Addressing Power Supply Challenges for After-Market Electronics and Infrastructure
要約
Industrial transportation electronics includes after-market additions for automation and entertainment in cars, trucks, trains, planes, and ships, as well as infrastructure automation for roads, sea-lanes, trains, and air traffic control. This application note discusses key market trends and customer needs that are presenting new challenges for power supply design for after-market technologies and transport infrastructure automation. This piece will also examine solutions to address these challenges, with a special emphasis on power architecture.A similar version of this application note originally appeared on Electronics for U on April 17, 2018.
Introduction
After-market automotive products have driven remarkable innovation, from infotainment and telematics to advanced driver assistance systems (ADAS). Features like GPS, rear-view cameras, and parking sensors are now common in vehicles. There is also a continuous rollout of novel after-market technologies being developed by companies worldwide. Fleet management, on-board diagnostics, heads-up display, and freight control/monitoring are just a few examples of technologies found in cars and trucks, trains, ships, avionics, and defense applications.
Transport infrastructure automation to move people and goods more efficiently includes HOV lane control, parking/toll, fare meters, traffic control, and others. Many other innovations have made faster movement, on-time schedules, and fewer accidents possible.
Industrial Transportation Market Trends
Fleet management and logistics represents one of the most dynamic applications in industrial transportation. Tracking goods that are manufactured and shipped from various regions, states, countries or even overseas is a big business. Consider, for example, perishables. Produce and other foods must be kept under regulated temperature, pressure, or other parameters as they are transported. Similarly, secure goods require sensors to track location and entry access. Driver safety is also essential, requiring data from cameras that monitor driver alertness and GPS systems that track vehicle location. This data is logged using wireless networks and cloud infrastructure, and complex algorithms synthesize the data to make real-time decisions on route and/or for driver safety. Several GPS navigation companies have entered the fleet management market, providing hardware and software products and services.
For infotainment, some might feel that there is not much room for innovation given the standard features already available. Yet, automotive designers are creating more than simple smartphone interfaces, bringing to vehicles advancements such as heads-up display (HUD) that projects the phone screen onto the windshield glass with gesture control to navigate between maps and video calls, or other salient features like weather, stock ticker, and calendar. Another active product development area involves seat-back screens to mirror the phone screen for rear passengers.
ADAS applications are quickly becoming standard features in vehicles. Lighting, parking sensors, traffic warnings, rear-/extended-view cameras, and car-to-car (vehicle-to-vehicle) interface are among the after-market ADAS functions available. Several manufacturers are working on solutions to help drivers avoid unintended lane departures, collisions, pedestrians, and road hazards as well as to drive within the speed limit.
In busy urban areas, people spend so much time in cars that we are seeing wireless gateways in many cars as well as buses. This capability allows passengers to be productive during their long commutes.
Typical System Architecture
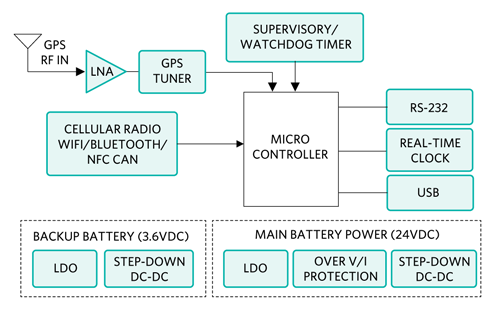
Figure 1. Typical fleet-tracking/management system architecture.
Power Architecture for Fleet-Tracking Devices
The vehicle battery, typically 12V in cars and 24V in many trucks, powers the fleet-tracking/management device. The device, as an after-market add-on versus a well-bounded OEM version, faces a much harsher power management environment. Most of these devices also have a rechargeable backup battery, typically 3.6V, that lasts two or three days when the main battery power is lost. From the main battery source, the front-end electronics are protected against transient and fault conditions. To power various digital logic and analog ICs, step-down DC-DC converters and LDOs convert the protected voltage into useable, lower voltages (i.e., 3.3V, 2.5V, 1.2V).
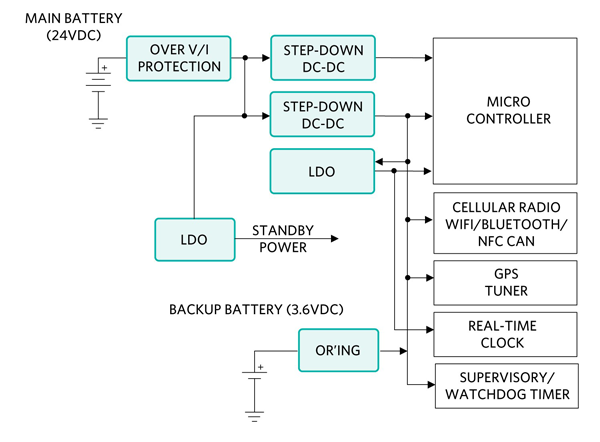
Figure 2. Typical fleet-tracking/management power architecture.
Fault Protection
Like many other electronics that draw power from a vehicle battery, the fleet-tracking/management device must be protected from voltage surges stemming from load dump, regenerative braking, long cable ringing, and other such events.
Load dump occurs when the battery cable is suddenly disconnected while the alternator is spinning. This event places high energy back onto the vehicle power cable where there is nothing to absorb it, causing high voltages that could destroy unprotected electronics.
In regenerative braking, when an electric vehicle driver applies the brake, the motor captures the vehicle’s kinetic energy and sends it back to charge the battery. Because of the high-energy, high di/dt nature of regenerative braking, there is high voltage ringing associated with this event. Long cable ringing occurs when there is a high di/dt event, such as when a device is plugged in to an on-board diagnostic connector. The surge current charging the device’s on-board capacitors or backup battery resonates with the cable’s inductance and causes high voltage ringing. Longer cables, with higher parasitic inductance, exhibit more severe voltage ringing. The new OBD-II standard dictates that the diagnostic connector be within two feet (0.61m) of the steering wheel while the main battery is far away under the hood or on a side of a truck. A drawback of this requirement is that it makes the cable from the battery to the OBD-II connector longer and, thus, more prone to high voltage ringing.
High Voltage Faults from Cable Ringing
Figure 3 demonstrates cable ringing in a lab setup. A 24VDC power source emulates a 24VDC battery from a truck. A 10-foot cable connects the power source to a ceramic capacitor (either 1µF or 10µF) to emulate an input capacitance of a fleet-tracking device.
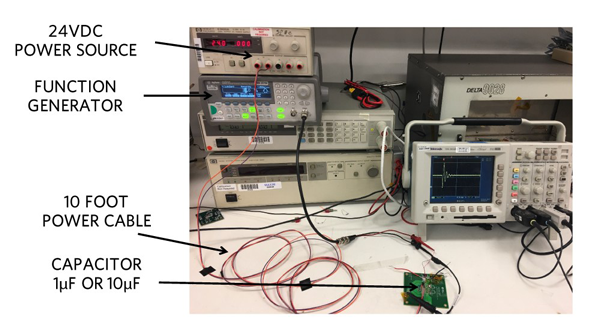
Figure 3. Cable ringing test setup.
Figure 4 shows the first test for emulating cable ringing at the initial plug-in when the in-rush current, which is charging the previously discharged capacitor and is built up through the cable parasitic inductance, resonates with the board input capacitance. With 10µF input capacitance, the peak ringing voltage is 32V with a voltage spike at 42.6V. With 1µF input capacitance, the peak ringing voltage is at 40V.
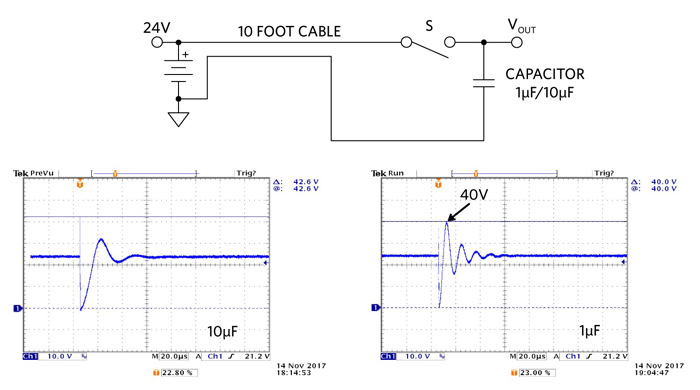
Figure 4. Cable ringing at initial plug-in.
Figure 5 shows the second test for emulating a brief short-circuit condition across the cable. Once the short is removed, the short-circuit current built up through the cable parasitic inductance resonates with the board input capacitance. With 10µF input capacitance, the peak ringing voltage is 40V. With 1µF input capacitance, the peak ringing voltage is at 50.4V, which more than doubles the source voltage of 24V.
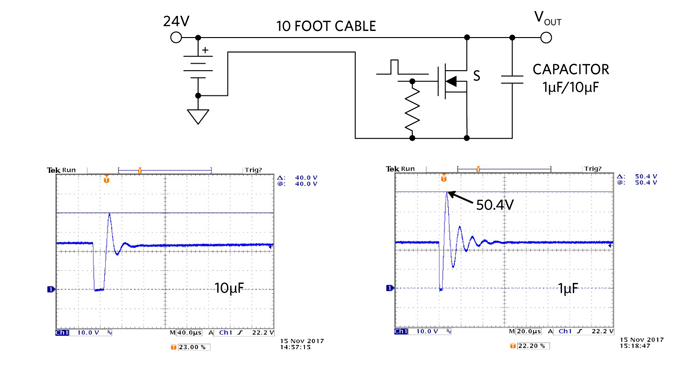
Figure 5. Cable ringing after a brief short-circuit condition.
This experiment uses 10 feet of cable, an amount that represents a reasonable estimation of the truck cable length from its battery to an OBD-II connector to demonstrate that the peak ringing voltage can easily double the input voltage source. The high peak ringing voltage can occur at different cable lengths and at different device input capacitance. In fact, peak ringing voltage can be calculated as follows:

where IPK is the peak short circuit current and  is the characteristic impedance of the system. L in this case is the cable parasitic inductance and C is the device input capacitance.
is the characteristic impedance of the system. L in this case is the cable parasitic inductance and C is the device input capacitance.
Other Faults to Consider
Since electronic components can encounter short-circuit faults, short-circuit and/or overcurrent protection circuitry is essential for preventing fire hazards as well as isolating the power cable from a failed short device. When the ambient temperature becomes excessive or when some other fault (i.e., overcurrent) is present, the over-temperature protection prevents permanent damage by either scaling down the power dissipation or shutting down the device completely. Over-temperature protection prevents system overheating and fire hazards and ensures that the system operates within its defined temperature limits. Connecting the battery in reverse or installing the power cable backwards could trigger a reverse voltage fault. While unlikely to happen, a reverse voltage fault, without proper reverse voltage protection, usually produces expensive damage to the power cables and electronic devices connected to the cable.
We have discussed the need to protect the device from many possible faults. Implementing fault protection circuits with discrete components can be quite tedious, expensive, and not fool-proof. The solution is large because of the high number of components, and the onus is on the system designer to verify and guarantee the circuit performance over time. Total cost of ownership is high as well, given the system inflexibility when responding to a fault (open a switch, shut down the system, and then have a technician restart the system).
Figure 6 illustrates a modern protection IC from Maxim®’s Olympus family of devices, MAX17523 (36V/1A). This highly integrated IC packs all the needed protections into a single, tiny 16-pin TQFN 3×3mm package. This device is very simple to use while providing a rugged solution for 12V transportation electronics. The MAX17523 provides the following features:
- High input voltage tolerance (+4.5V to +36V operating range)
- Reverse voltage protection (tolerates -36V negative input voltage)
- Reverse current protection
- Short circuit, over-current protection
- Over-temperature protection
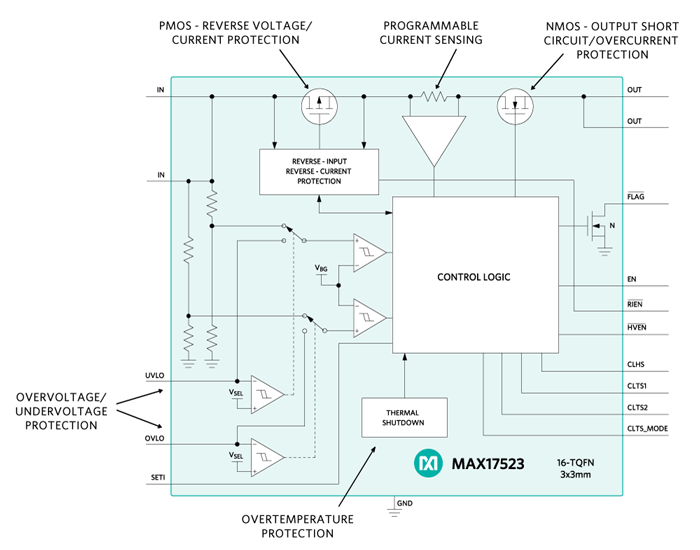
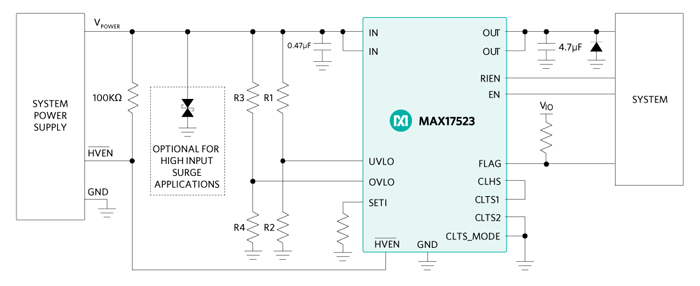
Figure 6. MAX17523 typical application schematic.
For 24V transportation systems, a higher voltage rating protection IC is needed. The MAX17525 (+5.5V to +60V, 0.6A to 6A) from Maxim’s Olympus protection IC family is ideal here. The device is in a space-saving 20-TQFN 5×5mm package. The MAX17525 provides the following features:
- High input voltage tolerance (+5.5V to +60V operating range)
- Reverse voltage/current protection (tolerates -60V negative input voltage)
- Short-circuit, thermal foldback current-limit protection
- Over-temperature protection
- Adjustable OVLO, UVLO, startup current, and forward current limit
Addressing Space Constraints with Modern DC-DC Regulators
Like many other transportation electronics, the fleet-tracking/management device is physically small. It is a challenge to remove the heat dissipation from the device to keep its temperature within range. Fitting the power circuit into a small space requires a high level of integration. Modern DC-DC power solutions that effectively integrate the power MOSFETs, compensation circuit, and other external components help reduce the circuit size. Combining the small solution size with the efficient synchronous rectification technology helps reduce the power dissipation. The MAX15062 (4.5V-60V, 300mA) from Maxim’s Himalaya family is an example of such a device, providing 92% peak efficiency in a tiny 8-TDFN 2×2mm package.
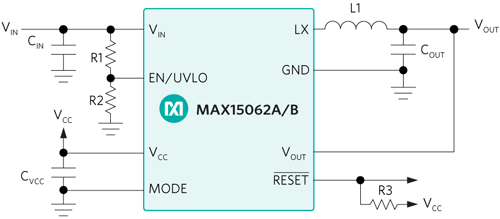
Figure 7. MAX15062 typical application schematic.
To further increase integration, Himalaya power modules also include a power inductor, resistors, and capacitors with a DC-DC regulator. For the designers, the modules are easy to use and easy to design, enabling fast time to market while requiring only an input capacitor, an output capacitor, two small voltage-setting resistors, and an optional soft-start setting capacitor for a complete power solution. The MAXM17545(4.5V to 42V, 1.7A) and the MAXM17575 (4.5V to 60V, 1.5A) are good examples of Himalaya power modules.
Today’s automobiles and intelligent transport automation applications boast hundreds of sensors. In these applications, the sensors are being added to equipment with extreme space constraints. Powering sensors requires even higher integration. The advanced packaging technology used in the MAXM17532 miniaturizes a 42V, 100mA power solution into a 2.6×3×1.5mm uSLIC™ power module. This highly efficient synchronous DC-DC buck power module also minimizes the heat dissipation in the sensor.
- 4.0V to 42V VIN range
- 0.9V to 5.5V VOUT range
- 100mA continuous current
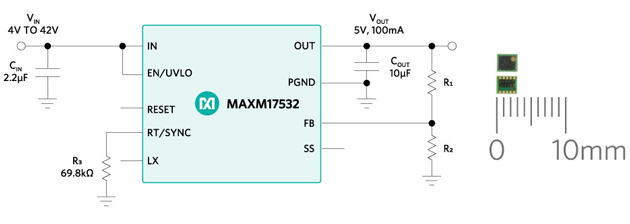
Figure 8. MAXM17532 typical application schematic.
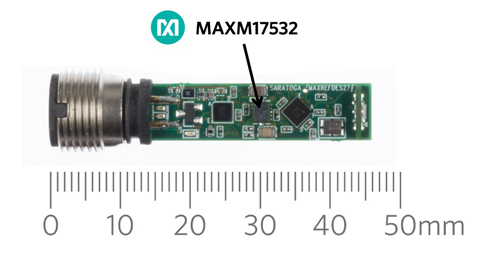
Figure 9. MAXM17532 uSLIC power module in a tiny proximity sensor.
One might say: I can power the sensor using an LDO! Yes, this is true since the LDO is generally low cost and simple to use, but it has high power dissipation, which is a key disadvantage.
For example, a traditional simple digital/analog sensor might need 5V at 20mA and has 24V input (nominal). The power dissipation across the LDO is (24V – 5V) × 20mA = 0.38W (nominal). Newer sensors are packed with more intelligence, more functionality, and more flexibility. All these characteristics mean more power, say 100mA. Keeping the same input/output voltages, the power dissipation across the LDO is (24V – 5V) × 100mA = 1.9W. This significantly higher power dissipation must be dissipated in the same sensor’s physical form factor. On top of this, many more circuitries are being added to the sensor, requiring smaller size and higher integration.
Maxim’s Himalaya’s uSLIC power module addresses both size and power dissipation requirements. At 24V input, 5V/100mA output, and 85% efficiency, the power dissipation in the MAXM17532 is (5V × 100mA) × (1/85% - 1) = 0.09W, or a mere 5% of 1.9W that would be dissipated in an LDO. Low power dissipation means lower system operating temperature and higher long-term reliability.
Summary
The growing after-market transportation electronics industry covers both in-vehicle systems and transport infrastructure. Equipment serving this market must be robust against transient conditions such as overvoltage, overcurrent, reverse voltage, reverse current, and over temperature. Highly integrated protection ICs guard against these conditions, simplifying the design compared to using discrete solutions. These types of equipment are also getting smaller while still providing a lot of functionality. This calls for higher integration, such as what is available in highly efficient power management solutions that mitigate thermal dissipation while enhancing long-term system reliability.

















