Voice and Acoustic Signal Processing

Voice and Acoustic Signal Processing Solutions
Analog Devices understands that an immersive, in-cabin audio experience is one of the primary differentiators in purchasing a car.
From infotainment to hands-free communication, with a person or with a machine—think Siri, Alexa, or OK Google—we have utilized its sophisticated IP to develop ADI LISTN™, a portfolio of high-performance microphone audio signal processing software solutions that fulfill the highest automotive industry standards.
Value and Benefits
- Fast Integration: Mature ADI LISTN IP enables quick tuning and reduced time to market.
- Flexible Deployment: Software supports any HW platform with low-latency, deterministic performance.
- Standards Compliance: Meets ITU-T p.1100–1140 and passes CarPlay/Android Auto certifications.
- Toolchain-Ready: Available in SigmaStudio®, CCES, and third-party CPU/SoC libraries.
Interactive Signal Chains

Click on the part for more details

Key Resources
Technical Articles
Audio Signal Processing Software Tools
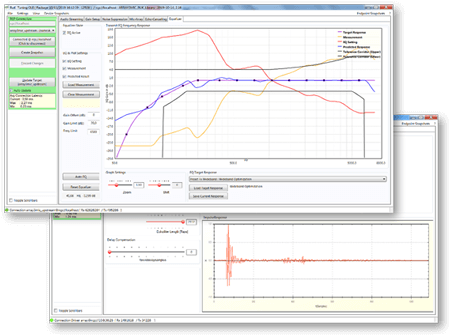
ADI LISTN Tuning Tool
The ADI LISTN tuning tool is a graphical user interface (GUI) that connects to the target via Ethernet, UART, or SPI. With the ADI LISTN automotive audio signal processing suite and its tuning capabilities, it is easy to create a system that passes the relevant automotive specifications such as ITU-T p.1100/1110/1120/1140 and Apple CarPlay.
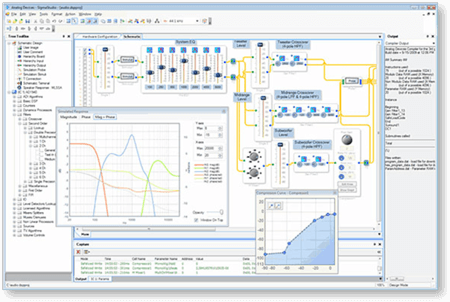
SigmaStudio
The SigmaStudio® graphical development tool is the programming, development, and tuning software for the SigmaDSP® and SHARC audio processors and A2B transceivers. Familiar audio processing blocks can be wired together as in a schematic, and the compiler generates DSP-ready code and a control surface for setting and tuning parameters.
CrossCore® Embedded Studio (CCES)
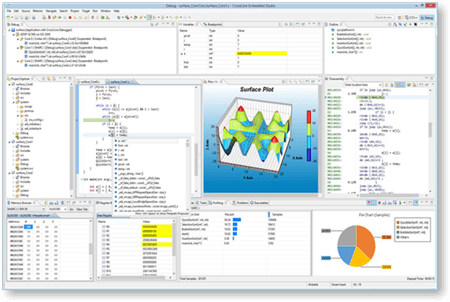
CrossCore Embedded Studio is a world-class integrated development environment (IDE) for the ADI Blackfin®, SHARC, and Arm® processor families. CCES also offers Blackfin and SHARC developers highly integrated add-in support for drivers, services, and algorithmic software modules.
{{modalTitle}}
{{modalDescription}}
{{dropdownTitle}}
- {{defaultSelectedText}} {{#each projectNames}}
- {{name}} {{/each}} {{#if newProjectText}}
-
 {{newProjectText}}
{{/if}}
{{newProjectText}}
{{/if}}
{{newProjectTitle}}
{{projectNameErrorText}}