大型のパッシブ・コンポーネントと置き換えてMIL-STD-1275Dへの適合を容易にする高電圧サージ・ストッパ
防衛用車両の電子機器は独得な課題を有しており、中でも大きな課題は不良電源による動作です。現場で電源に発生する困難な変動を認識した米国国防総省は、防衛用車両の28V電源で駆動する電気システムの要件を規定するMIL-STD-1275Dを作成しました。MIL-STD-1275Dのサージおよび関連する過渡に耐えるシステムを設計するには、伝統的に、大型で高価なパッシブ・コンポーネントが必要です。リニアテクノロジー社のサージ・ストッパ製品ラインは、この種のサージからシステムを保護するのに適している一方、コストとソリューション規模を低減します。
MIL-STD-1275Dの要件
MIL-STD-1275D は各種の条件を規定しており、特に重要なものとして、定常状態の動作、始動時の外乱、スパイク、サージ、およびリップルの条件があります。MIL-STD-1275D は、3つの「動作モード」、すなわち始動モード、通常動作モード、およびジェネレータのみモードにおけるこれらの各条件について、要件を規定しています。
スパイク、サージ、リップル、その他の要件の詳細を説明する前に、まず動作モードについて説明します。文字どおり、「始動モード」はエンジンの始動時に発生する条件を表します。「通常モード」はシステムがフォルトなしで動作するときの条件を表します。そして、「ジェネレータのみモード」は、バッテリが接続されておらずジェネレータが直接電子機器を駆動する、特に過酷な状況を表します。
ジェネレータのみモードは、厄介な状況です。通常、バッテリは、ジェネレータの電力が変動するにもかかわらず比較的一定の電圧を維持することにより、ジェネレータの不安定な特性を隠しています。予想されるとおり、ジェネレータのみモードに規定された制限値は、通常動作モードよりも悪いものです。大体において、ジェネレータのみモードの条件で動作するシステムは、通常モードでの動作では何の困難もありません(考えられる例外の1 つは、ジェネレータのみモードでサージ時の500mΩ のソース・インピーダンスは、通常動作モードの20mΩ のソース・インピーダンスと比較して、負担を軽減できることです)。
定常状態
他の規格と同様に、MIL-STD-1275D は条件と要件を詳細に規定しています。この記事は、これらの要件と提案するソリューションをより分かりやすい形式で提示することを目的にしています。より正確な規定と要件については、MIL-STD-1275Dを参照することをお勧めします。
MIL-STD-1275D は、定常状態を「回路の値が本質的に一定な状態で、初期の過渡または変動状態がすべて落ち着いた後に発生する」と規定しています。また、通常のシステム動作時に固有または自然の変化のみが発生する(つまり、不具合がまったく発生せず、システムのどの部分にも予期しない変化がまったく発生しない)状態であると明確に規定しています。
簡潔に説明すると、定常状態では、入力電圧は比較的一定しています。
表1 に示すように、通常動作モードでの定常状態の入力電圧範囲は25V~30V です。ジェネレータのみモード時(バッテリが接続されていない状態)での定常状態の電圧範囲は少し広く、23V~33Vです。
表1.通常動作モードとジェネレータのみモードで選択したMIL-STD-1275Dの仕様| 仕様 | 通常動作モード | ジェネレータのみモード |
| 定常状態 | 25V < VIN < 30V | 23V < VIN < 33V |
| スパイク | 最大250V、エネルギ=15mJ | 通常動作モードと同じ |
| サージ | 最大40V、~500ms、RIN = 20mΩ | 最大100V、~500ms、RIN = 500mΩ |
| リップル | 大きさ±2V | 大きさ±7V |
スパイク
MIL-STD-1275D のスパイクの定義の引用ではなく、図1 の例を見てください。スパイクは通常、振動し、1ms 以内に減衰して定常状態電圧になります。MIL-STD-1275Dでは、リアクティブ負荷がスイッチングされたときにこれらのスパイクが発生し、ホーンを鳴らす、ビルジ・ポンプの作動、エンジンの始動/ 停止、タレットの回転などのイベントで発生することがあると説明しています。
{kind=link}
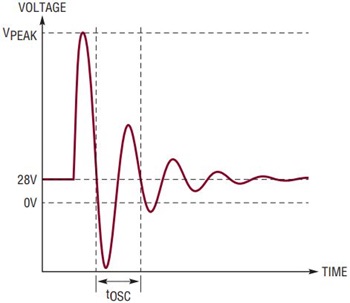
図1. MIL-STD-1275Dのスパイク
その説明はスパイクの理解に役立ちますが、実際の要件は図2(ジェネレータのみモード)で定義されています。さらに、MIL-STD-1275D のサブセクション5.3.2.3、「EDUT に持ち込まれる電圧スパイク」(Voltage Spikes Imported into EDUT)で、推奨の試験設定、および発振に必須の立ち上がり時間と周波数を説明しています。注意すべき重要な事実は、最大エネルギが15mJ に制限されていることです。通常動作モードのスパイクの要件はジェネレータのみモードと似ていますが、通常動作モードの制限が、1msで100V ではなく、40Vである点が異なります。
{kind=link}
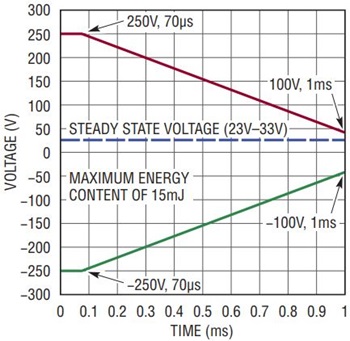
図2. ジェネレータのみモードのスパイクの包絡線
サージ
スパイクは、持続時間が1ms 未満の過渡です。サージは、持続時間がそれより長い過渡です。図3 に、ジェネレータのみモードの制限値を示します。MIL-STD-1275D の推奨試験では、システム入力に50ms の100V パルスを5 つ、1s の間隔で印加する必要があることに注意してください。興味深いことに、図3 に示すサージ状態の包絡線を満たすことはさらに困難です。期間全体の500msで、包絡線が40V に戻らないからです。この記事で説明するソリューションは上記の両方の条件を満たします。繰り返しますが、通常動作モードの要件のほうが簡単です。サージの包絡線は似ていますが、最大値が100Vではなく、40Vである点が異なります。ここで説明していない詳細については、実際の仕様を参照してください。
{kind=link}
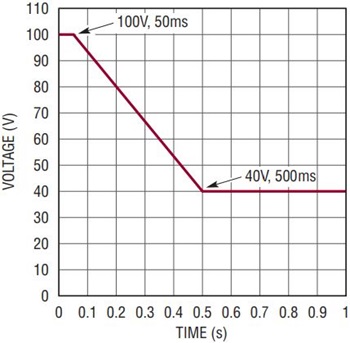
図3. ジェネレータのみモードのサージの包絡線
リップル
リップルとは、定常状態のDC 電圧付近で変動する入力電圧を指す用語です。リップルは、50Hz~200kHz の周波数で構成されていることがあります。ジェネレータのみモードのリップルは、DC の定常状態電圧から±7Vと大きい範囲です。通常モードでのリップルはいくらか小さく、DCの定常状態電圧から±2Vの範囲です。MIL-STD-1275D の仕様には、明示的なテスト条件、および試験用周波数の推奨セットがあります。
始動モード
通常モードとジェネレータのみモードの他に、MIL-STD-1275Dは始動モードを規定しています。これは、エンジン・スターターおよびクランキングに起因する電圧変動を表します。図4 は、MIL-STD-1275D の仕様に記載されているものです。定常状態のDC 電圧から始まり、「初期噛み合いのサージ」で6V に低下します。1 秒以内に立ち上がって、最小電圧が16V の「クランキング・レベル」になります。30 秒以内に再び、定常状態のDC 電圧に戻ります。
{kind=link}
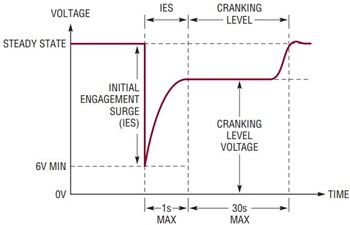
図4. 始動時の外乱
その他の要件
MIL-STD-1275Dでは、システムが破損することなく極性反転に耐えることを規定しています。このような状態は、ジャンパー・ケーブルを反対に接続した場合のジャンプ・スタート時に発生します。
MIL-STD-1275Dでは、別の規格MIL-STD-461(電磁気の互換性要件に関する)に言及していますが、これはこの記事の範囲を超えています。
MIL-STD-1275Dに適合するサージ・ストッパのソリューション
リニアテクノロジー社のサージ・ストッパ製品は、MIL-STD-1275D に適合する強力なソリューションです。代替設計では通常、入力にシャント・クランプを使用していますが、過電圧状態が続く間に破損やヒューズ切れが発生することがあります。
LTC4366 やLT4363 などの高電圧サージ・ストッパでは、大型のパッシブ・コンポーネントを使用して高エネルギ・レベルをグランドにシャントするのではなく、入力電圧のスパイクやサージが発生したときに直列MOSFET を使用して出力電圧を制限します。通常動作では、MOSFETが完全に導通し、MOSFETでの電力損失が最小になります。サージやスパイクで入力電圧が上昇すると、サージ・ストッパが出力電圧を調整し、安全な無停電電力を負荷に供給します。電流制限とタイマの機能が、外部MOSFETをより過酷な条件から保護します。
サージ
MIL-STD-1275D では、ワーストケースのMOSFET 電力損失状態は100V の入力サージ期間に発生します。図5 に示す回路は、出力電圧を44V に調整します。この結果、回路は100V 入力から56V 低下して44V 出力になります。このMIL-STD-1275D のソリューションでは、出力に使用できる電力を増加するために、2 つの直列MOSFET が使用されます。1番目のMOSFET のソースはLTC4366 により66V に調整され、2 番目MOSFET のソースはLT4363により44Vに調整されます。これにより、両方のMOSFETでの電流損失が低減されます。
{kind=link}

図5. 4A/28VのMIL-STD-1275Dのソリューションは、MIL-STD-1275Dの100V/500msのサージおよび±250Vのスパイク時に無停電電力を4A負荷に供給する一方、出力電圧を44Vに制限します。±7Vのリップル時に2.8A負荷に電力を供給します。
図6 および7 に、サージ試験での測定結果を示します。図6 のオシロスコープ波形は、前述したMIL-STD-1275D のサージ要件である100V/500ms の全域で、この回路が動作していることを示します。図7 は、MIL-STD-1275Dの推奨試験に記載されている、制約がより低い100V/50ms パルスでこの回路が動作することを示します。
{kind=link}
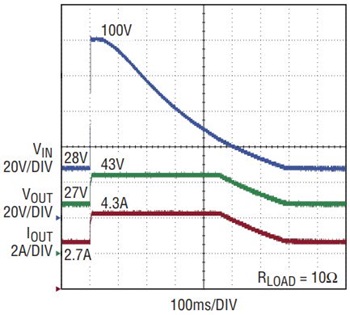
図6. MIL-STD-1275Dの100V/500msのサージ試験
{kind=link}
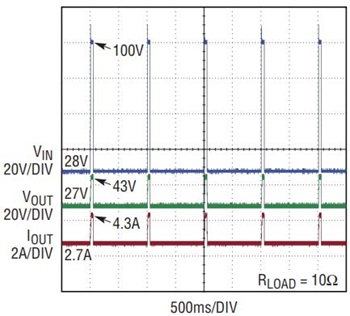
図7. MIL-STD-1275Dの100V/50msのサージ(5回繰り返し)
スパイク
+250V のスパイク状態は、ドレイン-ソース間電圧300V 以上に耐える定格をもつMOSFETM1 が処理します。MIL-STD-1275Dでは入力エネルギが15mJ に制限されることを規定しており、この値はこのMOSFET の仕様範囲内です。図8 に、入力における+250V のスパイクが出力からブロックされることを示します。
{kind=link}
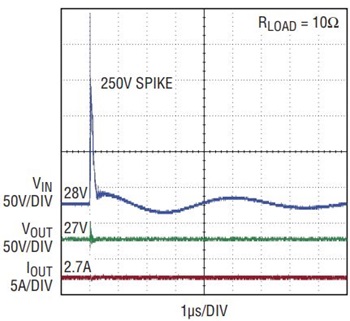
図8. 正の入力スパイク
同様に、図9 に、–250V のスパイク試験の結果を示します。この状態では、–250V のスパイク時にダイオードD1 が逆バイアスされ、スパイクをM2と出力からブロックします。D1 は逆極性保護も行い、負の入力電圧が出力に現れることを防ぎます(D1の上流にあるLTC4366サージ・ストッパは、追加の保護なしで逆電圧と–250Vのスパイクに耐えることができる)。
{kind=link}
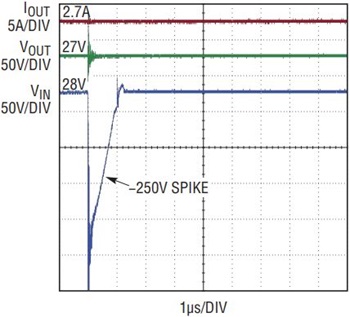
図9. 負の入力スパイク
オプションの双方向トランジェント電圧サプレッサ(TVS)が入力位置にあり、追加の保護を行います。この150V のブレークダウン電圧は、100V 未満での回路動作には影響しません。入力位置にTVS があることが望ましくないアプリケーションでは、このオプションのコンポーネントを取り除くことができます。図8 および9では、MIL-STD-1275D のスパイクが存在する間、出力電圧トレース(VOUT)は高周波数のうなりを示します。これは、0.1μF の試験コンデンサが回路入力位置で直接放電し、すべての抵抗とインダクタンスが最小になったときに電源とグランドのトレースに流れ込む大電流による測定値の乱れであることに注意してください。
リップル
MIL-STD-1275D のリップル仕様に適合するには、さらにいくつかのコンポーネントが必要です。ダイオードD1とコンデンサC1~C12を組み合わせて、AC 整流器が構成されます。この整流信号がDRAIN2ノードに現れます。
LT4363と検出抵抗RSENSEの組み合わせが、最大電流を5A(代表値)に制限します。入力波形の立ち上がりが出力コンデンサを5A を超える電流でプルアップしようとした場合、LT4363 がM2 のゲートをプルダウンして電流を一時的に制限します。
ゲート電圧を即座に復元するために、コンポーネントD3~D4、C13~C15で構成する小型チャージ・ポンプがLT4363 の内部チャージ・ポンプを補助してMOSFET M2 のゲートを即座にプルアップします。これを行った場合でも、このリップル状態の間、使用できる負荷電流を2.8Aに低下させる必要があります。図10に、リップル試験時に出力が駆動され続けていることを示します。
{kind=link}

図10. 14VP–P 入力リップル状態
過熱
最後に、過熱保護はコンポーネントQ1、Q2、R1~R4、およびサーミスタRTHERM により実装されます。M2 のヒート・シンク温度(HS3)が105°C を超えた場合、LT4363 のUVピンがQ2A によりプルダウンされてMOSFET M2を強制的にオフにし、最高温度を制限します。
注意する点として、指定したコンポーネントで構成されるこの回路は、MIL-STD-1275D に規定された最小電圧6Vではなく、始動モードの初期噛み合いサージの発生時における最小電圧8Vで動作することのみが保証されます。
通常、MIL-STD-1275D 適合システムの入力位置にEMIフィルタが配置されます。フィルタ処理のニーズはサージ・ストッパで解消されませんが、サージ・ストッパのリニア・モード動作は追加ノイズを生じません。
まとめ
リニアテクノロジー社のサージ・ストッパ製品は、MIL-STD-1275D への適合を簡略化します。MOSFETを使用して高電圧入力のサージとスパイクをブロックする一方、下流の回路に無停電電力を供給します。直列コンポーネントにより電圧をブロックすることで、大型のパッシブ・コンポーネントを使用する回路が高エネルギをグランドにシャントしようとするときに発生する可能性があるヒューズ切れや破損を防止します。さらに、この記事では、最大過渡電力損失(高電圧サージの発生時など)が単体のMOSFET の能力を超える場合でも、複数の直列MOSFETを使用して高電力レベルに対応できることを示しました。
著者について
Linear Technologyでのキャリアは、電源トラッキング・コントローラ「LTC2923/LTC2925」、高電圧に対応するデュアル理想ダイオードOR「LTC4355」...

















