Elusive Tones: Aliasing Effects in Digital MEMS Accelerometers in Condition Monitoring
Elusive Tones: Aliasing Effects in Digital MEMS Accelerometers in Condition Monitoring
2017-02-01
MEMS accelerometers are attractive candidates for vibration-based condition monitoring of industrial machinery, on account of their low cost, weight, power, and ease of use, as compared to incumbent piezoelectric accelerometers. These features allow equipment manufacturers to embed multiple MEMS accelerometers to detect vibration signals in various parts of the machinery, subsequently diagnose abnormalities and incipient failures by identifying vibration patterns that deviate from normal. While the patterns are unique to different machines and mounting locations for the sensors, the technique broadly relies upon gleaning information from the frequency spectrum of vibrations sensed by the accelerometers, and monitor for shift in frequencies of vibration tones, onset of harmonics, and change in broadband vibration amplitude, in particular, frequency bands (1).
When using an accelerometer with digital output, designers must take into account the bandwidth limitations imposed by the digital filters in the signal chain, and also be wary of aliasing of high frequency signals into the bandwidth of the sensor for a given output data (sampling) rate. For a sampling rate S, a vibration signal at frequency f (where f < S/2) is indistinguishable from a signal at higher frequency S/2 + f, due to folding. In condition monitoring applications, this could lead to misinterpretation of the vibration profile of the machinery.
As an example, consider the ADXL355 and ADXL354, accelerometers that are targeted for high resolution vibration measurement with very low noise to enable the early detection of structural defects via wireless sensor networks. The internal digital filters in the ADXL355 will cause aliasing of out of band frequency, content to frequencies within the bandwidth of the accelerometer. For operation at 4 kHz ODR, for example, a bandwidth of 1 kHz frequencies above the Nyquist rate (2 kHz) will experience aliasing. This is particularly important for frequencies above 3 kHz, which will be aliased to frequencies within the bandwidth of the accelerometer (1 kHz), thereby causing an erroneous interpretation of the output. A combination of the filter and the sensor resonance results in an attenuation of ~25 dB for the 3 kHz signal aliased to 1 kHz, as seen in Figure 1. The dynamic range of the accelerometer with noise density N = 25 μg/√Hz and bandwidth BW = 1 kHz, considering R = ±8 g measurement range is:

{kind=link}
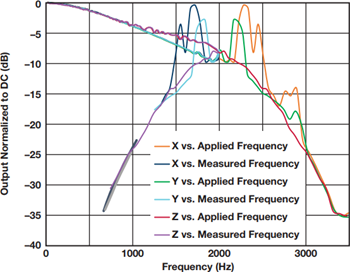
Figure 1. ADXL355 output aliasing vs. frequency due to digital filtering.
The attenuation for all frequencies between 3 kHz and 3.9 kHz is less than the dynamic range and thus the aliased signal will be larger than the accelerometer noise floor. For applications where smaller bandwidth is acceptable, the ADXL355 could be used by digitally filtering the output to limit the bandwidth to lower frequencies, such that the attenuation of the aliased signal is higher than the dynamic range required in the application. If the application requires monitoring of vibration tones of amplitude above a certain threshold, such that the dynamic range required is 30 dB (±8 g to ±8 mg), the bandwidth can be limited to 750 Hz by using a digital filter (for example, 4th order Butterworth filter) at the output. If the attenuation requirement in the application for aliased signals is larger than the actual response in the ADXL355, it is recommended that the ADXL354 be used instead. Since the ADXL354 does not possess any internal digital filters, it does not exhibit aliasing.
关于作者
























