産業用モーション・コントロールのための測定手法
産業用モーション・コントロールの用途は、インバータ・ベースのファン制御やポンプ制御から、より複雑なACドライブ制御によるファクトリー・オートメーション、さらには高度なサーボ制御を用いたロボット工学などの先進のオートメーション・アプリケーションに至るまで、幅広い範囲に及んでいます。これらのシステムには、モーター巻線の電流や電圧、DCリンクの電流や電圧、ローターの位置ならびに速度など、数多くの変数の検出とフィードバックが必要です。変数の選択と必要な測定精度は、エンド・アプリケーションの要求、システム・アーキテクチャ、ターゲット・システムのコスト、あるいはシステムの複雑さなどの他に、条件監視のような付加価値機能など、考慮すべきさまざまな事項によって異なります。世界中のエネルギーの40%を消費していると言われるモーターでは、産業用モーション・アプリケーションのあらゆる範囲にわたり、国際規則でシステム効率が重視されるようになっており、これらの変数、特に電流と電圧の重要性が増しています。
この記事では、モーターの出力定格、システム性能要求、エンド・アプリケーションなどに従って、さまざまなモーター制御シグナル・チェーン・トポロジにおける電流および電圧の検出に焦点を当てます。このような背景でのモーター制御シグナル・チェーンの実装は、センサーの選択、ガルバニック絶縁に関する要求、A/Dコンバータ(ADC)の選択、システム・インテグレーション、およびシステム電源とグラウンドの分割によって異なってきます。
産業用ドライブ・アプリケーションの種類
モーター制御アプリケーションは、シンプルなインバータから複雑なサーボ・ドライブまでさまざまですが、そのすべてに電力段を持つモーター制御システム、すなわち、さまざまなレベルで検出とフィードバックを行うパルス幅変調器(PWM)ブロックをドライブするプロセッサが含まれています。各種アプリケーションの概要を図1に示します。この図では、左から右へ進むにつれてより複雑なシステムとなっていますが、左端に示すポンプ、ファン、コンプレッサなどのシンプルな制御システムに高精度のフィードバックは必要なく、単純なマイクロプロセッサが使われます。図の右側へ進むにつれてシステムの複雑さが増し、複雑な制御システムでは高精度のフィードバックや高速の通信インターフェースが必要になります。これらの例としては、誘導モーターや永久磁石モーターのベクトル制御(センサーを使用するものと使用しないものの両方)や、効率を追求して設計された高出力の産業用ドライブなどが挙げられます。これらは、図1では大型のポンプ、ファン、コンプレッサとして示されています。ロボット工学、工作機械、ピック・アンド・プレース装置といった最もハイエンドなアプリケーションには、複雑なサーボ・ドライブが使われます。システムが複雑になるにしたがい、変数の検出とフィードバックがより重要になります。
{kind=link}
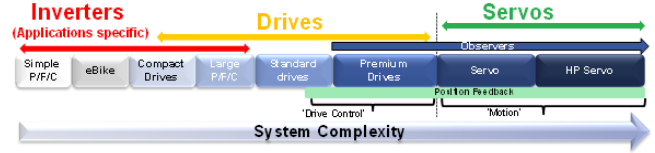
図1. 産業用ドライブ・アプリケーションの種類
ドライブ・アーキテクチャ - システムの分割
産業用モーション・コントロール分野のアプリケーションに対応したシステムを設計するにあたっては、多くの課題があります。一般的なモーター制御のシグナル・チェーンを図2に示します。
{kind=link}
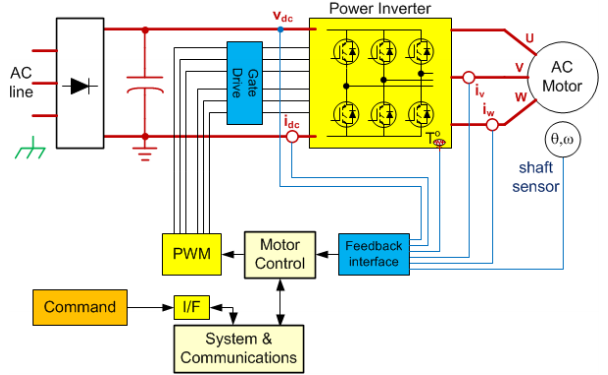
図2. 一般的なモーター制御シグナル・チェーン
絶縁に関する要求事項は重要な問題であり、これらは最終的な回路のトポロジとアーキテクチャに大きく影響します。考慮すべき重要な要素は、絶縁が必要な理由と絶縁すべき部分の2つです。
必要な絶縁の等級はその理由によって決まります。要求として考えられるのは、作業者の感電を防ぐ安全のための高電圧の絶縁(SELV)、あるいは致命的でない電圧の違いを均一化する機能的絶縁、もしくはデータ・インテグリティの確保やノイズ軽減のための絶縁です。絶縁すべき箇所は、多くの場合、予想されるシステム性能によって決定されます。モーター制御は電気的ノイズの多い厳しい環境で行われることが多く、一般にその設計には数百ボルトの大きな同相電圧が加わり、20kHzを超える周波数でスイッチングが行われて立ち上がり時の過渡的なdv/dtが非常に大きな値となることもあります。このような理由から、高性能システムや、高出力で基本的にノイズの大きいシステムは、通常、電力段と制御段を絶縁して設計されます。設計をシングル・プロセッサとするかデュアル・プロセッサとするかも、どの部分を絶縁するかに影響します。低性能かつ低出力のシステムでは、デジタル通信インターフェース部分で絶縁するのが一般的です。これは、電力段と制御段が同じ電位になることを意味します。ローエンド・システムでは、絶縁する通信インターフェースの帯域幅も狭くなります。
従来、ハイエンド・システムにおいて通信インターフェースを絶縁することは困難でした。これは、広帯域が求められることと、従来の絶縁技術に制約のあったことが理由でしたが、これは、アナログ・デバイセズが提供する製品例のように、磁気的に絶縁されたCANやRS-485トランシーバ製品が出現したことによって変りつつあります。アナログ・デバイセズの製品についてはwww.analog.com/jp/icouplerを参照してください。
高性能閉ループ・モーター制御設計における2つの重要な要素が、PWM変調器の出力とモーター位相電流のフィードバックです。図3aと3bは、制御段が電力段と同じ電位を共有しているか、あるいはグラウンド電位を基準にしているかに応じて、絶縁が必要な領域を示したものです。どちらの場合もハイサイド・ゲート・ドライバと電流検出ノードを絶縁する必要がありますが、絶縁の等級が異なります。図3aでこれらのノードに必要なのは機能的絶縁だけですが、図3bでは作業者の安全のためにこれらのノードを絶縁(つまりガルバニック絶縁)することが極めて重要です。
{kind=link}
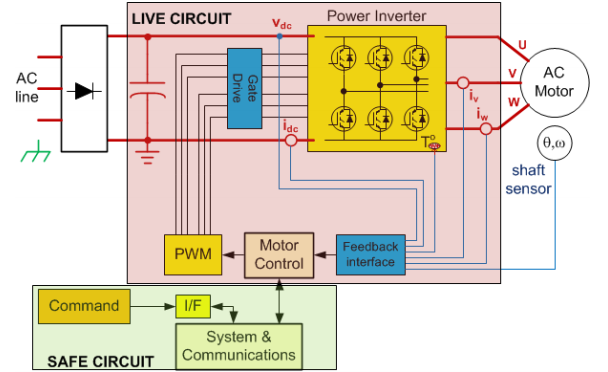
図3a. 電力段を基準とした制御段
{kind=link}
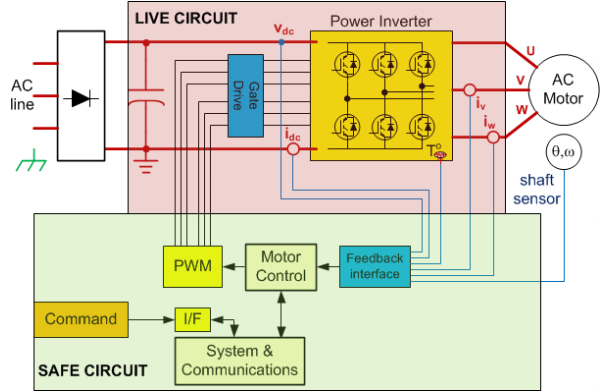
図3b. グラウンドを基準とした制御段
電流および電圧検出のための測定手法とトポロジ
電流および電圧を検出するためのシグナル・チェーン実装は、すでに述べたシステム電源とグラウンドの分割に加え、センサーの選択、ガルバニック絶縁に関する要求、ADCの選択、およびシステム・インテグレーションによって異なります。高忠実度の測定を実現するシグナル・コンディショニングは簡単ではありません。たとえば、ノイズが多い環境で小信号を復元したりデジタル信号を送信したりすることは困難であり、アナログ信号の絶縁にはさらに大きな問題が伴います。多くの場合、信号絶縁回路は、システムのダイナミック性能を制限する位相遅延を発生させます。位相電流の検出は特に困難です。これは、このノードが、電力段中心部(インバータ・ブロック)のゲート・ドライバ出力と同じ回路ノードに接続されていて、これにより絶縁電圧およびスイッチング過渡に関して全く同一の要求が適用されてしまうからです。モーター制御システム内に実装する測定シグナル・チェーン(手法、シグナル・コンディショニング、およびADC)は、主に3つの要素によって決定されます。
- システム内のポイントまたはノード: 何を測定する必要があるのかを決定します。
- モーターの電力レベルとそれに基づくセンサーの選択(基本的に絶縁されているセンサーか否か): センサーの選択は、コンバータのアーキテクチャ、機能、アナログ入力範囲を含めてADCの選択に大きく影響します。
- エンド・アプリケーション: 検出シグナル・チェーン内における高い分解能、精度、あるいは速度の必要性を決定します。たとえば、広い速度範囲にわたってセンサーレス制御を実現するには、より多くの測定値をより頻繁に、なおかつより高い精度で収集する必要があります。エンド・アプリケーションはADC機能に関する要求にも影響を与えます。たとえば、多軸制御にはチャンネル数の多いADCが必要です。
電流センサーと電圧センサー
モーター制御に最も一般的に使用される電流センサーには、シャント抵抗、ホール効果(HE)センサー、そして電流トランス(CT)があります。シャント抵抗はより多くの電流が流れると、絶縁機能が働かず損失も大きくなりますが、あらゆるセンサーの中で最も良好な直線性を示し、低コストでAC測定とDC測定の両方に適しています。シャントの出力損失を抑えるには信号レベルを下げる必要があるので、通常、シャント・アプリケーションは50A以下に制限されます。CTやHEセンサーは本質的に絶縁機能を備えおり、大電流システムに使用できますが、シャント抵抗を使用したソリューションに比べてコストが高く、精度も劣ります。これは、センサー自体の初期精度が低いことに加え、温度に対する精度も低いことに起因します。
モーター電流測定の位置とトポロジ
センサーの種類以外の面に着目すると、選択すべきモーター電流の測定ノードは複数あります。DCリンクの平均電流は制御の目的で使用できますが、より高度な駆動機器ではモーター巻線電流が主なフィードバック変数として使用されます。同相巻線電流の直接測定は理想的な方法で、これは高性能なシステムで採用されています。しかし、巻線電流は、下側の各インバータ・レッグ内にあるシャントを使用するか、DCリンク内の単一シャントを使用して間接的に測定することもできます。これらの方法の利点はすべてのシャント信号を電源コモン基準にできることですが、DCリンクから巻線電流を抽出するには、サンプリングをPWMスイッチングに同期させる必要があります。シャント抵抗信号を絶縁してあることを前提に、同相巻線電流の直接測定は上記に挙げた任意の電流検出手法によって行うことができます。
同相アンプは機能的絶縁に使用できますが、人間を対象とした安全絶縁には、絶縁されたアンプや変調器を使用する必要があります。
{kind=link}
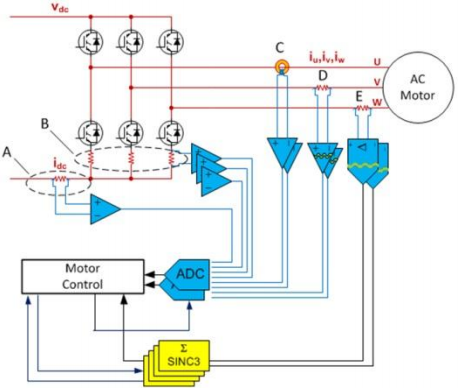
図4. 絶縁および非絶縁モーター電流フィードバック
以上に述べたさまざまな電流フィードバック・オプションを図4に示します。制御フィードバックに必要なのはこのうちの1つだけですが、DCリンク電流信号は保護用のバックアップ信号として使用できます。
すでに述べたように、システム電源とグラウンドの分割はどの等級の絶縁が必要か、ひいてはどのフィードバック・オプションが適しているかを決定します。システムの目標性能もセンサーの選択と測定手法に影響します。さまざまな性能範囲の中で実現できる形態は数多くあります。
低性能システムの例:電力段と制御段が同電位、検出オプションAまたはB
レッグ・シャントを使用する方法は、最も経済的なモーター電流測定方法です。電力段が制御段と同じ電位を使用するこの例では、扱わなければならない同相電圧が存在せず、オプションAまたはBからの出力はシグナル・コンディショニング回路とADCに直接接続できます。一般にこのタイプのトポロジは、マイクロプロセッサに組み込まれたADCを使用する低電力、低性能のシステムに見られます。
高性能システムの例:制御段をグラウンドに接続、検出オプションC、D、またはE
この例では人間の安全を確保するための絶縁が必要です。検出オプションC、D、およびEのすべてが可能です。3つのオプションの中ではオプションEが最も高品質の電流フィードバックを提供し、より高い性能のシステムとなります。これらのシステムでは、絶縁された変調器信号にデジタル・フィルタを提供することのできるFPGAでの処理や、その他の形態の処理が使われることがあります。オプションC用、つまり絶縁センサー(閉ループHEが多い)時のADCの選択では、現在使用可能な内蔵ADCで実現できる性能よりも高い性能を実現しようとすれば、従来通りのディスクリート設計となります。オプションDでは安全絶縁が必要なので、この構成では同相アンプではなく絶縁アンプを使用します。絶縁アンプは性能を制限するので、内蔵ADCソリューションで十分です。これによる電流フィードバックの忠実度はオプションCやEと比較して最も低く、内蔵ADCは「無料」と見なされ、絶縁アンプも「安価」であることが多いのですが、通常、実装にはオフセット補償とADC入力範囲整合用レベル・シフトのための追加部品が必要なので、シグナル・チェーン全体としてのコストは上昇します。
モーター電流を検出するための制御設計に使用できるトポロジは数多くありますが、コスト、出力レベル、性能レベルなど、考慮すべき要素も数多くあります。多くのシステム設計者の主な目標は、そのコスト目標の範囲内で効率を向上させるために、電流検出フィードバックを改善することです。より高度なエンド・アプリケーションの場合、電流フィードバックは効率だけではなく、ダイナミック応答、音響ノイズ、あるいはトルク・リップルといった他のシステム性能値にとっても重要です。さまざまなトポロジに応じて低性能から高性能まで一連の性能範囲があることは言うまでもありません。低出力オプションと高出力オプションの両方について、その概要を図5に示します。
{kind=link}
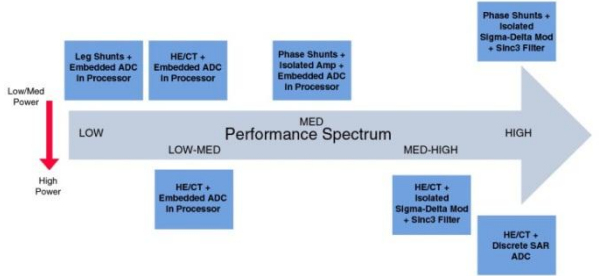
図5. 電流検出トポロジの性能範囲
モーター制御システム設計者の目標、ニーズ、およびその傾向:HEセンサーからシャント抵抗への移行
シャント抵抗と絶縁Σ-Δ変調器の組み合わせは最も高品質の電流フィードバックを実現し、その電流レベルもシャントの使用に適した十分に低い値となります。システム設計者の間には、HEセンサーからシャント抵抗への移行という明確な傾向が見られ、さらに絶縁アンプではなく絶縁変調器を使用するという新たな傾向も見られます。センサーに関する変化は、部品表(BOM)コストとPCB挿入コストが低いこと、およびセンサー精度が向上したことによるものです。シャント抵抗は磁界や機械的振動の影響を受けにくいのが特長です。HEセンサーをシャント抵抗に置き換える設計者は、絶縁アンプを選ぶことが非常に多くなっています。また、シグナル・チェーンの変更レベルを制限するHEセンサー・ベースの設計に使用していたADCをそのまま使用する例も見られます。しかしすでに述べたように、システムの性能はADCの性能に関わらず絶縁アンプの性能によって制限されます。
さらに、絶縁アンプとADCを絶縁Σ-Δ変調器に置き換えれば性能上のボトルネックを無くして設計を大幅に改善し、9~10ビット・レベルの品質のフィードバックから12ビット・レベルに引き上げることができます。Σ-Δ変調器出力を処理するために必要なデジタル・フィルタは、高速過電流保護(OCP)ループを実装するように設定することもできるので、アナログOCP回路を省略できる場合もあります。したがってBOM分析には、絶縁アンプ、オリジナルのADC、およびこれらの間のシグナル・コンディショニングだけでなく、省略が可能と思われるOCPデバイスも含める必要があります。
アナログ・デバイセズのiCoupler®技術に基づくAD7401Aの絶縁Σ-Δ変調器はこの傾向を取り込むための理想的な製品で、±250mVの差動入力範囲(OCPには通常±320mVフルスケールで使用)は抵抗シャント測定に最適です。アナログ入力はアナログ変調器によって連続的にサンプリングされ、入力情報はデジタル出力ストリーム内に最大データ・レート20MHzの1の密度として格納されます。オリジナル情報は適切なデジタル・フィルタを使用して構成し直すことができます。これには通常、高精度電流測定用のSINC3フィルタが使われます。変換性能は、帯域幅あるいはフィルタのグループ遅延とトレードオフできるので、より「粗い」高速のフィルタを使用すれば、IGBT保護に最適な2µsクラスの高速応答のOCPを実現することができます。
シャント抵抗小型化への要求シャント抵抗小型化への要求
感度と消費電力はトレードオフの関係にあるので、信号測定の側面からすると、シャント抵抗の選択に関していくつかの重要な課題があります。抵抗値が大きければΣ-Δ変調器の全範囲、あるいは可能な限り広いアナログ入力範囲を使用できるようになり、ダイナミック・レンジが最大限に広がります。しかし、抵抗値が大きくなると電圧降下も大きくなるので、抵抗のI2×R損失によって効率が低下します。自己発熱効果による非直線性も、大きな抵抗を使用する場合の課題のひとつです。結果としてシステム設計者はトレードオフの問題に直面し、電流レベルの異なるさまざまなモデルやモーターに使用できるシャント・サイズを選択するために、さらなるトレードオフの必要に迫られます。モーターの定格電流の数倍にもなり得るピーク電流に対して、ダイナミック・レンジを維持し、信頼性を維持しながら、それらを両立させなければならないことも難しい問題です。システムのターンオン時にピーク電流を制御する能力は設計によって大きく異なり、たとえば公称値の30%増しという狭い範囲の制御から、公称電流の10倍という広い範囲まで、さまざまです。ピーク電流も、加速や負荷、あるいはトルクの変化によって異なります。しかし、一般的には、ドライブ設計におけるシステム内のピーク電流は、公称電流の4倍程度の範囲となるのが普通です。
これらの課題に対して、システム設計者は、広いダイナミック・レンジ、あるいは良好な信号対ノイズ+歪み比(SINAD)を備えた優れたΣ-Δ変調器を求めています。現在までに提供されている絶縁Σ-Δ変調器では、16ビットの分解能と最大12ビットの有効ビット数(ENOB)の性能が保証されています。

低電力ドライブにおけるシャント抵抗使用への移行に続き、モーター・ドライブのメーカーは、ドライブの出力定格を上げることに目を向けています。これには、性能およびコスト両方の理由からこのトポロジを使用できます。しかし、これは小型のシャント抵抗を使用することによってのみ可能で、これを実現するには、信号振幅の減少という問題を解決するために、はるかに高い性能を持つ変調器コアが必要です。
システム設計者、特にサーボ設計者は、A/D変換時間の短縮、あるいはグループ遅延の減少によるシステム応答の改善にも常に目を向けています。これらの時間短縮や遅延減少は、絶縁Σ-Δ変調器およびシャント抵抗からなるトポロジに対応するデジタル・フィルタを通じて実現されます。すでに述べたように、変換性能は、帯域幅あるいはフィルタのグループ遅延とトレードオフの関係にあります。より「粗い」高速のフィルタを使用すれば応答は速くなりますが、性能が低下します。システム設計者はフィルタ長とデシメーション・レシオの効果を分析して、エンド・アプリケーションのニーズに合わせてトレードオフを行います。変調器のクロック・レートを上げることは有効な方法ですが、すでに多くの設計者はAD7401Aが受け入れることのできる20MHzの最大クロック・レートを使用しています。クロック・レートを上げることの欠点は、放射や干渉(EMI)の恐れがあることです。同じクロック・レートでより高性能の変調器があれば、グループ遅延と性能のトレードオフを改善して、性能に影響を及ぼすことなく応答時間を短縮することができます。
業界最高性能の絶縁Σ-Δ変調器
高性能の絶縁Σ-Δ変調器が産業用モーター制御設計のいくつかのニーズや傾向に対応していくこと、そしてシャント抵抗の小型化によりモーター・ドライブの電力効率が上がり、センサーレス制御方式の改善が図られ、高効率の永久磁石モーター(IPM)の制御が可能になることは明らかです。
アナログ・デバイセズのAD7403はAD7401Aの次世代製品で、同じ20MHzの外部クロック・レートではるかに広いダイナミック・レンジを実現します。これにより、柔軟にシャント・サイズを選択でき、ドライブとモーターの整合の最適化、公称電流とピーク電流の測定改善、様々なモデルのモーターに対して単一のシャント使用の影響を抑えられ、また、高電流レベルでHEセンサーの代わりにシャント抵抗を使用することが可能となります。また、測定遅延の短縮によりダイナミック応答も改善されます。さらにAD7403は旧世代のAD7400AやAD7401Aよりも高い連続動作電圧値(VIORM)を有する絶縁方式を特長とするため、より高いDCバス電圧を使用し、それによるモーター電流の減少によって、システム効率を向上させることが可能となります。
ADSP-CM40xミックスド・シグナル・コントロール・ プロセッサを含む広範なシステム・ソリューション
すでに述べたように、Σ-Δ変調器を実装するにはシステム内にデジタル・フィルタが必要です。これは従来、FPGAやデジタルASICにより実装されていました。AD740xシリーズの絶縁Σ-Δ変調器を直接接続できるハードウェアSINC3フィルタを含むADSP-CM408Fミックスド・シグナル・コントロール・プロセッサの出現によって、絶縁Σ-Δ変調器と組み合わせた抵抗シャント電流検出手法を適用する割合が増えることが見込まれます。すでに概要を示したように、従来この手法は、デジタル・ドメインのシステムが複雑になって関連(FPGA)コストもかかることから、高価であると考えられていました。ADSP-CM408Fはコスト効率の良いソリューションであり、これまではコスト面からあきらめざるを得なかった抵抗シャント電流検出を、多くの設計者が検討できるようになると思われます。
著者について
この記事に関して
製品
産業向けソリューション




















