Sensorless Vector Control Techniques for Efficient Motor Control Continues
Sensorless Vector Control Techniques for Efficient Motor Control Continues
Sep 1 2013
Advanced modeling techniques centric to motor and power stage dynamics can yield significant gains in motor control efficiency, assuring precise control that adapts to fluctuations in system behavior in real time. Through the application of sensorless vector control techniques, designers can enhance the performance and lower the power consumption of motor systems, and comply with emerging government legislation designed to increase energy efficiency. New motor control schemes enabled by next generation digital signal processing technology promise to accelerate the adoption of advanced control schemes.
Over the last decade, the development and easier deployment of very highly exposed permanent magnet materials have driven an increased use of permanent magnet synchronous motors (PMSMs) in high performance variable speed motors for many industrial applications. Inherent advantages of using a PMSM drive include a high ratio of torque to weight, high power factor, faster response, rugged construction, easy maintenance, ease of control and high efficiency. The high performance speed and/or position control requires an accurate knowledge of rotor shaft position and velocity in order to synchronize the phase excitation pulses to the rotor position. This implies the need for speed and position sensors such as absolute encoders and magnetic resolvers attached to the shaft of the motor. However, in most applications, these sensors present several disadvantages, such as reduced reliability, susceptibility to noise, additional cost and weight, and increased complexity of the drive system. Sensorless vector control eliminates the need for speed/position sensors, overcoming these challenges.
In recent years, several solutions have been proposed in research literature centric to both speed and position sensorless methods for the PMSM. Three basic techniques have been developed for sensorless rotor position estimation of PMSM drives:
- Various techniques based on back-electromotive-force (back EMF) estimation
- Techniques based on state observers and extended Kalman filters (EKF)
- Other techniques based on motor modeling real time
Back EMF Techniques
Position estimation based on back EMF techniques estimates the flux and velocity from the voltage and current, which is especially sensitive to the stator resistance at low speed range. The actual voltage information on the machine terminal can hardly be detected because of the small back EMF of the machine and the system noise produced by the nonlinear characteristics of the switching devices. Back EMF methods yield good position estimation in middle and high speed, but fail in the low speed region.
The magnitude of back EMF voltage is proportional to the rotor speed, thus at standstill it is impossible to estimate the initial position. Therefore, starting from an unknown rotor position may be accompanied by a temporary reverse rotation or may cause a starting failure. Because of its ability to perform state estimation for nonlinear systems that involve a random noise environment, the EKF appears to be a viable and computationally efficient candidate for the online estimation of speed and rotor position of a PMSM.
The technique based on spatial saliency tracking using magnetic saliency is suitable for zero speed operation and makes it possible to estimate the initial rotor position without parameter influences. For initial rotor position, there are mainly two basic methods based on the use of pulse signal injection or sinusoidal carrier signal injection.
Let’s take a look at one example.
{kind=link}

Figure 1. Balance of Back EMF and initial start (attributed to Bon-Ho Bae).
Figure 1 presents the block diagram of the sensorless vector control scheme without the position sensor. In the block diagram, with the feedforward terms Vds_ff and Vqs_ff, for the control between the axis, equations can be constructed as:
![]()
![]()
where ωr is the speed of the rotor.
Only looking at the standard voltage equations of the interior PMSM (IPMSM), the reference frame is represented by:
![]()
![]()
With θerr being the angle difference between real and estimated angle.
Now upon repositioning the d-axis we find:
![]()
Defining that the current PI regulator will produce a small error—the θerr is small and the d-axis can be expressed as:

In the proposed estimator of Figure 1 and the derived equations, the error signal Vds_error is processed by the PI compensator to derive the speed of the rotor, and the angle of the rotor is calculated by integrating the estimated speed. In other conventional methods, the differentiation process is used to calculate the speed, but this makes the system vulnerable to noise. In studies by Bon-Ho Bae, experimental research has shown that the proposed estimator provides very accurate and robust speed information for the application. But at zero and low speed, the back EMF voltage is not high enough for the proposed vector control. Hence, for the seamless operation from zero speed, the current has been controlled with a constant magnitude and a prepatterned frequency. Here the angle for the synchronous reference frame is derived by integrating the frequency (initial startup method).
EKF Techniques
Let’s look at another example, now using the EKF technique principles (attributed to Mohamed Boussak), and again combining with initial startup.
{kind=link}

Figure 2.
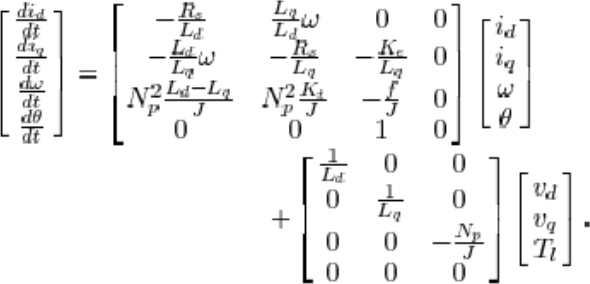
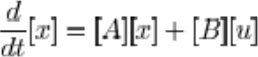
Starting with the basics of the PMSM and rewriting these into a fourth order dynamic model gives us:

where:
![]()
And the torque produced by the PMSM is given as:
![]()
The dynamic model is based on some simple assumptions—sinusoidal back EMF and eddy currents ignored, which now gives:
The d- and q-axis currents cannot be controlled independently by Vd and Vq voltages because of the cross-coupling effects between two axes as shown in figure 2. For high performance speed control, d- and q-axis current regulators with the decoupling feedforward compensation need to be applied. For more details see Figure 3.
{kind=link}

Figure 3.
The d-axis reference current i*d is set to zero in order to maximize the torque-to-current ratio of the IPMSM. The q-axis reference current i*q is obtained from the speed error through the speed regulator as shown in Figure 3. The outputs of the current regulators provide the reference voltages in the rotating reference frame. In the block diagram of Figure 3, the feed forward terms, ed and eq, used for the decoupling control, are given by:
![]()
![]()
The two compensations (current control and voltage command) are, as described by Boussak, important factors to ensure stable and optimal control—enhancing the vector control and the flux weakening control.
The EKF is one of the most widely used approaches for tracking and estimation for nonlinear systems due to its simplicity, optimality, tractability and robustness. In order to achieve sensorless control of the salient pole IPMSM, EKF is used for the estimation of the speed and rotor position. The line voltages of the motor and the load torque are the vector input variable of the system. The speed and the rotor position are the two magnitudes to be estimated, and with the motor current, they constitute the state vector. The motor currents will be the only observable magnitude that constitutes the output vector.
For the implementation of an EKF for sensorless IPMSM drives, the choice of the two-axis reference frame is essential. The ideal case is to use the d- and q-axis rotating reference frame attached to the rotor. This solution is not compatible for IPMSM sensorless speed control because the input vector (currents and voltages) of the estimator are rotor position dependent. It has been observed in implementation that an error of estimation in the initial position of the rotor can have serious repercussions by inducing error in the progress of the EKF with regard to the real system.
In this case, Boussak advised to align the IPMSM control in the rotor reference frame. The speed and the position were estimated using only measurements of the stator voltages and currents. The EKF based observers use the motor model with quantities in the fixed reference frame α-β attached to the stator frame, and are therefore independent of the rotor position. The nonlinear dynamic state model of the IPMSM in a stationary reference frame was derived to complete the estimator:
![]()
The two stator currents, the electrical speed, and position are used as system state variables (more advanced calculation schemes can be found in Boussak’s work).
Deployment methods like those developed by Bon-Ho Bae and Boussak align the viability of sensorless controllers, introducing more advanced modeling into real-time motor control schemes. Over the last five years, microcontroller and DSP manufacturers have been highly focused on providing the sufficient performance and necessary capability via new types of embedded processors. These are the key factors that will enable designers to apply modern vector control in the real world.
Motor Efficiency Begins With The Processor
Today, we are at a stage where the enhancement of processors like Analog Devices new ADSP-CM40x ARM Cortex-M4 family are bringing price/performance balance to a level where implementations of more sophisticated motor control algorithms are starting to gain traction in higher volume solutions. Specifically in terms of processor capability—built-in digital filter functions, high performance floating point capability, and extended mathematical capability all allow more complex and combined algorithms to create a better controller and control scheme, pushing the efficiency of motor drives closer to 100%. Within the industry there is no doubt that the enhancement of multiple observer models running real-time model based estimators will help to enhance (i) performance of the drive, (ii) system efficiency and topology, and (iii) the deployment method of the design. Regarding (iii), graphical systems like MATLAB/Simulink® are today capable of easing the design flow and enhancing the development of new algorithms. These tools, together with the executing processors, enable a more complex deployment to be achieved. Processor-level enhancements related to core speed, analog-to-digital conversion resolution, and memory integration will afford designers the capability and precision to achieve greater quality and higher performance objectives while accelerating time to market.
With the recent introduction of ADI’s ADSP-CM40x series of mixed signal embedded controllers, significant processing performance gains have been achieved in parallel with price point reductions to bring DSP-caliber performance to motor control applications previously serviced by performance-constrained processors and microcontrollers. Motor system designers will leverage this performance profile to achieve greater system functionality and precision through the use of more advanced algorithms, which can be applied to accurately determine rotor shaft position and speed so as to eliminate the need for position/speed sensors in the system.
The ADSP-CM40x exemplify the aforementioned trend towards greater on-chip integration of components such as world class resolution ADCs for precise data conversion and modeling accuracy, and integrated flash memory to further speed algorithm processing – both of which minimize off-chip components and lower overall system costs. Processors offering an optimal blend of performance and on-chip integration enable designers to realize a number of system level design objectives, including real-time processing of more data, reduced latency, consolidation of processing tasks to a single processor, and greater flexibility to optimize system interface and control capabilities.
New technologies are today pushing a paradigm shift in motor system capability, balancing design topologies and processor attributes to achieve greater overall system performance and efficiency. High performing processors/DSPs enable modern and efficient control theory to be utilized in advanced system modeling, ensuring optimal power and control efficiency for any real-time motor system. The broad-based application of sensorless vector control is now within reach and promises to accelerate the global trend toward more energy efficient and higher performing industrial equipment.
About the Authors
Based in Denmark, Anders Frederiksen is the senior strategic marketing manager for robotics and emerging technologies in the Connected Motion and Robotics business unit at Analog Devices, Inc. Anders has over 25 years of i...
Related to this Article
Products
PRODUCTION
240MHz ARM Cortex-M4 with 13+ ENOB ADC, LQFP176
PRODUCTION
240MHz ARM Cortex-M4 with 13+ ENOB ADC, LQFP120
LAST TIME BUY
150MHz ARM Cortex-M4 with 11+ ENOB ADC, LQFP120
Industry Solutions
Product Categories




















