

AN-2592: ホーム・バス・システム用インダクタ選択ガイド
要約
ホーム・バス・システムなどの2 線式Power over Data(PoD)アプリケーションでは、データ信号をDC 電源から分離するために「AC 阻止」インダクタが用いられます。通信ネットワークの設計に際しては、適切なインダクタを選択することが重要になります。このアプリケーション・ノートでは、アプリケーションに対するインダクタ選択基準とそのインダクタの選択を適格化する方法について、概説します。
はじめに
産業用オートメーションやビル管理システムにおける通信ネットワークでは、ノードが電源コンセントを使用できない場合に、コントローラ・ボードやセンサーまたはアクチュエータのボードなどの複数のボード間でデータと電力の両方の接続を可能にするソリューションが必要となるケースが多くあります。すべてのボードが1 つのシャーシに収まっている場合にはこれは簡単に実現できます。しかし、標準的なコントローラノード・ネットワークのボードは互いに何メートルも離れていることが多く、ノード間の距離が長くなるにつれ、また、ノードの数が増加するにつれ、ケーブル配線のコストが増大して全体的なソリューション・コストに占める割合が著しくなり、システム性能を決める大きな要素の1 つとなります。
1 つのソリューションは、4 線式ケーブル配線を用いることです。この場合、1 つのペアがデータ通信に用いられ、もう1 つのペアが電力供給に用いられます。この方法は、比較的単純なソリューションであるという利点がありますが、ケーブルのコストと重量が余分に必要となるという欠点があります。よりすっきりしたソリューションは、1 対のワイヤを用いてデータと電力の両方を供給することです。Power over Data(PoD)ソリューションがその例です。
異なるタイプのエンド・アプリケーションに対応して、多くの異なるPoD ソリューションが開発されています。このアプリケーション・ノートでは、産業用通信システムやビルディング・オートメーション管理システムに共通して見受けられる、より独自性の高い、あるいはより特化されたネットワークに目標を絞ったPoD ソリューションについて説明します。これらのソリューションは、一般にPower over Ethernet(PoE)と呼ばれているイーサネット・インターネット・プロトコル(IP)ベースのソリューションや、より新しいPower over Data Lines(PoDL)と呼ばれるシングル・ペア・イーサネット(SPE)ソリューションの場合とは異なるものです。PoE やPoDL ソリューションの詳細については、アナログ・デバイセズのChronous ポートフォリオを参照してください。
Power over Data 技術
技術の概要
Power over Data(PoD)技術では、ネットワークを介して接続されたデバイスに2 線式バスを用いて電力とデータの両方を同時に伝送します。電力は2 線式バスに誘導結合され、データは容量結合されます。PoD ソリューションでは、各ノードでDC 電源からACデータ信号を「阻止」するためにインダクタが必要です。これらのインダクタは一般に「AC 阻止」インダクタと呼ばれています。2 線式バスと各ノードのトランシーバの間には、データ信号をバスに結合するためにキャパシタが必要です。これらのキャパシタは一般に「AC 結合」キャパシタと呼ばれています。
図1 に、2 線式バス上の代表的なマルチノードPoD ネットワークを示します。これは、ドライバとレシーバ用に1 対のラインを用いる半2重ネットワークで、どちらの方向にもデータ伝送が可能ですが両方向同時には伝送できません。いずれか1 つのノードが任意のタイミングでバスに送信でき、他のノードはすべてそのデータを受信できます。「バス」は2 線式のケーブルで、通常ツイスト・ペア・ワイヤまたはパラレル・ワイヤです。このケーブルには特性インピーダンス(Z0)があり、図1 において、終端抵抗(RT = Z0)がノード1 およびノードN に取り付けられて最高の信号品質を実現しています。標準的なマルチノードPoD では、1 つのノードがバスに電源電力を供給でき、複数のノードがバスから受電できます。ここに示した例では、ノード1 がバスに電力を供給し、他のn−1 個のノードは負荷または受電部となります。

図1. マルチノードPower over Data(PoD)ネットワーク
多くの産業用PoD システムでは、物理レイヤに標準的なRS-485(またはCAN)トランシーバが用いられ、独自の方法によりデータ・ラインに電力が供給されます。そのようなトランシーバは熟知されたものであり、ノイズの多い工業環境においても堅牢なデータ伝送が可能です。システム・エンジニアが直面する課題は、費用効率が高く、また、使用するPCB 面積が最小限に抑えられた、信頼性の高い堅牢な給電方法を開発することです。しかし、「AC 阻止」インダクタは、ネットワークのデータレートおよび電力容量に応じて、そのサイズやコストが大きく変動します。
RS-485 は物理レイヤの規格(OSI モデルのレイヤ1)であるため、固有のデータ・リンク・プロトコル(フレームやパケット等)がありません。PoD ネットワークの場合、実装するプロトコル・ソフトウェアにある種のデータ・エンコーディング方式(マンチェスター・エンコーディングや8b/10b など)を含めることで、バスを介して給電する際にDC 不平衡を生じるおそれのある、0 または1 が長く連続する可能性を除去する必要があります。この種のエンコーディングの短所は、余分なプロセス・サイクルが必要になり遅延が増加する可能性があることです。
PoD アーキテクチャを採用するシステム・インターフェースは、比較的低データレート(通常5Mbps 未満)である傾向があり、そのため、多くのノード(64 個以上)をサポートでき、また長いケーブル長(数百メートル)に対応できます。独自の通信プロトコルが用いられることも多く、これはクローズドシステムには問題ありませんが、そうでない場合には機器の相互運用性を制限する可能性があります。
システムに関する考慮事項
標準的なシナリオにおいては、PoD ソリューションを探す場合、次の要件チェックリストが有用です。
- 給電(電源ノードでは通常24V DC、受電ノードではノードあたり2W~5W)
- 極性に依存せず、現場での接続を簡単化し配線ミスを低減可能
- バスのDC 平衡を維持できるデータ・エンコーディング方式
- インダクタ・サイズを最小化して、コストとPCB 面積を節約
- ESD やEFT などの過渡耐性を含む堅牢な性能
電源部と受電部の比較
最も一般的なのは、ネットワーク上の1 つのノードが電源(図1 のノード1)で、複数のノードが電力の供給先である受電部となっているようなシステムを構築することです。これらの様々なノード用に「AC 阻止」インダクタを検討する場合には、様々な点を考慮することが必要です。電源ノードのインダクタは、全電力をネットワーク全体に供給できなくてはなりません。つまり、通常、「AC 阻止」インダクタのサイズは大きくなります。受電ノードのインダクタは、各ノードの局部的な電力に対応するよう最適化する必要があります。
インダクタ・サイズ
各ノードでの「AC 阻止」インダクタの機能は、AC データ信号とDC 電源電力を分離することです。PoD システムで用いられる比較的低いデータレートの場合、これらのインダクタはミリヘンリー(mH)程度であり、これには大がかりでコストを要するインダクタ設計が必要です。図2 に、PoD システムに必要なチャンネル・データレートあたりのインダクタンスを示します。

図2. チャンネルあたりの最小インダクタンスと周波数の関係
対応する電流供給量が多くなるほど、インダクタ・サイズは大きな要素となり、フォームファクタは縮小し続けるため、システム設計にとって大きな障害になる可能性があります。
ホーム・バス・システム
ホーム・バス・システムのアーキテクチャの概要
ホーム・バス・システム(HBS)は、ホーム・オートメーション・アプリケーションやビルディング・オートメーション・アプリケーション向けに最適化された、一般的なPoD ソリューションです。アナログ・デバイセズのホーム・バス製品ファミリは、高効率かつ高性能のPoD アプリケーションを可能にします。ホーム・バスの規格とその運用の詳細については、Introduction to Home Bus Application Noteを参照してください。
MAX22288 トランシーバは、電力を供給するために外部「AC 阻止」インダクタを必要とするPoD システムにおいて、電源ノードで動作するよう設計されています。MAX22088 トランシーバは「AC 阻止」インダクタを内蔵しているため、外部「AC 阻止」インダクタを必要とすることなく、PoD システムの電力の供給先である受電ノードで用いることができます。
図3 に、MAX22288 を用いた1 つのノードが電源部として機能し、MAX22088 を用いたもう1 つのノードが受電部として機能する、2 ノードのホーム・バス・ネットワークを示します。このアプリケーション・ノートでは、図3 においてL1 と表記した電源ノード用のインダクタを選択する方法を説明します。なお、MAX22088 には能動的なインダクタ回路が内蔵されており、システム設計を簡素化すると共に、PCB 面積を縮小し、コストを削減することができるため、受電ノードには外部インダクタは不要です。

図3. 代表的な2 ノード・ホーム・バス・システム
バス終端
ホーム・バスの規格は、表1 に示すように、異なる通信距離についてバスの負荷抵抗を仕様規定しています。バスの負荷抵抗は、すべてのドライバとレシーバに対し最小の差動電圧を維持するのに必要な、2 線式バス上の最小抵抗(最大負荷)です。実際のアプリケーションにおいては、負荷抵抗はトランシーバの終端抵抗(RT)で概ね決まり、また、これらの抵抗は、バス上で最高の信号品質を実現できるよう、ケーブルの特性インピーダンス(Z0)に一致する必要があります。
| Maximum Distance | Bus Load Resistance* |
| 200m | 75Ω |
| 1000m | 100Ω |
| * 異なる特性インピーダンス(Z0)のケーブルを用いる場合、終端抵抗(RT)はアプリケーションでの実際のケーブルの特性インピーダンスに一致するよう調整する必要があります。 | |
MAX22288 とMAX22088 は、動的なケーブル終端、設定可変のレシーバ・スレッショルド、信号品質の改善を実現する送信ドライバ・スルー・レート、柔軟な設計といった特徴を備えています。これらの特徴の詳細については、MAX22288 のデータシートを参照してください。
バス・インダクタンス
バスの合計負荷インピーダンス(ZBUS)は、終端抵抗(RT)、インダクタンス(ZL)、バスから見たキャパシタンス(ZC)の組み合わせで、その値は、表1 に示す最小バス負荷抵抗より大きくなくてはなりません。図4 に、各ノードにMAX22288 を用いた2 ノード・ホーム・バス・ネットワークの簡略化した等価モデルを示します。ここで、ノード1 はバスに電力を供給し、ノード2 はバスから電力の供給を受けます。

図4. 2 ノード・ホーム・バス・ネットワークの簡略化した等価モデル
合計バス・インピーダンスを計算するには、バス上のすべての部品を考慮に入れ、次のようにZBUS を計算します。
ZBUS = ZL1 || (ZC1 + R1 + ZC1) || ZL2 || (ZC2 + R2 + ZC2)
L1、C1、R1 はノード1 の部品値で、f はヘルツを単位とするデータレートです。
AC 阻止インダクタL1 のインピーダンスはZL1 = 2π × f × L1
AC 結合キャパシタC1 のインピーダンスはZC1 = 1/(2π × f × C1)
終端抵抗はR1
同様に、L2、C2、R2 はノード2 の部品値です。
システム設計パラメータを次のように仮定します。
終端抵抗R1 = R2 = 1kΩ で、ホーム・バス・トランシーバ・ノードは高インピーダンス
AC 結合キャパシタC1 = C2 = 22μF
データレートは10kbps、またはf = 5kHz
バスの合計インピーダンス(ZBUS)は、ホーム・バスに必要なバスの負荷を満たすために、少なくとも100Ω であることが必要です。
ZBUS = 100Ω = ZL1 || ZL2 || (2 x ZC1 + R1) || (2 x ZC2 + R2)
2 ノード・ネットワークでは、供給される合計電力は分配される合計電力に等しくなります。したがって、一様なインダクタを仮定し(L1 = L2)、ZL について解くと以下のようになります。
100Ω = ZL || ZL || (2 x (1/(2π x f x 22μF)) + 1kΩ) || (2 x (1/(2π x f x 22μF)) + 1kΩ) = ZL || ZL || 1002.89 Ω || 1002.89 Ω
ZL = 250Ω
10kbps のデータレートの場合、必要なインダクタンスL1 およびL2 は次のように求まります。
L1 = L2 = 250Ω / (2 x π x 5e3) = 8mH
表2 に、代表的な2 ノード・ホーム・バス・アプリケーションに必要な最小合計インダクタンスを示します.
| Data Rate (kbps) | 10 | 20 | 50 | 100 | 200 |
| Total Inductance (mH) | 4 | 2 | 0.8 | 0.4 | 0.2 |
| 注:ZBUS = 100Ω と仮定 | |||||
MAX22088 トランシーバを受電ノードで用いる場合、MAX22088 に内蔵された「アクティブ・インダクタ」を用いてノードに電力を供給できます。このアクティブ・インダクタンスは調整可能で、MAX22088 のデータシートの「Active Inductor」のセクションに示されている式を用いることで、様々なバス条件に対し最適化できます。
MAX22088 の能動回路の実装方法が原因で、MAX22088 の過渡応答は標準的な差動モードのインダクタとは異なる点に注意してください。更に、動的なケーブル終端を可能にするため、動的終端が接続されたときのバスのインピーダンスの急激な低下を補償できるよう、インダクタンス値を増加することを推奨します。詳細については、MAX22088 のデータシートの「Dynamic Cable Termination」のセクションを参照してください。複数のノードが接続されたより複雑なシステムでは、インダクタ値は変化します。図5 に、マルチノード構成の各ノードに必要なバス・インダクタンスの概算値を、様々なノード数について示します。

図5. マルチノード・ホーム・バス・ネットワークでの各ノードに必要なバス・インダクタンス
ケーブルの長い通信システムでは、反射を減らし信号品質を向上するために、両端でのケーブル終端が重要となります。最も遠い2 つのノードのみを終端することが重要です。それ以外の場合、バスの負荷が著しく増加します。アプリケーションの速度が高くなると、必要なインダクタンスは小さくなります。ただし、インダクタンスを追加しても動作への悪影響はありません。
インダクタの選択
MAX22288 電源ノードと共に使用する「AC 阻止」インダクタの選択は、マルチノード・ネットワークでの高信頼性動作を確保する上で極めて重要です。2 線式バスには2 個のインダクタつまりインダクタ・ペアが必要です。
インダクタ・ペアは、回路での接続方法に応じて異なるモードに構成できます。最も一般的な構成は、差動モードおよびコモンモードの2 つです。差動モードでは、電流が1 つのインダクタを1 つの方向に流れ、別のインダクタを逆方向に流れて戻ることでサイクルを完了します。コモンモード構成では、電流が両方のインダクタを同じ方向に流れます。これらの構成が果たす目的は異なります。
差動モード構成は、差動モード信号を抑制しますが、コモンモード信号は通します。差動モード信号に対しては、磁束はインダクタ内を互いに逆方向に進行して打ち消し合うため、差動信号はチョークを通過できます。
コモンモード構成はコモンモード信号を通す際には高インピーダンスになり、差動モード信号を通す際には低インピーダンスになります。図6 に、2 線式コモンモード・チョークとして配置された2 つのインダクタを示します。磁束はコモンモード信号により同じ方向に発生するため、コモンモード信号を抑制します。

図6. コモンモード・チョークの動作
ホーム・バス・アプリケーションでは、データは2 線式バスを差動で通過するため、「AC 阻止インダクタ」(実際は1 対のインダクタ)は、これらの差動モードのデータ信号に対し高インピーダンスになる必要があります。差動モード・インダクタンスは、これらの差動モード・データ信号を抑制します。そのため、「AC 阻止」インダクタは、動作時に差動モード・インダクタンスを供給する必要があります。
図7 の左側の図では、電源ノードのインダクタ・ペア(図3 のL1)が差動モードで構成されている場合の正常な通信を示していますが、右側の図では同じインダクタ・ペアがコモンモードで構成されている場合の異常な波形を示しています。

図7. 「AC阻止 」インダクタには差動モード構成を用いる必要があります
ホーム・バス・アプリケーションに差動モード「AC 阻止」インダクタを選択する場合には、以下の基準を満たす必要があります。
- インダクタ・ペアの巻数比は1:1 であることが必要です。これは、データ信号は互いの方向が逆で振幅が対称であるため、バランスのとれた動作を実現するためです。
- 飽和電流は、バスの全動作電流よりも大きいことが必要です。コアが飽和するとインダクタンスは著しく減少します。
- インダクタ・ペアは、最小限必要な値以上の差動モード・インダクタンスを備える必要があります。必要なインダクタンスの大きさを決定するには、バス・インダクタンスのセクションを参照してください。
- インダクタ・ペアは、低DC 抵抗(DCR)(通常は10Ω 未満)であることが必要です。低DCR とすることによって、DC 電力の転送時の電圧低下を抑制し、ネットワークの全体的な効率を向上できます。
- 通常動作時にインダクタ・ペアが「誘導性」の動作を確実に行えるよう、自己共振周波数を少なくともデータレートの10 倍以上とすることを推奨します。
インダクタのオプション
アナログ・デバイセズは、ホーム・バス・アプリケーションでの「AC阻止」インダクタとして、結合インダクタまたは2 個の個別インダクタを使用することを推奨します。
| 長所 | 短所 | |
| 結合インダクタ | 結合が高いほどインダクタンスが大きくなる。サイズは通常、2 個の個別インダクタを用いるより小さい。 | アプリケーションのニーズに合うものを見つけるのが困難。 |
| 2 個の個別インダクタ | 独自のインダクタ・ペアを設計することでソリューションをカスタマイズできる。 | 物理的なサイズは結合インダクタより大きい。 |
トランスやコモンモード・チョークを「AC 阻止」インダクタとして用いることは推奨できません。
結合インダクタの使用
差動モードの結合インダクタをホーム・バス・システムと共に使用することを推奨します。このような結合インダクタの呼び方は、パワー・インダクタ、チョーク、更にはトランスなど、メーカーによって様々です。結合インダクタは、結合係数(k)が1 に近い共通コアを介して結合されたインダクタのグループです。k が1 に近いほど、磁気的な結合が良好になり、漏れは低減します。一般的に、結合インダクタは、フライバック・コンバータ回路などのパワー・エレクトロニクス回路で用いられています。DC 抵抗と定格電流はホーム・バス・アプリケーションの要件を満たす場合がありますが、通常、インダクタンスは数百マイクロヘンリー(μH)未満です。結合インダクタをホーム・バス・アプリケーションで用いるためには、十分なインダクタンスを持つものを選択し、そのテスト条件に注意を払う必要があります。多くの場合、インダクタのデータシートの仕様は、ホーム・バス・アプリケーションとは異なる条件で特性評価されたものです。そのため、差動モード・インダクタンスの測定のセクションに示す手順に従って、目標とする動作条件で差動モード・インダクタンスを測定して評価することを推奨します。
2 個の個別インダクタの使用
2 個の個別インダクタを用いて、PCB 上で独特の「結合インダクタ」を作ることができます。このオプションを使用する場合は、次の2 つのルールに従う必要があります。
ルール1:磁束の漏れを減らすため、これらのインダクタは互いにできるだけ近づけて配置します。
ルール2:これらを差動モードで組み合わせます。差動モード信号が通過した場合に磁束が同じ方向に発生するように、2 個の個別インダクタを配置してください。
次の例では、2 個の8.3mH のコイル・インダクタを用い、それぞれのコアとその間の空間を介して結合したインダクタ・ペアを作ります。

図8. グループ化した2 個の個別インダクタとその構成の図解:(A) 差動モード接続、(B) PCB 上、(c) 差動モード信号を通す際の磁界
ルール1:磁束の漏れを減らすため、これらのインダクタは互いにできるだけ近づけて配置します。
2 個のインダクタが「結合」した場合、ペアの合計インダクタンスは、L1 とL2 を直列に組み合わせた値であるL1 + L2 を上回ります。合計インダクタンスLTOTAL はL1 + L2 + 2M と計算されます。ここで、MはL1 とL2 の磁気結合によって生成される相互インダクタンスです。相互インダクタンスMはk × √(L1 × L2)で計算されます。ここで、k は0~1 の値の結合係数です。k = 1 の場合、磁束の漏れがなくL1 とL2 の間の磁気結合が100%であることを意味します。図8(C)に、2 個のインダクタの間の磁気結合を赤色の線で示します。2 個のインダクタが近ければ近いほど、結合は理想的なものになり、漏れが減少し、その結果、相互インダクタンスMは大きくなります。
結合係数k が1 の場合、図8(A)に示すように構成された2 個の8.3mH のインダクタの最終的な差動モード・インダクタンスはL1 + L2 +2k × √(L1 × L2) = 33.2mH となります。現実には、結合係数k は常に1 未満です。2 個のインダクタが1mm 離れて配置された場合、差動モード・インダクタンスの測定値は25.8mH となります。この減少は磁束の漏れが原因です。相互インダクタンスは、M = 0.5 × (25.8mH −8.3mH × 2) = 4.6mH となります。つまり、結合係数はk = M/√(L1 × L2) = 4.6mH/8.3mH = 0.55 です。
2 個のインダクタを1cm 離して配置した場合は、最終的な差動モード・インダクタンスは更に減少し、19.3mH と測定されます。結合係数は0.33 に減少します。
2 個のインダクタを10cm 離して配置した場合は、差動モード・インダクタンスの測定値は16.6mH となり、2 個の個別インダクタを磁気結合させずに直列に接続した場合と同じ値になります。これは、磁気結合が弱すぎて有意の相互インダクタンスを発生できないことを意味します。
ルール2:これらを差動モード構成で組み合わせます。差動モード信号が通過した場合に磁束が同じ方向に発生するように、2 個の個別インダクタを配置してください。
結合ペアがコモンモード構成で配置されている場合、図9 に示すように、差動モード信号を通すと両コンダクタの磁束が同じ方向に発生し、打ち消し合います。合計インダクタンスLTOTAL は減少し、L1 とL2 を直列に組み合わせた場合の値を下回ります。

図9. (A) コモンモード接続、(B) PCB 上、(C) 差動モード信号を通す際の磁界
図8(B)に示すように、2 個のインダクタを1cm の間隔をおいて差動モード構成で配置した場合、差動モード・インダクタンスの測定値は20.3mH となり、2 個の個別インダクタを直列に組み合わせた値16.6mH より大きくなります。磁束が加算され、最終的な結合インダクタンスが大きくなります。
図9(B)に示すように、1cm の間隔をおいてコモンモード構成で配置した場合、差動モード・インダクタンスの測定値は14.7mH となり、16.6mH より小さくなります。磁束が打ち消し合い、差動モードの最終的な結合インダクタンスは減少します。
図10 および図11 では、2 つのホーム・バス・ノードが50kbps で通信を行い、「AC 阻止」インダクタ・ペアは2 個の個別のインダクタを用いて作られています。50kbps のデータレートに必要な合計バス・インダクタンスは、表2 より0.8mH となります。図10 に、歪みの生じたレシーバ波形を示します。これは、2 個の390μH のインダクタを用いて合計インダクタンスを最小限必要なバス・インダクタンスより小さい780μH とした場合のものです。インダクタ・ペアへの負荷は200mA の電流で、これによりバスの合計実効インダクタンスは更に減少します。図11 に、同じ動作条件での歪みのないクリーンなバス波形を示します。これは、インダクタ・ペアを2 個の3.9mH のインダクタで構成してバス・インダクタンスを必要最小値より大きな値にした場合のものです。

図10. 2 個の390μH のインダクタを「AC 阻止」インダクタ・ペアとして用いた場合の50kbps のバス波形

図11. 2 個の3.9mH のインダクタを「AC 阻止」インダクタ・ペアとして用いた場合の50kbps のバス波形
トランスの使用
電力トランスを用いると、1 次側と2 次側の間で昇圧または降圧が行われます。ホーム・バス・アプリケーションでトランスを用いる場合は、以下の要件に注意が必要です。
確実に巻数比が1:1 であるようにします。通常ほとんどのトランスの巻数比は1:1 ではありません。通常、1 次側と2 次側とで異なるAC電圧となることが想定されています。
差動モード・インダクタンスをコイル・インダクタンスとして測定した値は、多くの場合、データシートには仕様規定されていません。一般にトランスはオーバーサイズであり、格段に大きなフットプリントとなります。
コモンモード・チョークの使用
コモンモード・チョークは、コモンモード・ノイズをフィルタ除去するために設計されています。以下の理由で、大半のコモンモード・チョークは、ホーム・バス・アプリケーションに適した選択肢ではありません。
差動モード・インダクタンスは、コモンモード・インダクタンスに比べはるかに小さな値です。
コモンモード・チョークの電流定格は比較的小さく、その代表的な動作周波数は、多くの場合、ホーム・バス・アプリケーションで用いられるデータレートよりはるかに高い値です。
差動モード・インダクタンスの測定
大半というわけではないにしても、多くのインダクタのデータシートには、ホーム・バス・アプリケーションで用いられるデータレートとバイアスされた電流での差動モード・インダクタンスに関する情報が記載されていません。たいていの場合、選択したインダクタ・ペアを適格化するための最も簡単な方法は、LCR メータを用いてそのペアを評価することです。アプリケーションのデータレートとバイアス電流で差動モード・インダクタンスと位相を測定しますが、その際に以下の点に注意してください。
理想的なインダクタの位相は+90º です。つまり、電流は電圧に比べ90º 遅れています。
インダクタのコアが飽和すると、インダクタンスは急激に低下します。データシートにロールオフのレートが仕様規定されている場合もあります。
インダクタごとに自己共振周波数があり、通常この値はDC バイアス電流と共に変化します。
LCR メータを用いることが、選択したインダクタの特性を評価するための最も簡単な方法です。図12 に、LCR メータを用いて差動モード・インダクタンスを測定するための代表的なセットアップを示します。表3 には、Instek LCR-6300 メータを用いて実験室で行った測定の例を4 つ示します。また、それらの200kbps のデータレート、200mA の負荷電流におけるホーム・バス・アプリケーションでの性能も併せて示します。

図12. LCR メータでの差動モード・インダクタンスの測定
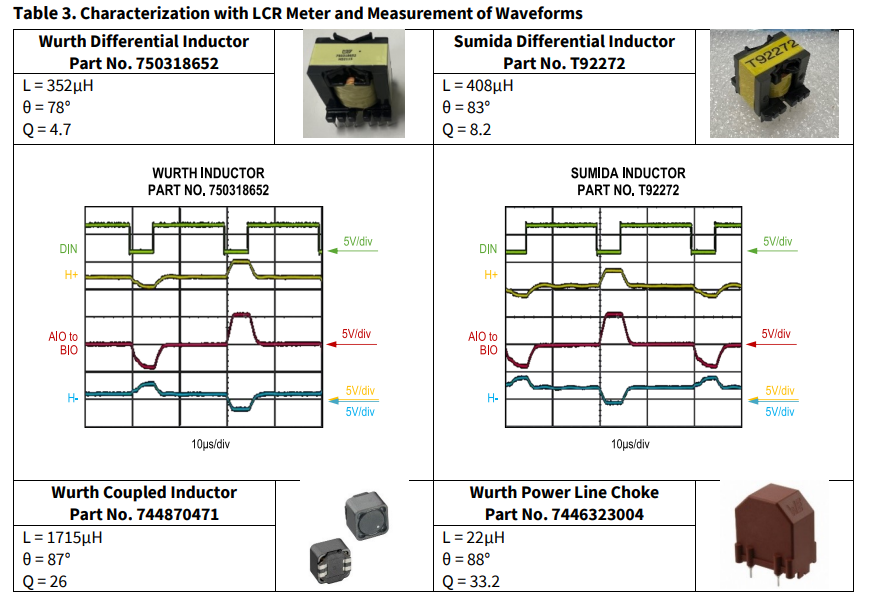
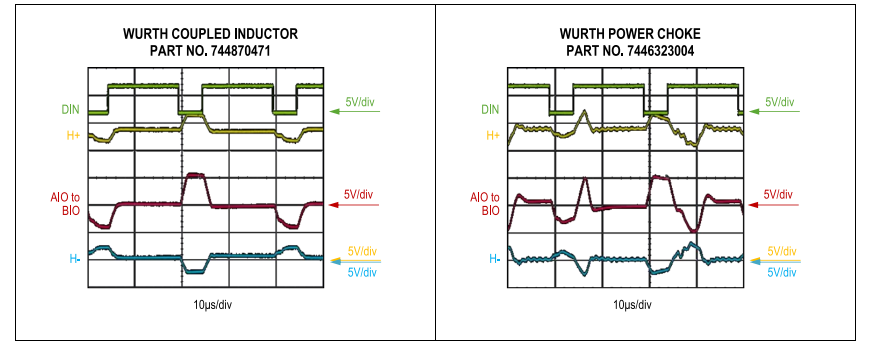
表2 によれば、200kbps の場合に最小限必要な合計バス・インダクタンスは200μH です。Würth のコモンモード電源ライン・チョーク(製品番号7446323004)は、この必要最小限の差動モード・インダクタンスを備えていないため、バス波形は歪んでいます。
設計例
例1:57.6kbps での2 ノード・ネットワーク
図3 に示すように、57.6kbps のデータレートで動作する2 ノード・ホーム・バス・ネットワークを検討します。図13 は、簡略化した等価モデルです。電力源ノードで「AC阻止」インダクタL1 を介してバスに100mAが供給され、MAX22088 がその内蔵「アクティブ・インダクタ」を介してバスから電力を受けます。この例では、部品は57.6kbps のデータレートに対して最適化されており、L1 の「AC 阻止」インダクタにはWürth Electronics, Inc.の100mH の結合インダクタ(製品番号750318652)が選択されています。

図13. 2 ノード・ネットワークの等価モデル
この結合インダクタをアプリケーションに対し適格化するために、バスの合計インピーダンスZBUS = ZL1 || (ZC1 + RIO1) || (ZC1 + RIO1) || ZLAC ||(ZC2 + REQV + ZC2)を計算します。ここで、
ベンチでの特性評価結果から、L1 = 138mH(20kHz 時)で100mA でバイアス
MAX22088 のデータシートの式を用いてLAC = 22.4mH
静的終端抵抗RTRM2 = 1kΩ
MAX22288 のAIO/BIO の入力インピーダンスRIO1 = 30kΩ(代表値)
MAX22088 のAIO/BIO の入力インピーダンスRIO2 = 10kΩ(代表値)
REQV = 952Ω(式:1/REQV = 1/(2 × RIO2) + 1/RTRM2 から導出)
結合キャパシタ = 2.2μF
データレート = 57.6kbps、またはf0 = 28.8kHz
したがって、
ZL1 = 2π x f0 x L1 = 25kΩ
ZLAC = 2π x f0 x LAC = 4kΩ
ZC1 = ZC2 = 1/(2π x f0 x 2.2μF) = 2.5Ω
ZC1 + RIO1 = 30kΩ
ZC2 + REQV + ZC2 = 957Ω
したがって、ZBUS = ZL1 || (ZC1 + RIO1) || (ZC1 + RIO1) || ZLAC || (ZC2 + REQV + ZC2) = 25kΩ || 30kΩ || 30kΩ|| 4kΩ || 957Ω = 713Ω となり、最小限必要なバス終端抵抗値100Ω より大きな値となります。
このWürth の結合インダクタは、MAX22088 とMAX22888 の両方の評価用キットで設計されており、57.6kbps のホーム・バス・アプリケーションに対応します。
例2:200kbps での8 ノード・ネットワーク
この例では、図14 に示す、200kbps で動作する8 ノードのホーム・バス・システムの動作を検討します。L1 は、バスに合計250mA を供給する電源ノードの「AC 阻止」インダクタであり、Würth Electronics, Inc.の結合インダクタ(製品番号744851102)を使用できるかどうかを判定する必要があります。

図14. 簡略化した8 ノード・ホーム・バス・システム
バスの合計インピーダンスはZBUS = ZNODE1 || ZNODE2 || ZNODE3 || ZNODE4 || ZNODE5 || ZNODE6 || ZNODE7 || ZNODE8 です。ここで、
ZNODE1 は、電源ノードであるノード1 の合計インピーダンスです。
ZNODE2~ZNODE6 は、データのみのノードであるノード2~6 の合計インピーダンスです。
ZNODE7 およびZNODE8 は受電ノードであるノード7 および8 の合計インピーダンスです。

図15. 等価回路。(A) ノード1(電源ノード)、(B) ノード2~6(データのみのノード)、(C) ノード7~8(受電ノード)
図15(A)に示す電源ノードとその等価回路について検討すると、ZNODE1 = ZL1 || (ZC1 + REQV1 + ZC1)となります。ここで、
ベンチでの特性評価結果から、L1 = 358μH(100kHz 時)で250mA でバイアス
静的終端抵抗RTRM1 = 1kΩ
MAX22288 のAIO/BIO の入力インピーダンスRIO1 = 30kΩ(代表値)
REQV1 = 983.6Ω(式:1/REQV1 = 1/(2*RIO1) + 1/RTRM1 から導出)
結合キャパシタ = 1μF
データレート = 200kbps、またはf0 = 100kHz
したがって、
ZL1 = 2π x f0 x L1 = 225Ω
ZC1 = 1/(2π x f0 x 1μF) = 1.6Ω
ZC1 + REQV1 + ZC1 = 987Ω
したがって、ZNODE1 = 225Ω || 987Ω = 183Ω となります。
図15(B)に示すデータのみのノードとその等価回路について検討すると、ZNODE2-6 = (ZC1 + RIO1) || (ZC1 + RIO1)となります。ここで、
MAX22288 のAIO/BIO の入力インピーダンスRIO1 = 30kΩ(代表値)
ZC1 = 1/(2π x f0 x 1μF) = 1.6Ω
したがって、ZNODE2-6 = (30kΩ + 1.6Ω) || (30kΩ + 1.6Ω) = 15kΩ となります。
図15(C)に示す受電ノードとその等価回路について検討すると、ZNODE7-8 = ZLAC || (ZC2 + RIO2) || (ZC2 + RIO2)となります。ここで、
MAX22088 のデータシートの式を用いると50mA の負荷電流時にLAC7 = 35mH
MAX22088 のデータシートの式を用いると200mA の負荷電流時にLAC8 = 16mH
MAX22088 のAIO/BIO の入力インピーダンスRIO1 = 10kΩ(代表値)
したがって
ZLAC7 = 2π x f0 x LAC7 = 22kΩ
ZLAC8 = 2π x f0 x LAC8 = 10kΩ
ZC2 = 1/(2π x f0 x 1μF) = 1.6Ω
したがって、ZNODE7 = 22kΩ || (10kΩ + 1.6Ω) || (10kΩ + 1.6Ω) = 4kΩ、ZNODE8 = 10kΩ || (10kΩ + 1.6Ω) || (10kΩ + 1.6Ω) = 3.3kΩ となります。
バスの合計インピーダンスはZBUS = ZNODE1 || ZNODE2 || ZNODE3 || ZNODE4 || ZNODE5 || ZNODE6 || ZNODE7 || ZNODE8 = 183Ω || (15kΩ/5) || 4kΩ || 3.3kΩ = 157Ωとなり、最小限必要なバス終端抵抗100Ω よりも大きな値となります。図16 に電源ノードであるノード1 でのバス波形を示します。

図16. 電源ノードであるノード1 のバス波形
まとめ
このアプリケーション・ノートでは、ホーム・バス・システムに適した「AC 阻止」インダクタを選択する際の基準を概説しています。「結合インダクタ」、または「インダクタ・ペア」として構成された2 個の個別インダクタを用いることが推奨されます。このアプリケーション・ノートで述べられている規格や方法を用い、実際のアプリケーション条件に基づいて、ベンチ上で「AC 阻止」インダクタの選択を適格化することが重要です。
ホーム・バス・アプリケーションに適したインダクタを選択する場合の支援となるよう、いくつかの例とベンチ測定結果も示されています。
参考資料
MAX22088 データシートおよびMAX22088 評価用キット
MAX22288 データシートおよびMAX22288 評価用キット
ホーム・バスの概要、Introduction to Home Bus | アナログ・デバイセズ
インダクタ・メーカー:
- Würth Electronics, Inc.、www.we-online.com
- スミダコーポレーション株式会社、https://www.sumida.com