Thought Leadership


 Close Details
Close Details
Why 10BASE-T1S Is the Missing Ethernet Link for Automotive Communications
Abstract
New IEEE automotive Ethernet standards continue to emerge, one of the latest being 10BASE-T1S Ethernet. This article discusses the trends in the automotive industry dictating changes in vehicle electrical/electronic (E/E) architecture and how the new 10BASE-T1S standard supports and enables this new architecture rollout.
Megatrends Providing New Opportunities
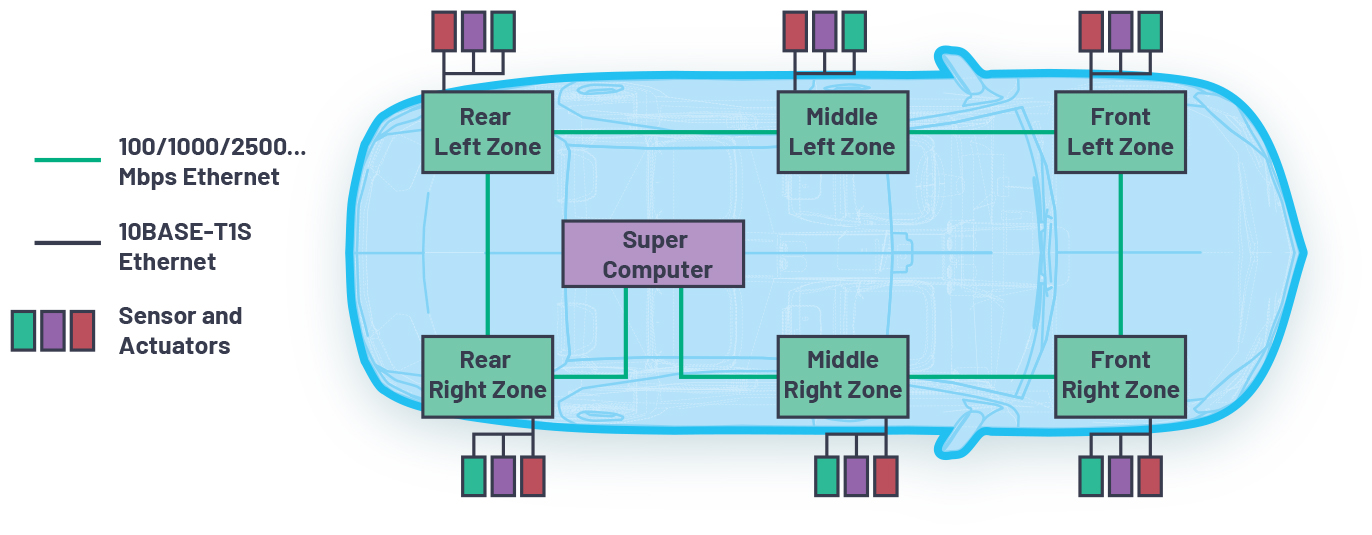
The automotive industry is presently going through one of its most revolutionary periods. Car manufacturers need to quickly provide solutions to several significant megatrends such as personalization, electrification, autonomy, and full connectivity. OEMs will need to radically modify their E/E architecture to support the new functionality. While this revolution presents a significant technical challenge, it also provides an opportunity for OEMs to consider moving E/E architectures away from domain-based solutions, which have become unwieldy from continuous add-ons over platform generations. With this significant architecture change, OEMs can focus on enabling a superior technical solution while also adding new post-sale revenue streams through features such as vehicle personalization, sale of services, and over-the-air (OTA) upgrades. The industry is gravitating toward a common new architecture, often referred to as zonal architecture, and looks to leverage technology and lessons from other industries, most notably the IT sector—making the car essentially a computer on wheels.
Zonal architectures determine connectivity by physical location rather than function, as was the case in domain-based architectures. This change significantly reduces the number of electronic control units (ECUs) in the vehicle and removes up to 1 km1 of harness cabling. Secondly, it decouples hardware and software, providing a service orientated architecture (SOA). Many OEMs are investing heavily to bring ownership of software in house, with the aim to provide an end-to-end solution that simplifies integration of platforms and offers more cross-functional capability2. This scalable software platform approach will minimize variants, open opportunities to new revenue streams, lead to reduced R&D investment in the longer term, and shorten development times while supporting multiple car lines.
These revolutionary architecture changes come with many challenges and have led many OEMs to restructure their entire organizations away from individual groups with ownership to deliver only specific domain functions and toward more integrated cross-functional organizations.
Automotive is rapidly becoming a major consumer of Ethernet devices, and widespread Ethernet rollout in vehicles is seen as one of the key pillars to the successful introduction of these new architectures. Ethernet brings the required scalability, supports multiple speed grades, is a proven robust transmission media, supports a service-based architecture, and has fully developed safety and security building blocks. Ethernet has a clearly defined and well understood OSI model that makes it easier to manage the complexity of the entire car network.
Unique Aspects of Automotive
While many fundamental Ethernet concepts can be leveraged from other industries, the automotive E/E architecture has some unique requirements that dictate the need for new technology developments. One key focus for automotive is to reduce the weight of the vehicle, which has a direct impact on vehicle range. The cable harness used today is one of the three heaviest subsystems in the vehicle (weighing up to 60 kg)3. Traditional Ethernet cables use four differential pairs for data transmission, adding weight and routing complexity, which is not optimal for automotive applications. To address this, new IEEE standards were developed to support Ethernet transmission over single twisted pair cables, which, coupled with the reduced cable harness lengths enabled by zonal architecture, can offer significant cable savings and weight reduction.
What Drives the Need for 10BASE-T1S?
As the concept of zonal-based architectures evolved, it became evident that Ethernet connectivity all the way to edge sensors and actuators would be required to fully leverage the advantages of this new architecture. Existing legacy connectivity technologies such as FlexRay and CAN require protocol translation normally implemented in gateways, which can add cost, complexity, and latency. Existing automotive Ethernet technologies such as 100BASE-T1 did not meet the system costs to support transitioning edge connectivity applications to Ethernet, as this technology required the use of point-to-point switched connectivity. The result was a call for interest from the IEEE to provide a solution to this problem. Some of the key requirements included:4
- Faster communication than existing technologies; for example, CAN(FD)
- Replacement of legacy in-vehicle networking technologies like FlexRay
- An alternative to 100BASE-T1 for ECUs where 100BASE-T1 is not cost and energy efficient
- The ability to support connectivity for simple and redundant sensor networks
What Is 10BASE-T1S?
The 10BASE-T1S specification was developed as part of the IEEE 802.3cg standard, which was published in February 2020. 10BASE-T1S provides the missing link in the automotive Ethernet ecosystem, enabling true Ethernet-to-the-edge connectivity and addressing the needs of zonal architecture.
One exciting, unique aspect of 10BASE-T1S differing from other automotive Ethernet technologies is the support for a multidrop topology with all the nodes connected over the same unshielded twisted pair cable. This bus implementation provides an optimized BOM only requiring a single Ethernet PHY in each node, removing the need for a switch or star topology implementation associated with other Ethernet technologies. The standard specifies that at least eight nodes must be supported (it is possible to support many more), and bus lengths of up to 25 m must be possible.
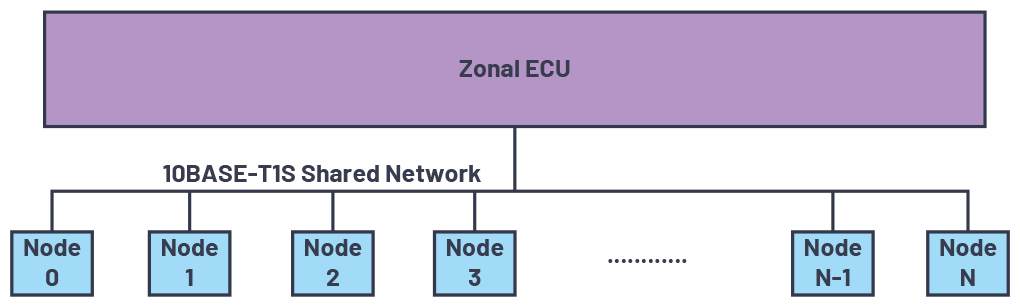
One other new aspect of the standard is physical layer collision avoidance (PLCA), which, as the name suggests, avoids collision on the shared network. This implementation ensures deterministic maximum latency dictated mainly by the number of nodes on the network and the amount of data to be transmitted. Each node is assigned an opportunity to transmit. If a node has no data to transmit at the time, it hands over the transmit opportunity to the next node, thereby supporting very high utilization of the 10 Mbps available.
Power over a 10BASE-T1S network is also possible given the fact it is an AC-coupled system. This provides further cable saving, reduced connector sizes, and improved reliability resulting from reduced cable and connector complexity. Standardization of power over data lines (PoDL)—which is already available for point-to-point implementations—is ongoing as part of the enhancements to IEEE standards to support the multidrop topology.
Applications for 10BASE-T1S in automotive are broad and varied with many sensors and actuators across multiple functions in body domain, comfort, infotainment, and ADAS under discussion.
Conclusion
The automotive E/E architecture is undergoing a revolutionary change. The transition to zonal E/E architectures is imminent. 10BASE-T1S provides the missing link to support this transition with optimized Ethernet to the edge connectivity. There are still hurdles to overcome in this rollout such as the perception that Ethernet connectivity adds component cost and complexity to module implementations. 10BASE-T1S directly addresses these concerns by providing reduced system cost and a variety of product options that support different kinds of signal chain partitioning. Analog Devices is actively engaged in driving the rollout of 10BASE-T1S through active participation in standardization activities and close OEM engagements to ensure their system requirements are addressed.
Contact Analog Devices to hear about our 10BASE-T1S product offerings and how we plan to help the rollout of 10BASE-T1S in automotive applications.
References
1 Cariad. May 2021.
2 Ryan Fletcher. “The Case for an End-To-End Automotive-Software Platform.” McKinsey & Company, January 2020.
3 Dan Scott. “Wiring Harness Development in Today’s Automotive World.” Siemens, July 2020.
4 10Mb/s Single Twisted Pair Ethernet Call for Interest. IEEE 802.3 Ethernet Working Group.