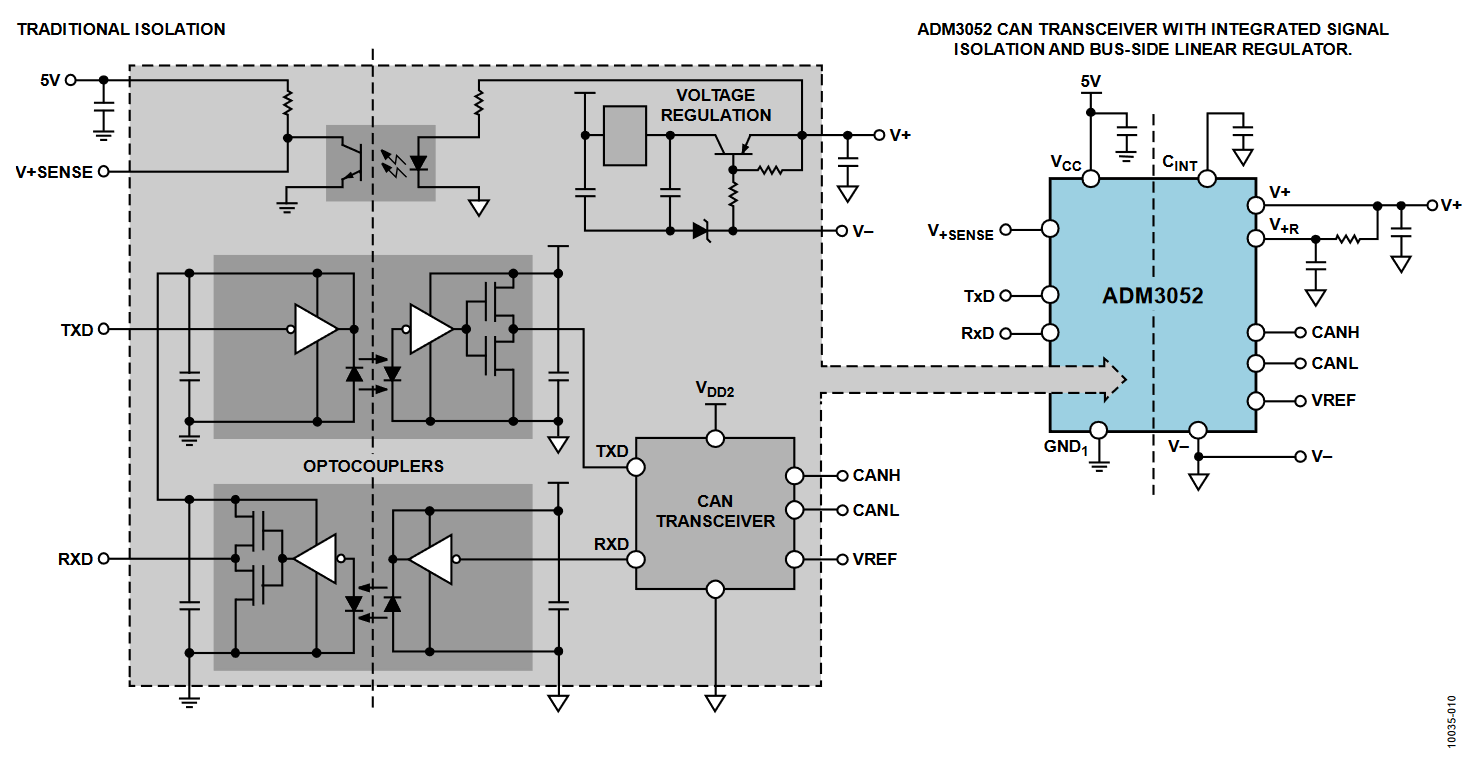
图10. 采用总线电源的传统隔离与ADM3052的比较
对于以分立方式提供隔离电源的应用,或者将总线电源用于各种电路元件的应用,ADM3054可以配合器件总线侧的5 V隔离电源使用。
在其它应用中,可以将电路逻辑侧的电源传输到隔离栅的另一侧。传统上,这需要利用由振荡器、变压器和调节器等分立元件组成的DC/DC转换器来实现。
ADM3053同时集成了电源隔离和信号隔离。利用ADI公司的isoPower技术,5 V单电源可以通过一个集成的隔离式DC/DC转换器向总线侧供电。ADM3053实现了2.5 kV rms的隔离性能。图11比较了采用分立器件的传统解决方案与ADM3053。ADM3053的内部模块如图12的功能框图所示。

图11. 传统隔离(信号和电源)与ADM3053的比较
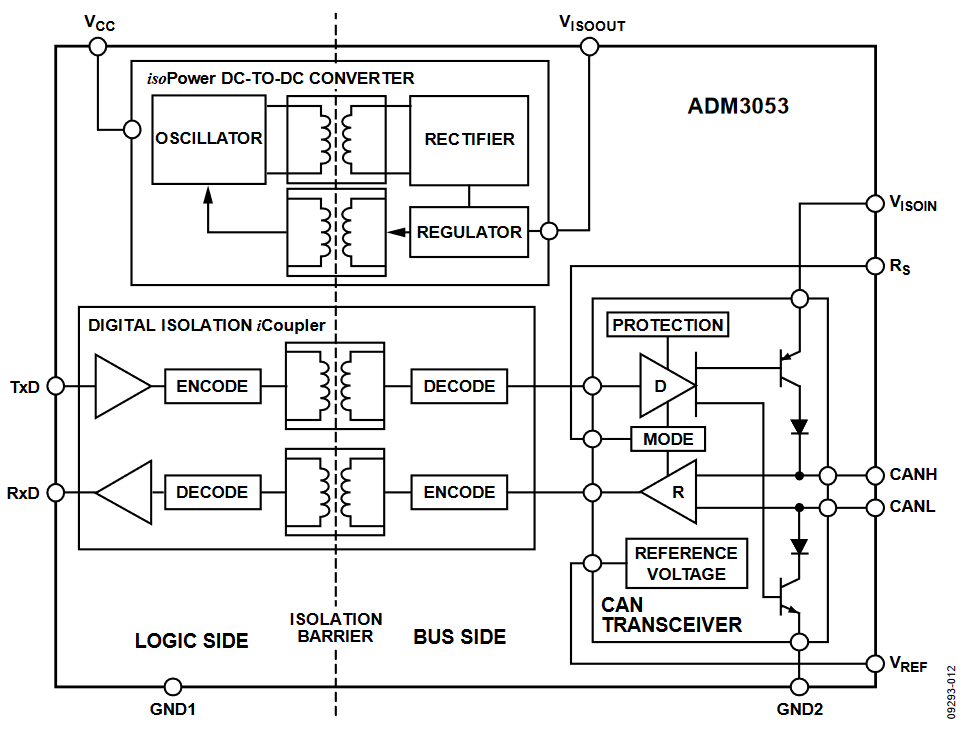
图12. ADM3053功能框图
应力保护
接线错误和短路
某些CAN应用,如DeviceNet等,除了在总线CANH和CANL上载送数据外,还沿着总线分配电源。这种系统通常沿着总线提供24 V的总线电源和公共地。
此类系统中,各CAN节点的连接器有四条线:CANH、CANL、24 V和地。为防止信号接线错误造成损害,使用24 V总线电源的CAN节点需要在所有四条线(CANH、CANL、电源和地)上提供保护。接线错误保护是DeviceNet协议的一项要求。集成总线电源调节器的ADM3052隔离CAN收发器能在CANH、CANL、V+和V-引脚上提供±36 V的接线错误保护。
其它不使用总线电源的CAN节点可能也需要这种保护。这 种情况下,CAN节点仍然需要防止CANH或CANL连接到 电源或地线而造成短路。为此,ADM3051、ADM3053和 ADM3054 CAN收发器还在CANH和CANL上集成了±36 V保 护。
瞬态过压
在工业和仪器仪表应用中,雷击、电源波动、感应开关和静电放电会通过产生较大瞬变电压对CAN收发器造成损害。以下ESD保护、EFT保护和电涌保护技术规范适用于工业应用:
- IEC 61000-4-2 ESD保护
- IEC 61000-4-4 EFT保护
- IEC 61000-4-5电涌保护
ADI公司CAN收发器ADM3051、ADM3052和ADM3053的所有引脚上都提供基本ESD保护。如果使用外部箝位器件(如TVS二极管),总线引脚的保护程度可进一步提升。TVS二极管通常用于保护CAN收发器等硅器件免受瞬变损坏。
具体方法是通过PN结的低阻抗雪崩击穿将电压尖峰箝位至一个限值。TVS二极管属于理想断路器件。TVS二极管在低于击穿电压的状态下工作时,若与特定电容并联,可模拟为一个较大电阻。发生瞬变并且浪涌电压大于TVS的击穿电压时,TVS的电阻降低,以保持箝位电压恒定。所选TVS二极管的箝位电压应低于它要保护的器件的电压额定值。瞬变立即受到箝位(< 1 ns),受保护器件得以避开破坏性电流(参见图13)。

图13. 瞬变电压抑制器
TVS在CAN应用中的作用是箝位超出最大额定值的总线电压,从而保护CAN收发器。一些TVS器件专为CAN应用而设计。图14显示了一个利用双向齐纳二极管在CAN总线上实现TVS的示例电路。
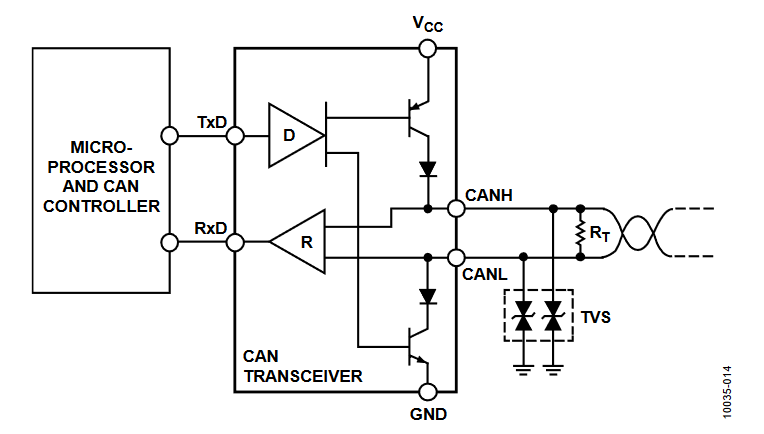
图14. TVS应用电路
参考电路
1 ISO 11898-1:2003, “Road Vehicles — Controller Area Network (CAN — Part 1: Data Link Layer and Physical Signalling,” (ISO International Standard, 2003).
2 ISO 11898-2:2003, “Road Vehicles — Controller Area Network (CAN) — Part 2: High Speed Medium Access Unit,” (ISO International Standard, 2003).
3 Hein Marais, Application Note AN-960, “S-485/RS-422 Circuit Implementation Guide,” (Analog Devices, Inc., 2008).
4 CAN Specification 2.0, Part B, (CAN in Automation, 1991).
5 Boaxing Chen, “iCoupler® Products with isoPower™ Technology: Signal and Power Transfer Across Isolation Barrier Using Micro-Transformers,” Technical Article, (Analog Devices, Inc., 2006).
6 DeviceNet™ Technical Overview, (Open DeviceNet™ Vendor Association, Inc., 2001), X to XI.
7 EN 50325-4:2002, “Industrial Communication Subsystem Based on ISO 11898 (CAN) for Controller-Device Interfaces, CANopen,” (CAN in Automation, 2002).
作者
