How to Effectively Design and Optimize the TIA Interfaces of LIDAR Systems
How to Effectively Design and Optimize the TIA Interfaces of LIDAR Systems
2021-08-01
Introduction
In this article, we will address the effects of various input coupling options for transimpedance amplifiers (TIAs) and shed light on easily overlooked consequences for each case. The intent is to help engineers effectively design and optimize the TIA interfaces of a LIDAR system. We will highlight the design challenges when coupling a high gain optical detector to the TIA input.
LIDAR input is not a trivial topic, and there are going to be many moving parts in this process. The signal chain is going to be different depending on which design you choose, so it’s important to consider all of your options before choosing the one that is best for your project.
LIDAR and You
Time of flight LIDAR receiver signal chains have a slew of design trade-offs that can potentially compromise the performance of your imaging system. The interface between the TIA and its detector is part of this challenge. This is especially true for transimpedance amplifiers with multichannel switching.
LIDAR Receiver Building Blocks
A time of flight LIDAR system is composed of a transmitting signal chain and a receiving signal chain. The transmitting portion sends a pulse of photons at an object, and the receiving portion measures the amplitude and nature of that pulse. The amount of time it takes for the light to travel from transmission to detection tells you how far the light has traveled. At the most fundamental level, the receiving signal chain consists of a photodetector, a TIA, and an analog-to-digital converter (ADC), as seen in Figure 1. For multichannel applications, a multiplexer is used to reduce the number of ADCs. When photons strike the photodetector, it generates a current that is converted to a voltage by the TIA. This voltage is then quantized to a digital value by an ADC. Another popular choice for a quantizer is with a comparator and time-to-digits converter (TDC), as shown in Figure 2. These TDC systems have an order of magnitude less cost and power while trading off lower system performance. Also, the use of a multiplexer is typically not used with TDC but can be implemented to reduce the number of TDCs and comparators.


Figure 1. LIDAR receiver signal chain quantized by an ADC.


Figure 2. LIDAR receiver signal chain quantized by a TDC.
There are three dominate type of detectors. Photodiodes are detectors that convert photons to electrons, but they offer no optical gain and are not a popular choice for these applications. A popular detector in LIDAR systems is the avalanche photodiode (APD). APDs are photodiodes that are reverse biased up to breakdown of the junctions with the benefit of gaining optical gain. The third type of detectors are single photon avalanche diodes (SPADs). A SPAD is reverse biased with an excess bias voltage that is between the breakdown voltage and the second, higher breakdown voltage associated with the SPAD’s guard ring. At this bias, a single charge carrier injected into the depletion layer can trigger a self-sustaining avalanche, resulting in thousands of virtual gain at the detector. It would seem the SPADs would be the natural choice due to their sensitivity. However, LIDAR systems must contend with many real-world consequences and too much gain will saturate the receive chain too easily. Also, the extra gain comes with extra noise, called the excessive noise factor (ENF). The ENF is exponentially correlated to the bias, and too much gain can give a worse signal-to-noise ratio (SNR) to the detector. Luckily, APDs are a happy medium, offering enough optical gain for this space, but not too much ENF to negatively impact the SNR.
When a photon strikes the APD, an electron hole pair is created at the junction. The APD’s high electric field acts like a slingshot and accelerates the electron to knock off more electrons. This increases the number of released electrons per received photon. This effect is called the avalanche effect and it adds a multiplication factor (M factor). This gain, which is bias dependent, can allow us to see weaker signals since the TIAs are generally the limiting factor for SNR due to its noise floor. The goal is to match the noise floor of the next stage in the signal chain. In this case, match the TIA’s noise floor by providing enough gain in the APD to slightly dominate the signal chain noise to give the best SNR to the system. This noise matching concept is widely used in many signal chains where the sensor noise floor is not the limiting factor. In practice, this increase in receiver performance translates to an extended detection range. Another important advantage of APDs is a fast saturation recovery. Again, the TIA is the limiting factor in this and LIDAR specific TIAs are designed to reduce the saturation times to avoid blinding the LIDAR system. The only downside of APDs is their relatively high bias point (hundreds of volts) and the temperature coefficient associated with it.
LIDAR has unique requirements for TIAs. Low current noise and high bandwidths are typical for all optics applications. However, low power is a necessity. A system’s power budget may come under strain very quickly since current systems have 64 or more TIA APD channels. As such, lower power modes are necessary when the TIA is not in use. Also, these devices need to wake up quickly to optimize their power budget. Another requirement for modern LIDAR TIAs is clamping circuits for saturation events and to balance and trade-off input referred noise and bandwidths. One major difference between the normal optical signal chain and LIDAR is the environment. In fiber applications, the system is enclosed and is very stable. However, in LIDAR we have the sun to contend with, as well as other LIDAR systems. The sun could cause a DC input that saturates the receive chain linear range. This is one of the first challenges engineers will have to overcome for designing these systems. Unfortunately, the solution is not easy and will be addressed by this article.
Input AC-Coupling Considerations
Let’s explore a simple approach to block the DC signal and one that many engineers try to implement without much success: connecting an AC-coupling capacitor between the APD to the TIA. By placing a capacitor, we can mitigate DC effects, but this introduces a new set of challenges.
RC Trade-Offs
Firstly, adding an AC-coupling capacitor to the input of the TIA input also requires connecting a DC path to the detector. By placing a resistor, RB, the APD’s bias point can be set, allowing you to AC couple the TIA input with CIN, as shown in Figure 3. One sacrifice you make with this bias path is it creates a parallel path for the APD current to flow through. This parallel path will negatively impact the gain of the APD since its signal will be shared. The magnitude of this APD gain degradation is determined by the ratio between the TIA input impedance and the value chosen for RB. Additionally, CIN has an impact on the circuit when the input is subjected to currents from the APD, a voltage is produced on the capacitor. This effect is due to the integrating current nature of capacitors, where the voltage is a function of current over time and capacitance value. The goal is to make CIN small enough to minimize charging effects but large enough to allow it (to have low enough impedance) to pass signals at the frequency of interest. In other words, if CIN is too large, then it takes longer to discharge, but if CIN is too small, you will lose some of your signal as a voltage drop across it (or distortion if the pulses have a long relative timescale to the capacitance). Any of these effects will severely compromise the signal chain.

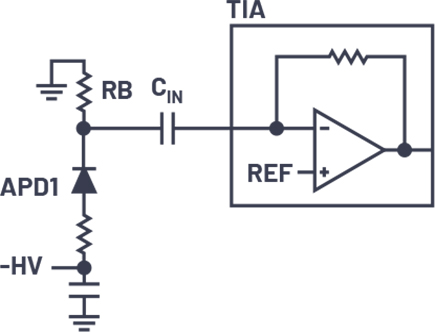
Figure 3. RB is needed to AC couple the TIA.
Sizing RB and CIN
Let’s illustrate how sizing CIN too small hurts your full-scale measurement: at 200 MHz, a 33 pF capacitor looks like 24 Ω, which creates a voltage divider with RIN (usually on the order of a few hundreds of ohms for LIDAR TIAs), taking 10% off the signal’s actual value. A 10% hit to your signal can easily wipe out the hard engineering work done to optimize other areas such as the optics design. The pitfall with this AC-coupling approach to cancel DC becomes clear when sizing RB. RB should be large in comparison to the TIA input impedance to prevent gain degradation, but small enough not to compromise the saturation recovery. An impossible balance of choosing RC time constants is compounded by the fact that the input signal of the detector is unipolar. The square wave nature of the input pulse is averaged on this RC and will remove the TIA’s dynamic range. Additionally, the TIA can potentially charge CIN when channel switching or by using output multiplexing. For example, with the LTC6561, the input of the TIA of an active channel is nominally 1.5 V. When the channel is inactive, the voltage of the input drops to 0.9 V. When an AC-coupling capacitor is inserted in between the detector and the TIA’s input, the capacitor must recharge back to 1.5 V for the channel to become active again. Figure 4 illustrates a multichannel system performance degradation of channel switching vs. input coupling capacitor. Note that output multiplexing time (OMUX) is affected similarly to channel switching since internally it disables the input in the same manner. The recharging time will be compounded by the first stage RT resistor, which is usually on the order of tens of kilo-ohms since the control loop is broken in this situation. A similar effect occurs in TIAs that shutdown the input stage in shutdown mode to save on power. The inputs must also be recharged to their operating points and will have long time constants to power up.

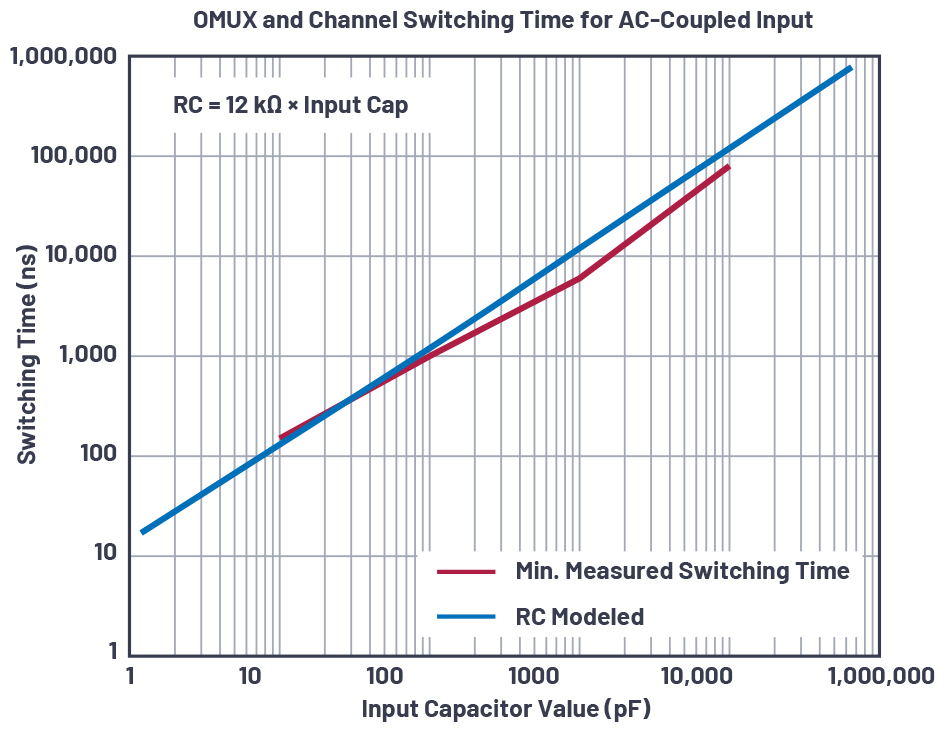
Figure 4. Plot of OMUX and channel switching time due to AC-coupled input. RB = 12 kΩ.
TIA Saturation Considerations
Digging ourselves deeper in this hole, saturation recovery will be the final nail in the coffin. Figure 5 shows the output when CIN is exposed to high input currents. The effect of a 10 mA pulse to an AC-coupled TIA, where RB is 2.2 kΩ, and CIN is 100 pF, clearly shows two different regions of operation after the high current pulsed event. After a 10 mA input pulse of 5 ns, the AC capacitor has been heavily charged and the output of the TIAs output rails to ground. This output saturation to the ground is a symptom of the input being pulled far from its nominal 1.5 V and is a function of the detector’s current magnitude and duration. The higher the pulsed current, the longer the output is saturated, pulling to ground. The second region of operation is the recovering state. This recovery state time constant is correlated to RB and CIN.


Figure 5. High input current saturation with CIN = 100 pF, RB = 2.2 kΩ.
Figure 6a and Figure 6b shows the two mechanisms under different conditions and they provide more visual insights. The total recovery time is the sum of the railed and recovery times for the AC-coupled input TIA. It may be tempting to use a small resistor value for RB to reduce the recovery time, but remember that RB is also a parallel path for the detector and steals some of the input currents— this stolen current translates to the reduction of the overall gain of the APD. Unfortunately, since LIDAR is expected to run in the real world, it is possible to see large pulses of light from other systems and cause tens of microseconds of saturation recovery from nanosecond laser pulses.


Figure 6. (a) Railed time recovery for various RB values. (b) Recovering rise-time recovery for various RB values.
Input DC-Coupling Considerations
A DC-coupled input is straightforward. At a high level, the DC-coupled input shown in Figure 7 allows the TIA to recover quickly from saturation and is limited only by the TIA’s saturation recovery. The disadvantage of this approach is that it will allow DC to pass from the APD to the TIA input. Unfortunately, ambient light, dark currents, and leakage caused by the detector can use some or most of the TIA’s input linear range. This reduced dynamic range essentially reduces the receive chains SNR. With enough ambient light, the TIAs dynamic range is severely reduced to zero dynamic range, blinding the system.


Figure 7. DC-coupled TIA input.
The most commonly used methods to reduce ambient light often involve optical filtering, like that shown in Figure 8 or the use of active circuits to remove the offset shown in Figure 9. Optical band-pass filters can be coated directly on the APD window or on the lens. On a high level, optical band-pass filters will reduce the effects of ambient light. The optical filter does not help with reflections from the internal optics, which can cause a large, unwanted signal. However, it is a good first line of defense. An active DC cancellation circuit injects an opposite current into the input of the TIA to counteract the input DC components. This scheme requires a closed loop from the TIA output to its input and great care is needed to preserve the noise and the switching performance of the TIA. Since we are looking at TIA gains of 10k to 100k, loop stability is also challenging. Circuit techniques and architectures for this will not be covered in this article. The big takeaway here is once the stability and input capacitance are mitigated in the circuit, the DC cancellation gives the best performance for saturation recovery. However, this comes at the price of added cost and complexity.

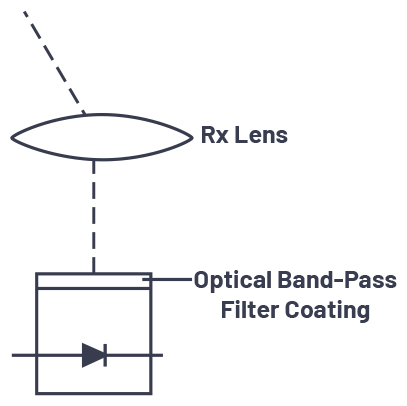
Figure 8. Optical band-pass filter for removing most ambient light.

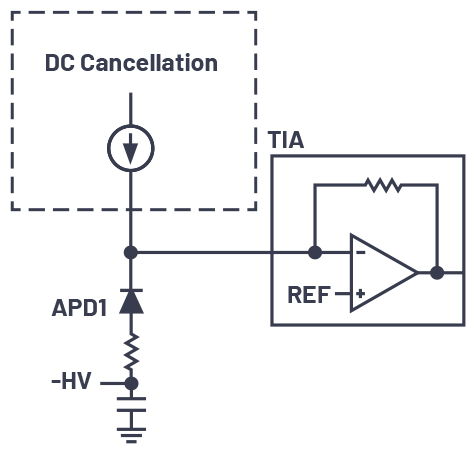
Figure 9. DC cancellation scheme.
Mutually Exclusive Design Choices
There are many trade-offs when considering AC vs. DC coupling or current cancelling a TIA input for LIDAR. The ideal characteristics of a multiplexed LIDAR receiving analog front end would be that it has a high dynamic range, recovers quickly, rejects ambient light, and dissipates little power with unlimited bandwidth. The reality is that some of these qualities have mutually exclusive design considerations.
| Input Coupling | DC | AC | DC with current cancellation |
| Advantages | Fast saturation recovery | Maximum dynamic range even with ambient light and ADP leakage | Maximum dynamic range even with ambient light and ADP leakage |
| Fast channel switching | Fast saturation recovery | ||
| Simple to design | Fast channel switching | ||
| Disadvantages | Dynamic range loss from ambient light and ADP leakage | Several design considerations | Complex circuit that needs careful considerations |
| Slow saturation recovery |
AC Coupling vs. DC Coupling
If you choose AC coupling, your dynamic range is increased at the cost of recovery time when saturated. AC coupling makes sense for applications that can tolerate 10s of microseconds of recovery time for the TIA. If DC coupling is selected, the recovery rate is much faster at the cost of some or all of your dynamic range being lost from DC effects. DC coupling makes sense in applications that require fast recovery and are not as sensitive to DC effects that may inhibit dynamic range. If DC coupling with integrated current cancellation is the chosen topology, your dynamic range is increased, saturation recovery speed and channel switching are faster with the requirement of additional design complexity. This topology is a requirement for automotive LIDAR since the need for fast recovery and more dynamic range are justified for the extra design and costs.
Simply adding an AC-coupling capacitor to the input of the transimpedance amplifier in a pulsed application can harm the performance of your system. However, trade-offs can be made to achieve realistic goals depending on your needs. Not all systems require the best recovery times (for example, industrial and instrumentation systems), and AC coupling can be applied to these circuits. In the cases where the TIA struggles to recover when the input is AC coupled, it is convenient to blame the TIA. However, even with an ideal TIA model with zero recovery time, the recovery time would still be compromised when the AC capacitor is added. This may be a scenario where it might make sense to consider adding DC-coupled or DC-coupled with DC cancellation circuitry.
Summary
LIDAR input is not a trivial topic, and there are going to be many moving parts in the design process. The signal chain is going to be different depending on which design you choose, so it’s important to consider all your options before choosing the one that is best for your project.
关于作者
Noe Quintero started as an applications engineer at Analog Devices in 2015 and became an analog design engineer in 2019. He has a B.S. in electrical engineering from San Jose State University and he specializes in signal
关联至此文章
产品
行业解决方案
产品分类
























