AN-1048: AD7150 On-Chip Noise Filter
Introduction
This application note describes the functionality of the on-chip noise filter in the AD7150, which is not described in the AD7150 data sheet. It explains the function of the filter and the required register configuration. This application note is also applicable to derivative CDC products based on the AD7150 platform (such as the AD7150, AD7151, and AD7156).
Theory of Operation
The AD7150 measures capacitance between two electrodes and compares its measurement result with a threshold that can be either fixed or dynamically adjusted by the on-chip adaptive threshold algorithm engine.
If the input capacitance is altered and exceeds the threshold (for example, by the presence of a hand) an output flag is set indicating proximity.
In many applications the sensor electrodes connected to the capacitive input of the AD7150 could be exposed to an electrically noisy environment. Therefore, the sensor electrodes could function like an antenna and pick up unwanted noise signals from its surroundings.
When an application requires high sensitivity in a system, the on-chip noise filter of the AD7150 can provide filtering which prevents unwanted triggers on the output caused by sporadically occurring noise signals on the capacitive input.
On-Chip Noise Filter
The on-chip noise filter in the AD7150 uses a moving average, in conjunction with an average history to minimize the effect of sporadically occurring spikes on the capacitive input and to determine the trend of the data.
The moving average of the on-chip noise filter is referred to as digital filter average (DF average) in this application note to distinguish it from the data average of the adaptive threshold algorithm engine described in the AD7150 data sheet.
The DF average is calculated from the current conversion result and the three previous conversion results; it effectively functions as a low-pass filter.
The average history indicates whether the current DF average and previous DF average have been monotonically decreasing for the negative threshold or increasing for the positive threshold. The depth of the average history can be set in the Configuration2 register as shown in Table 1 and Table 2.
| Bit | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
| Mnemonic | NFilt1 | NFilt0 | – | – | – | |||
| Default | 0 | 0 | 0 | 0 | 0x0 |
| NFilt1 | NFilt0 | Description |
| 0 | 0 | Noise filter is disabled. |
| 0 | 1 | Output flag is set when the DF average crosses threshold and the average history is monotonic for one previous DF average value. |
| 1 | 0 | Output flag is set when the DF average crosses threshold and the average history is monotonic for the two previous DF average values. |
| 1 | 1 | Output flag is set when the DF average crosses threshold and the average history is monotonic for the three previous DF average values. |
The register bits that control the on-chip noise filter are located in the Configuration2 Register at Register Address 0x1A.
On-Chip Noise Filter Performance Example
Test Setup
A standard AD7150 evaluation board with its on board capacitive sensors for proximity demonstration was used to evaluate the performance of the on-chip noise filter. A function generator was used to generate the noise signal. The noise signal was coupled into the CIN signal path of Demo Sensor1 via a dc decoupling capacitance.
Test Result
Figure 1 shows the functionality of the AD7150 with the on-chip noise filter enabled. As a hand approaches the proximity sensor, the data line (grey) decreases, due to the change in the capacitive input signal. The DF average (dark blue) which derives from the input signal follows the data line closely. The low-pass filter function of the DF average can result in a slight delay of a few conversion cycles as shown in the Figure 1. When the DF average crosses the threshold (orange) and the average history is monotonic, the output flag (light blue) is set high, indicating proximity. If the on-chip noise filter is not enabled the output flag (light blue) is set when the data crosses the threshold. When the threshold is crossed in the other direction, the output flag is set low.
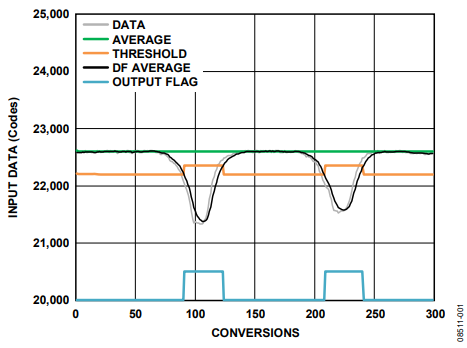
Figure 1. AD7150 On-Chip Digital Filter Without Induced Noise Signal.
Figure 2 shows data input with the induced noise signal. The input data contains the result of two movements towards the sensor element. The first movement is after 450 conversion cycles and the second after 600 conversion cycles. The induced noise signal causes changes on the data input, large enough to cross the threshold. This causes the output flag to toggle. Therefore, it is hard to distinguish the two movements from the induced noise signal. The first movement, starting just after 450 conversion cycles, might be detectable with post processing of the output signal as the output flag is set high for some consecutive conversion cycles. However, the second movement, starting just after 600 conversion cycles, is not detectable by post processing the output signal.
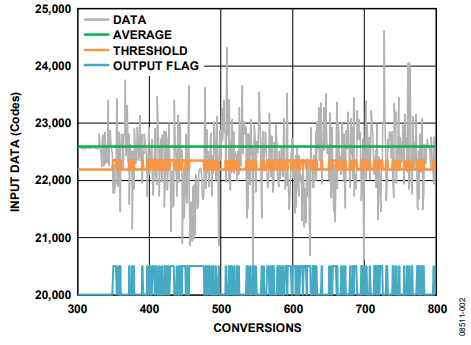
Figure 2. AD7150 On-Chip Digital Noise Filter Disabled.
Using the same capacitive input signal, Figure 3 shows that the DF average on its own reduces crossings of the threshold significantly. As the graph indicates, the unwanted setting of the output flag is significantly reduced and the two movements are detectable.

Figure 3. AD7150 On-Chip Digital Noise Filter Enabled.
Note that noise is a random signal, which can create conditions on the capacitive input that look like a valid signal. The on-chip noise filter minimizes the instance at which a threshold crossing causes the output flag to be set high. This allows for a simplified method of post processing the output signal.