Low Voltage Motor Control
要約
IoT and hand-held devices rely on actuators, despite having limited energy – often a battery. For cost and reliability reasons, these batteries preferably have a low cell count, with a voltage range of 2.4V to 4.3V for many devices, whether it’s for security, home automation, medical, or battery-powered POS devices. Actuators in these devices often need only short-term motion, e.g. when adjusting a valve, dosing a medicament or moving a camera. Limited power sources restrict both peak power and long-term energy consumption. Thus, energy efficiency is critical – even with a low duty cycle.
This paper focuses on the aspects of driving a stepper motor or a DC motor with a local energy source, like a single Li-Ion cell or dual/triple AA-Battery. Measurements taken with an example setup show the limitations and deliver performance figures for the motor and driver combination. A topology with a step-up voltage regulator is compared to a solution with a motor wound for low voltage operation.
Introduction
Despite having a limited energy supply, more and more hand-held devices and IoT applications rely on actuators. And while a bigger battery has some benefits, it’s the ones with a low cell count that are preferred by device manufacturers for cost, reliability, size and weight, lifetime, safety and recycling reasons. Whether it’s for home automation, security, medical, or handheld POS devices, batteries with a voltage range of 2.4V - 4.3V seem the preferred power source.
However, these batteries have certain characteristics that pose new challenges for not only the motors themselves but also for designs and technologies related to motor control and motion control. This poses the question for motor and motion control: How do you efficiently control a stepper or DC motor from a low voltage power source?
The Power Source
The power source is a central item of portable equipment – it’s not only a relevant part for the electrical capabilities, but also for cost, size and weight. Further, for mass products, sustainability, runtime and service/charging interval, overall lifetime, safety and recycling options are important. After all, several of these aspects determine user experience. Power sources to be considered are rechargeable batteries (Li-Ion/LiPo, NiMH cells) or Alkaline batteries. Also, combinations of rechargeable batteries and harvesting sources like solar energy for equipment used in bright environments, Peltier-elements, or combinations with supercapacitors could be considered.
A. Optimization Targets
A low overall power-draw either positively influences the required size of the energy storage or helps to increase lifetime or service interval. Depending on the duty cycle of the equipment, the overall power consumption is determined by operation phases and their duty cycle, as well as by the standby current draw and the desired standby lifetime. The energy source also must be able to supply the momentary peak power for operation. This especially becomes an issue with high resistive sources like partially used non-rechargeable AA cells.
Further, a low supply voltage operation makes circuitry simpler, e.g. by reducing the number of battery cells required and simplifying charging.
Example of standby vs. impulse load: Each 100µA of standby current adds up to 0.1mA*24h*365=876mAh per year. For impulse load, 500mA operating current for a total of 10 seconds a day uses 500mA*365*10/3600=507mAh per year. This example shows that standby current may be an issue for applications with low operating duty cycle. Standby is often used in conjunction with power ICs to save an additional (semiconductor) switch, which is capable to interrupt the power supply completely. An additional switch is not expensive but it might waste significant energy during its on-time as the full load current passes through the switch.
B. Battery Characteristics
The characteristics of different types of batteries were taken by measurement. The category “Near Empty” is a difficult one when considering Alkaline batteries, because a relevant part of their energy still is available in an area where voltage is already quite low and resistance is high. “Empty” for an electronics device thus often corresponds to something like half-empty concerning battery chemistry. The peak power available from a battery is limited by either the inner resistance of the power source, e.g. when considering AA cells, or by safety circuitry in case of protected Li-Ion cells. With a high resistance source, maximum power is available at half the remaining voltage, e.g. at 0.75V for a 1.5V battery. Exploiting the battery this way makes sense for short time peak periods when it’s nearly empty, as half of the power is wasted inside the battery itself. This way it can be used down to an empty level.
When considering direct operation of a microcontroller and additional circuitry from the battery, the lower voltage must be limited to e.g. 3.0V for a 3.3V microcontroller, or roughly 2V for a 1.8V device. This has to be considered to avoid the microcontroller resetting itself during peak load conditions. An experiment shows, that power available at 2V for a “Near Empty”, non-rechargeable dual AA battery is quite limited and less than half of the peak power that’s still available. Peak power for a dual AA alkaline in “Near Empty” state with 2.61V remaining is still 2.06W while allowing the voltage to drop to half of the remaining voltage vs. 0.74W while allowing a voltage drop to no less than 2V.

Table I. Characteristics of different battery types
C. Improving The Power Source: Add An Ultracapacitor
A simple means to supply a short-time peak current from a high-resistive supply is adding a capacitor. Relevant capacities are available when using an ultracapacitor. Keep in mind that a single capacitor can do max. 2.7V and thus has to be protected when the supply voltage can exceed this value, e.g. by adding a low-drop regulator. For higher voltages a series connection of two capacitors can be used. Keep in mind that dual capacitors require a means for balancing, e.g. (active) Zener diodes. An example for supply buffering using an (ultra)capacitor: Desired max. voltage drop of 0.2V at 1s, 500mA load:

Size for a 0.5F type capacitor: 12mm height, 8mm diameter; 10F type: 22.5mm height, 12mm diameter.
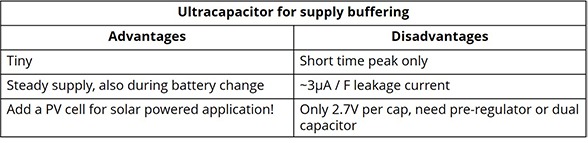
Table II. Advantages and disadvantages of ulracapacitors
D. Improving The Power Source: Add A Step-Up Converter
A step-up converter offers a high voltage from a low-voltage source. This makes it ideal for using an Alkaline battery to the last drop or to adapt ICs which cannot cope with a low voltage supply to battery operation. A typical multiplication factor of the step-up converter voltage is between 1 and 4, while a higher factor often reduces efficiency. Considering this, the step-up converter can easily supply 3V to 10V from a 3V source. Off-the-shelf ICs only require an inductivity (which is the biggest and often most expensive part) plus a few capacitors.

Table III. Advantages and disadvantages of step-up converter
Driving A Stepper Motor Low Voltage
Applications benefitting the most from stepper motors are positioning applications or those demanding relative motion, applications requiring stable position holding over longer periods, those with brief motion, those requiring movement with precise velocity, or applications requiring high torque at a low speed. Generally, two types of stepper motors are available: inexpensive permanent magnet stepper motors, and more expensive hybrid stepper motors.

Figure 1. Open-source tmc2300-motor-eval board for evaluation of the tmc2300 stepper motor driver for battery-powered applications
As battery-powered applications normally require a compact solution, standard hybrid steppers like the NEMA 17 types are too large. Even if NEMA 17 offers the best value-for-money due to high volume usage, e.g. in 3D printers. Smaller hybrid stepper motors like NEMA 11 and NEMA 8 or even smaller come at an increased price. As such, inexpensive permanent magnet stepper motors are often preferred for mobile solutions and widely available in different sizes with manufacturer-specific mounting schemes. Standard types often come with a motor coil wound for 5V or for 12V. Both voltages are neither intended nor good for battery operation. Instead, they are intended for mains operated constant voltage driving scheme with quite limited motor velocity as there is no headroom for back EMF, which builds up at increased velocity. A 5V or 12V coil requires a huge count of windings of a thin wire in the motor.
To adapt a motor to lower voltage operation, fewer windings of a thicker wire are required. This is easy to do and all motor manufacturers offer to adapt the winding. But which winding is optimum for a battery-powered applications?

Table IV. Main relevant parameters for a stepper motor
To understand this, let’s look at the motor supply voltage requirements for a stepper motor: Motor torque is directly proportional to the coil current multiplied by the number of windings, since each Ampere of current flow contributes with a certain amount to the magnetic field and thus to motor torque.
The specified motor torque is reached with the RMS ICOIL current in both motor coils to build up the required magnetic field strength. A lower current will basically generate a proportionally lower torque, e.g. 70% of torque at 70% current. Even a reduction to 70% saves a lot of energy since power dissipation goes with the square of the current. Thus, a motor with more reserves can offer better efficiency!
With this, the required supply voltage UBAT for motor standstill can be calculated, taking into account the driver’s power stage resistance plus a few 100mV loss in the sense resistor (170mΩ per bridge MOSFET for the TMC2300 low voltage stepper driver and 0.3V peak at the sense resistor):

ICOIL is the RMS motor current which gives the desired torque at standstill. At slow motion with negligible back EMF, there is not much difference to the standstill case calculated here.
For higher velocity operation (more than a few electrical rotations per second), the motor’s specific back EMF constant CBEMF should additionally be taken into account (see below explanation). With this, the lowest feasible supply voltage for a given motor and a maximum velocity [RPM] calculates to:

This formula uses the quotient of holding torque and assigned coil current (taken from motor datasheet) to calculate the motor’s back EMF constant.
With most motor suppliers, the coil winding has to be adapted for battery-powered operation. This allows trading in a lower motor voltage for battery operation versus higher motor current. E.g. a motor with a short, thick coil wire can work at a lower voltage than the same motor with a long, thin coil wire, but it needs a higher current for the same torque. Coil power dissipation and motor efficiency stay identical for both motor windings.
A. Example: Linear Actuator For Heating Valve
Original motor: 5Ω coil resistance; Modified motor: 1.5Ω, Tests performed with the TMC2300 low voltage driver IC at 3.3V and 5V, with the assumption that the motor power dissipation is identical due to the same degree of copper filling in the coils. The motor is operated at 320Hz full step (beyond resonance). The scope shots below show the different height of supply current and motor coil current (increased current for lower resistive motor) and the supply voltage.

Figure 2. Scope shot showing coil current of a 1.5Ω motor (adapted winding) at 3.3V (left) vs. 5.0Ω motor at 5V (right). Supply current (purple) and supply (green)

Table V. Stepper motor with adapted coil vs. Standard coil
Based on the measurements we can conclude that using the same driver IC, the lower voltage motor can deliver the same torque with a lower supply voltage. Due to increased coil current, power dissipation within the driver stage is higher and adds the power demand. On the other hand, when a single Li-Ion cell is used as power supply, a step-up converter (which also has limited efficiency of maybe 90 to 95%) can be eliminated.
Further, this example shows that the power stage’s resistance in a low voltage motor driver IC is a key feature to efficiency. A higher resistance not only wastes power in the power stage, it also reduces voltage headroom to drive the actuator, which means it has to be designed for an even lower voltage and thus higher current. Conventional driver ICs, even for low voltage, have a problem with low-voltage.
This is shown using a standard MOSFET as an example, which is similar to MOSFETs integrated into ICs: The final on-resistance (RDSon) of the FET is reached between 4V and 6V gate voltage. The area below 4V shows drastically increased resistance. To yield a low RDSon, the battery supply driver IC needs an internal step-up converter, at the minimum to drive the power MOSFETs. The curves below illustrate RDSon vs. supply voltage for an IC which is specially designed for low voltage operation, integrating a voltage multiplier for control of the power stage instead of a standard transistor. A comparison is made of the shape of the curves, not the actual value.
The area of operation with 2AA cells is circled in blue, showing differences for the MOSFET, resp. a conventional driver IC in RDSon of a factor of 2, while the single Li-Ion cell operation voltage of 3V – 4V still shows significant benefits for the optimized IC.
Below is a visualization of the comparison. The figure on the left shows low-voltage operation of a MOSFET (BSS138) with similar characteristics to a power stage of a standard motor driver IC. The figure on the right shows low-voltage operation of a dedicated low-voltage stepper driver IC, which uses internal circuitry to enhance MOSFET conductivity.

Figure 3. Low-voltage operation of a MOSFET (BSS138) shows similar characteristics to a power stage of a standard motor driver IC and Figure 4. Low-voltage operation of a dedicated low-voltage stepper driver IC, which uses internal circuitry to enhance MOSFET conductivity
DRIVING A DC MOTOR LOW VOLTAGE
Is it a challenge to drive a DC motor from a low voltage? Basically – No. Low voltage is not a problem. Even in the 1.5V to 6V range, motors are available in hundreds of variants. Simply apply the supply voltage to move the motor. But as soon as the motor shall be velocity-, direction- or torque-controlled, and at the same time a CPU shall be supplied from the same source, motor current has to be limited.
The scope shots below explain why: A significant voltage drop results from motor acceleration, and an even bigger voltage drop shows when changing motor direction. The voltage drop would lead to a brown-out of a sensitive CPU. How should this be solved? A current limited driver automatically avoids these situations by limiting motor current to what is really needed by the application.
The first scope shot shows the start and stop operation of a DC motor. Current is only limited by motor resistance and rises beyond 1A. When reversing the motor, an even higher peak current of 1.5A would result. The second scope shot shows reversing with current limited by an intelligent driver IC (TMC7300).
Below on the left is a scope shot showing the start and stop operation of a 3V motor driven from a 3.3V supply. Note the 1A peak (blue line) at start of motor leads to voltage drop. Current is limited by Coil resistance, only. The scope shot on the right shows reversing a 3V motor driven from a 3.3V supply. Note the supply current peak is limited to 500mA by a dedicated motor driver IC TMC7300.

Figure 5. Start and stop operation of a 3V motor driven from a 3.3V supply - Note the 1A peak (blue line) at start of motor leads to voltage drop. Current is limited by Coil resistance, only. and Figure 6. Reversing a 3V motor driven from a 3.3V supply - Note the supply current peak is limited to 500mA by a dedicated motor driver IC TMC7300.
Driving A BLDC Motor At Low Voltage
Availability of low-voltage, high-torque BLDC-motors is excellent, driven by fairly new use cases such as drones. Coil resistance of these motors is very low so that the required supply voltage in the first line is a function of the desired rotation velocity. As a BLDC motor requires a closed-loop commutation in every case, the integration of a current control loop is required and can easily be extended to take care of the maximum current draw available at the power supply. Be aware that also the RDSon of the driver IC is significant for the application, just like for a stepper motor: Especially for low voltage operation, a driver with low RDSon at low voltage should be used, like the TMC6300. With a standard IC, the RDSon could easily be in the same order of magnitude as the coil resistance.
Conclusion
The power source is a central item of handheld devices. The wish for a low cell count, imposes new challenges for motor and motion control designs. To optimize for efficiency, weight and economics, it is important to identify these challenges and address them the best way possible.
As discussed in this paper, the low voltage challenge can be addressed by improving the power source, e.g. using a step-up converter or ultra-capacitors. However, both methods impose disadvantages of their own. Further, motors declared as low voltage motor, are not always suited for battery operation since they are designed for low voltage operation with a mains power source.
To push innovation in battery-operated devices, dedicated, low voltage motor driver ICs in combination with suitable motors are the preferred solution. Besides adding proven technologies like intelligent power ICs to portable applications, dedicated drivers reduce overhead cost and improve user experience.
著者について
この記事に関して
























