汽车手势传感器的玻璃盖片和孔径设计
摘要:
本应用笔记为 MAX25205和 MAX25405 手势传感器的光学机械部分提供设计指南。基于红外(IR)技术的手势检测系统存在一个关键的设计问题,即 LED 到传感器之间的光学串扰(见图 1)。特别是当 LED、传感器安装在玻璃后面时,这种光学串扰会变得更加严重。光学串扰会大大降低手势检测范围。
从 LED 到传感器可以有几条路径产生串扰。这些路径包括:直接路径、反射路径和玻璃盖片的光反射路径。直接路径和反射路径产生的串扰很容易缓解,在LED 和传感器之间放置一个光学屏障就可以阻挡光线。玻璃盖片的光反射则很难克服。这种情况下,会在玻璃盖片下方,传感器和 LED 之间放置泡沫,利用泡沫吸收进入玻璃盖片的光线。泡沫还可充当传感器和 LED 的孔径。


有机玻璃的机械堆叠
图 2 显示了有机玻璃的机械堆叠,所使用的玻璃盖片是红外透射型有机玻璃。它能阻挡 750nm 以下的可见光,而 750nm 以上的光则能透过传输,产品型号为Plexiglas IR acrylic 3143。有机玻璃和 PCB 之间的聚氨酯泡沫是 Rodgers Poron 4701-30。该泡沫非常柔软,容易压缩。该材料用于吸收不需要的反射光、折射光和直射光。

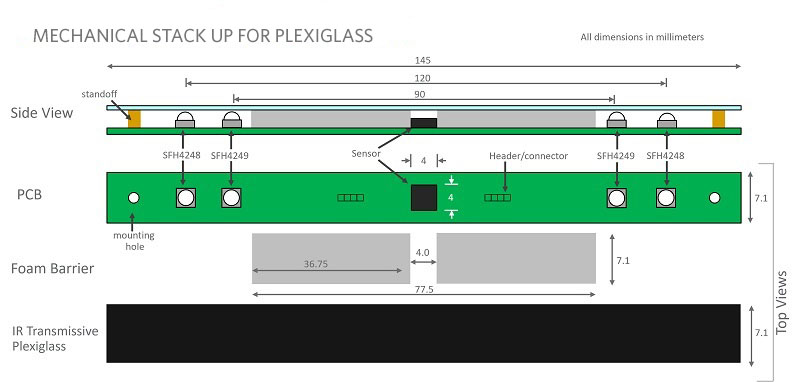
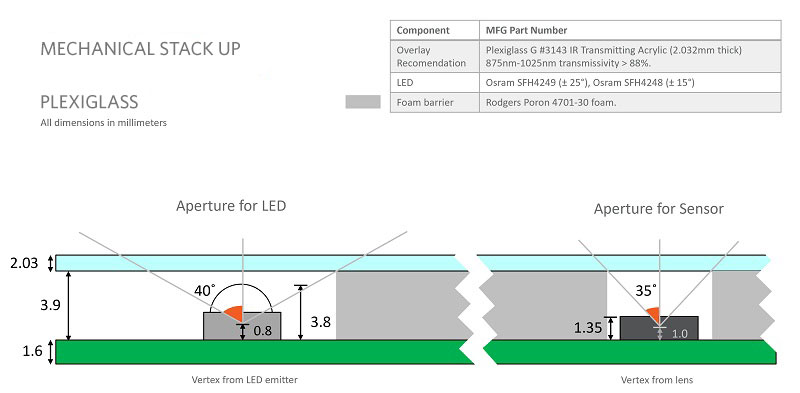
图 3 显示了 LED 和传感器周围部件的更多细节。传感器周围有一个 35 度的孔径,而 LED 周围有一个 40度的孔径。

玻璃的机械堆叠
图 4 显示了玻璃的机械堆叠。红外阻隔油墨用于形成孔径,而红外透射油墨则将 LED 和传感器隐藏在玻璃后面。

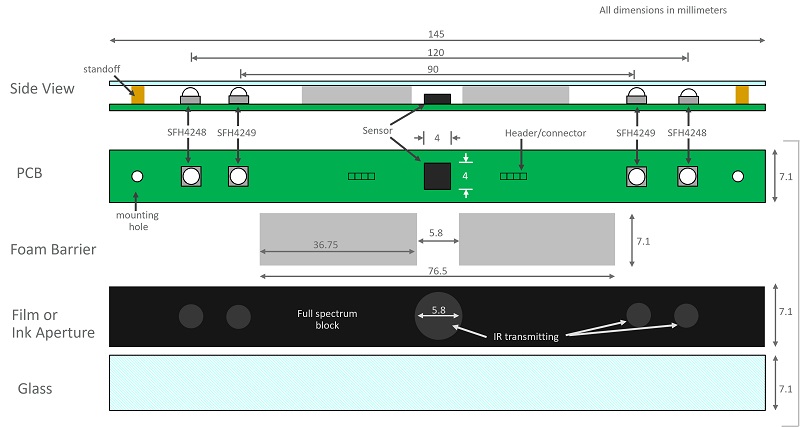
图 5 显示了 LED 和传感器的更多细节。传感器周围有一个 35 度的孔径,而 LED 周围有一个 40 度的孔径。红外油墨可用于形成孔径。红外透射油墨可用于隐藏LED 光。另外还可以使用红外透射膜,比如 3M 的传感器伪装膜 1921-CMBK。


关于作者
























