AN-1061: 存在随机抖动时鉴频鉴相器AD9548的特性
简介
AD9548是一款配有直接数字频率合成器(DDS)的数字PLL,其中DDS的作用相当于模拟PLL中的VCO。由于AD9548的数字特性,设计人员还可以实现数字鉴频鉴相器(参见图1)。
鉴频鉴相器的唯一用途是为用户指示PLL控制环路是否已达到符合锁定条件的状态。同样,鉴频鉴相器并不参与PLL的相位和频率采集过程,仅用作状态指示器。
AD9548数字鉴频鉴相器逻辑(DPFDL)具有两个输出信号。一个包含时间误差样本,构成基准电压与反馈沿之间的时间差异。另一个包含周期误差样本,构成基准电压与反馈信号之间的周期差异。
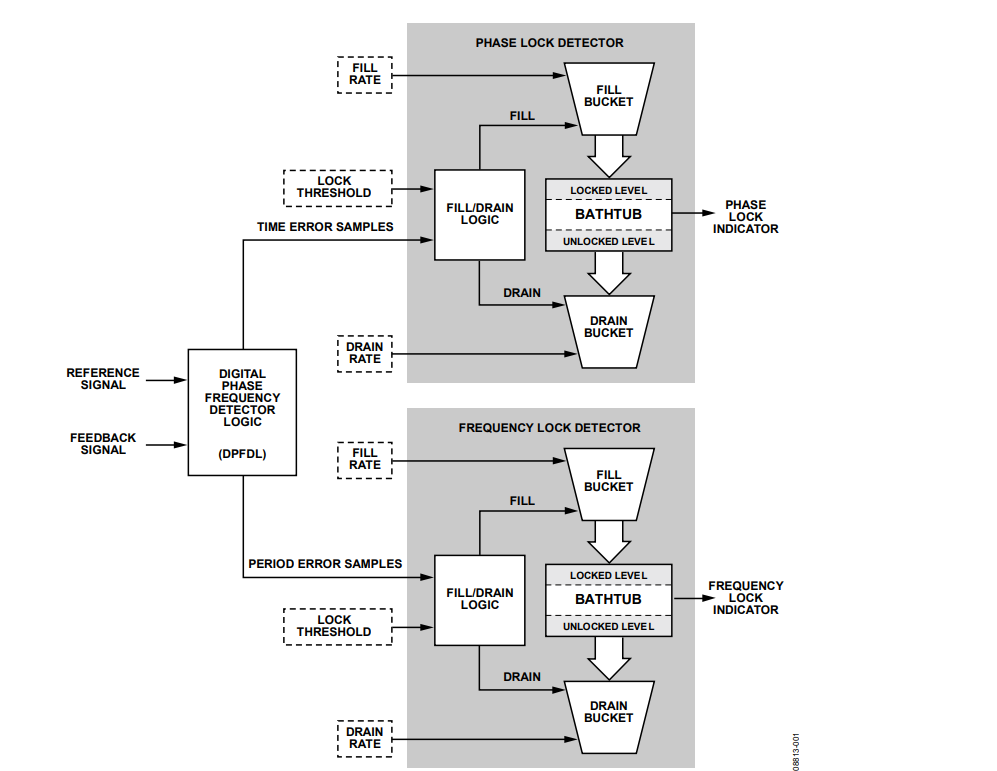
图1. AD9548鉴频鉴相器
本应用笔记的目的
AD9548鉴频鉴相器具有数字特性,因此可提供编程选项,比相应的模拟器件更加灵活。
然而,充分发挥其灵活性需要了解编程参数(锁定阈值、填充速率和流失速率)与输入信号抖动特征之间的关系,这正是本应用笔记的目的。
用浴盆模拟鉴频鉴相器
如AD9548数据手册所述,鉴频鉴相器类似于浴盆,用添水桶加水,或者用排水桶排水(参见图1)。浴盆可容纳4096加仑的水,且在¼和¾水位(分别代表−1024和+1024加仑,0表示½满)具有水位标记。
每当浴盆内水位达到或超过¾满,鉴频鉴相器指示锁定。相反,每当浴盆内水位降至或低于¼满,鉴频鉴相器指示失锁。
当浴盆内水位介于¼与¾标记之间时,鉴频鉴相器保留先前指示(锁定或失锁,视具体情况而定)。¼和¾标记为鉴频鉴相器提供了迟滞,因此在浴盆内水位接近¼或¾标记时,锁定/失锁输出信号不太可能发生震颤。
在PLL采集过程之初,浴盆以半满开始,鉴频鉴相器指示失锁。每当样本(时间误差或周期误差)在锁定阈值内,添水桶加水。每当样本在锁定阈值外,排水桶排水。
锁定阈值可按照添水桶和排水桶尺寸,分别通过填充速率和流失速率参数编程。桶尺寸可按1加仑增量在1加仑至255加仑范围内编程。请注意,鉴相器和鉴频器虽然相同,但具有独立的锁定阈值、填充速率和流失速率参数。
锁定阈值详情
锁定阈值是控制鉴频鉴相器的关键,因为它设置浴盆添加还是排除水的决策点。鉴频鉴相器连续测试DPFDL产生的每个样本,检查其在锁定阈值之内还是之外。如果样本在阈值内,将一添水桶的水加入浴盆。如果样本在阈值外,则从浴盆减去一排水桶的水。
鉴相器使用16位数字来建立锁相阈值,单位为皮秒(ps)。例如,假设DPFDL的输入频率为50 kHz,预期当DPFDL输入对齐度在1°内时鉴相器指示锁定。
这样便得出以下时间差异:
(1°/360°)/(50 × 103) = 55,556 ps
因此,
锁相阈值 = 55,556 ps
鉴频器使用24位数字来建立锁频阈值,单位为皮秒(ps)。
同样,假设DPFDL的输入频率为50 kHz,预期当DPFDL输入频率差异在10 Hz内时鉴频器指示锁定。这样便得出以下时间差异:
1/50,000 − 1/(50,000 + 10) = 3999 ps
因此,
锁频阈值 = 3999 ps
填充和流失速率详情
填充速率和流失速率参数控制鉴频鉴相器的响应能力,后者影响鉴频鉴相器在锁定和失锁指示间变换的速度。如前所述,添水和排水桶可通过编程设置为1至255加仑范围内的任意值。由于锁定(¾)与失锁(¼)水位间隔离,锁定指示与失锁指示间存在2048加仑的差异。因此,可通过编程桶尺寸设置涵盖锁定/失锁范围所需的最小桶数。例如,用255加仑的桶覆盖2048加仑范围至少需要9桶,而用1加仑的桶覆盖同样的范围至少需要2048桶(假定每个DPFDL样本对锁定阈值产生相同决策,始终添水或始终排水)。
然而在锁定采集过程之初,浴盆始终以半满开始,因此仅需要1024加仑就能从冷启动达到锁定或失锁水位。因此,从冷启动开始,用255加仑的桶覆盖范围至少需要5桶,而用1加仑的桶覆盖同样的范围至少需要1024桶(同样假定每个DPFDL样本产生相同决策)。
另一方面,如果鉴频鉴相器达到饱和(+2048加仑下满足完全锁定条件或−2048加仑下完全失锁条件),则饱和与替代指示间存在3072加仑差异。因此,用255加仑的桶覆盖3072加仑范围至少需要13桶,而用1加仑的桶覆盖同样的范围至少需要3072桶(同样假定每个DPFDL样本产生相同决策)。
显然,经编程的桶尺寸对达到锁定或失锁水位所需的DPFDL样本数具有显著影响。小桶使鉴频鉴相器响应迟缓,大桶导致鉴频鉴相器响应过快。AD9548鉴频鉴相器独特之处在于,它允许用户独立控制鉴频鉴相器指示锁定和失锁的响应能力。
请注意,以上段落假定每个DPFDL样本产生相同决策结果。现实中,输入信号因系统噪声出现抖动,这表示当DPFDL输出信号接近锁定阈值时,填充/流失决策可能带 来高噪声。如本应用笔记所述,这就是输入信号的抖动特性对锁定阈值、填充速率和流失速率的选择具有显著影响的原因。
通用PLL锁定采集过程
图2显示典型PLL采集锁相(图示顶部的蓝色线)条件下通用相位误差与时间关系图的示例。蓝线一开始(左至右)就显示存在周跳。这种情况可在基准电压与反馈频率间的差异相对较大时发生。
这种情况下,随着PLL逐渐将反馈频率向基准频率驱动,两者间的相位差异跨过鉴相器的±π限值,使其从+π跳至−π(反之亦然)。然而,当两个频率足够接近时,PLL能够将相位差异保持在鉴相器的±π限值以内。这将开始PLL的线性响应区域,逐渐迫使反馈和基准信号实现相位对准。
根据PLL的闭环动态,锁定过程可能出现响铃振荡,如图2上部通过零相位的蓝色线的多个偏移所示。最后,PLL环路能够将相位误差驱动至接近零,构成完整锁相。本应用笔记关注的领域是缩放框区域。
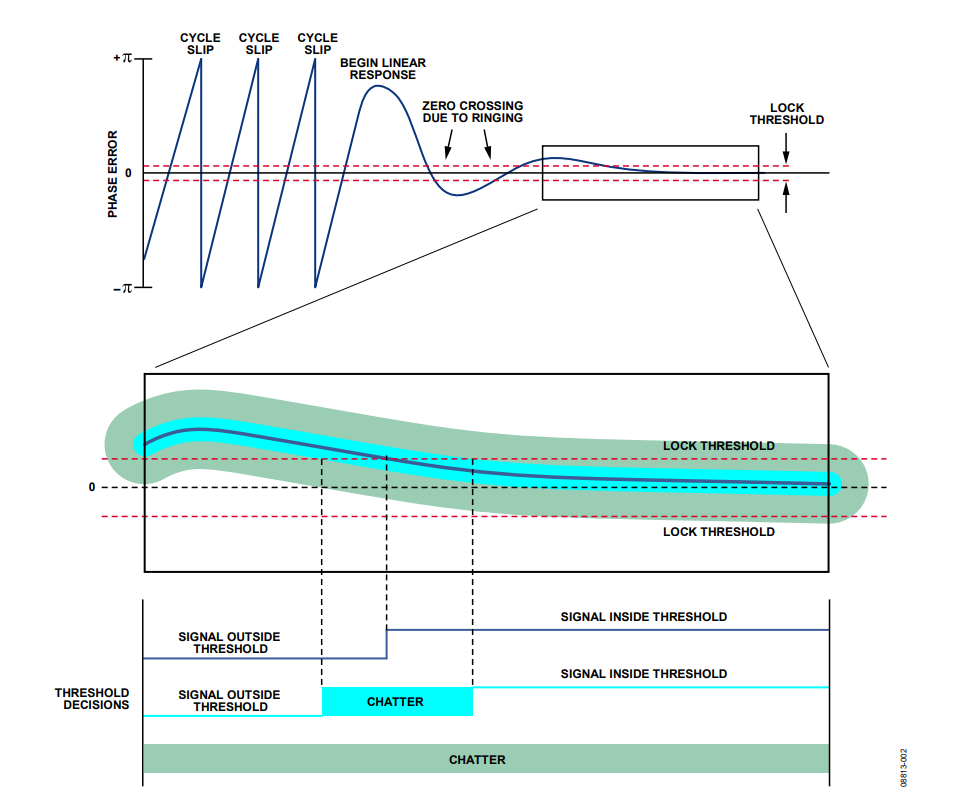
图2. 典型锁相采集过程
鉴频鉴相器必须能决定锁定与失锁条件间的差异。这意味着相位(频率)阈值能够让鉴频鉴相器区分两个条件。也就是说,当相位(频率)误差在阈值以内时,鉴频鉴相器应指示PLL处于锁定条件下。相反,当相位(频率)误差在阈值以外时,鉴频鉴相器应指示PLL处于失锁条件下。阈值显示为图2中的两条红色水平虚线。
图2中的缩放框显示由浅蓝绿宽线和更宽的浅绿线环绕的实心蓝线。蓝线代表理想无噪声系统的响应,而浅蓝绿和绿线代表叠加在理想蓝线上的抖动(噪声)。缩放框下方曲线显示鉴频鉴相器阈值决策结果。请注意,明确决策与无噪声(蓝)线相关。
不过,浅蓝绿线显示出信号越过阈值时由输入信号噪声引起的决策(震颤)间随机跳跃。更糟的是绿线,此时噪声峰值大于阈值。结果,越过阈值的持续随机偏移导致连续的决策震颤。显然,了解输入信号的抖动特征是选择适当锁定阈值的先决条件,如“输入抖动对选择锁定阈值和填充/流失速率的影响”部分所述。
输入抖动对选择锁定阈值和填充/流失速率的影响
锁定阈值与抖动的关系
如锁定阈值详情及填充和流失速率详情部分所述,锁定阈值表现为完全独立于填充速率和流失速率。但只有峰值输入抖动小于锁定阈值时才能单独处理锁定阈值。否则,DPFDL信号在阈值限值外的随机偏移会导致干扰性阈值外决策,甚至发生在PLL控制环路建立均衡之后。.
每个干扰性阈值外决策依次使鉴频鉴相器指示浴盆排水。即使PLL正常跟踪输入信号,高速率的干扰性阈值外决策可导致浴盆水位降至失锁水位。不利的结果是即使PLL环路处于均衡状态,鉴频鉴相器也将发出失锁条件信号。正是超过锁定阈值的抖动产生的干扰性阈值外决策,在锁定阈值与填充和流失速率间建立了相互依赖性。
该问题的症结在于,用户根据某些系统要求设置锁定阈值。例如,可能要求PLL在基准和反馈信号相差5°以内时指示锁相。这意味着将锁定阈值设置为对应于5°的值。不过,如果峰值输入抖动为10°,则5°阈值设置外出现大量样本且每个样本导致阈值外决策的可能性有限。无论干扰性阈值外决策如何,防止鉴频鉴相器产生错误失锁指示都会给锁定阈值、填充速率和流失速率值的选择带来限制。
一般而言,我们基于某些底层系统要求设置锁定阈值,如“锁定阈值详情”部分所述。不过,有两种情况需要考虑锁定阈值的选择,主要取决于相对于锁定阈值的均方根(σ)抖动幅度。
情况1:锁定阈值> 6 σ
情况2:锁定阈值< 6 σ
第一种情况下,锁定阈值足够宽,抖动峰值偏移很少超过阈值。第二种情况下,锁定阈值过窄,使得抖动峰值偏移频繁地超过阈值。由于σ值对设置可行的锁定阈值至关重要,因此最好查阅一下“附录:抖动环境下的正态(高斯)分布”部分,了解σ如何与锁定阈值相关。
填充和流失速率与抖动的关系
输入抖动的标准偏差也能够影响填充速率和流失速率的选择。通常,我们根据所需的鉴频鉴相器响应能力选择填充速率和流失速率。即较大值使鉴频鉴相器响应迅速,而较小值使鉴频鉴相器响应迟缓。填充速率控制鉴频鉴相器指示锁定条件的响应能力,而流失速率控制鉴频鉴相器指示失锁条件的响应能力。填充/流失比率η指示鉴频鉴相器倾向锁定还是失锁,其中:
η = 填充速率/流失速率
如果η = 1,鉴频鉴相器指示锁定或失锁条件的响应能力相等。如果η > 1,鉴频鉴相器对指示锁定条件的响应能力更强,而如果η < 1,鉴频鉴相器对指示失锁条件的响应能力更强。
当锁定阈值大于6 σ时,抖动不是问题(至少对于鉴频鉴相器),我们可以仅针对所需的鉴频鉴相器响应能力自由选择填充速率和流失速率。然而,当锁定阈值小于6 σ时,即使PLL已经建立完全均衡,抖动也会导致频繁出现随机阈值外决策。随机阈值外决策会导致浴盆比其他情况更快地排水。为抵消随机阈值外决策造成的过量排水,我们必须增加η,但问题是,增加多少?
如何调节填充/流失比率
考虑将M个样本的序列传递至鉴频鉴相器的情况。当PLL处于均衡状态且无抖动时,由于每个样本应在锁定阈值内,鉴频鉴相器应向浴盆添加M个添水桶的水。因此,M个样本序列在浴盆内产生的水净体积(V)如下:
VNoJitter = (M)((填充速率)
不过,如果抖动产生随机阈值外决策,则每个阈值外样本 从浴盆排除一个排水桶的水。M个样本导致排水的比例为 POUT, 这是样本超过锁定阈值范围的概率。同样,样本在 锁定阈值范围内的概率为 PIN, 它与 POUT 相关性如下所示:
POUT = 1 – PIN
如果已知抖动特征(μ和σ),则可使用“附录:抖动环境下的 正态(高斯)分布”部分的P(α,β)公式计算 PIN。得知 PIN ,便可 用公式表示存在抖动时由M个样本产生的净体积:
VJitter = (M)(PIN)(填充速率) − (M)(POUT)(流失速率)
= (M)(PIN)(填充速率) − (M)(1 − PIN)(流失速率)
请注意,由于 VJitter 包含流失成分而 VNoJitter不含,因此 VJitter 小 于 VNoJitter 。显然,必须为 VJitter选择更大的填充速率,才能 产生与 VNoJitter.相同的体积。新填充速率(NFR)使用变量,设 置VJitter = VNoJitter ,得到:
(M)(PIN)(NFR) − (M)(1 − PIN)(流失速率) = (M)(填充速率)
等式两边同时除以(M)(流失速率),得到:
(PIN)(NFR)/流失速率 − (1 − PIN) = 填充速率/流失速率
解出新填充速率(NFR):
新填充速率 = (填充速率/PIN) + (流失速率)[(1/PIN) − 1]
以上公式使我们可以调节无抖动填充速率,让鉴频鉴相器在抖动环境下像在无抖动环境中一样工作。不过,如果均方根抖动(σ)相对于锁定阈值过大,则干扰性阈值外决策的密度远远超过鉴频鉴相器浴盆可以排放至失锁水位的点,即使PLL已经建立完全均衡也会导致失锁指示。显然,一旦填充速率到达255,则不可能进一步补偿。事实上,如果填充/流失比例过于偏向任一方,鉴频鉴相器作为锁定/失锁指示器的使用价值就成问题了。
只要σ相对于锁定阈值不是过大,最合理的解决方案是为填充速率和流失速率选择可接受的最小值。σ必须小至何种程度才能让鉴频鉴相器完美运行没有简单的答案,因为锁定阈值η、μ和σ在决定填充速率和流失速率中均有作用。一般指导原则是,只要锁定阈值不小于½ σ(均方根抖动的一半),以上技术都可行。
样本应用的仿真:同步GPS(1脉冲/秒)
概述
该部分介绍样本应用(GPS同步),并说明在各种参数设置和条件下的鉴频鉴相器仿真。每次仿真包含50,000个DPFDL样本的序列,前10,000个样本仿真采集过程中的 PLL,其余40,000个样本仿真均衡状态的PLL。采集模型是衰减式指数,以锁定阈值的两倍开始,10,000个样本后完全衰减(参见图3)。
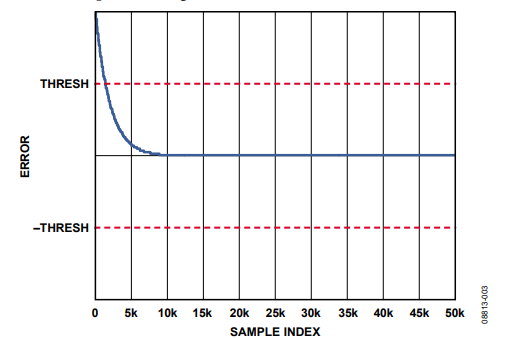
图3. 采集序列
本部分的仿真结果包括浴盆水位和最终锁定/失锁指示的曲线图。为便于比较,浴盆和锁定/失锁指示器仿真图各包含两条线,一条蓝色,另一条青色。蓝色线显示无抖动仿真结果,而青色线则显示施加抖动时的仿真结果。
由于GPS接收机输出速率为1脉冲/秒,50,000个样本等于50,000秒(近14小时)的鉴频鉴相器操作。请注意,仿真始终以浴盆半满开始。由于每次仿真的前10,000个样本模拟PLL采集过程,大约前1,400个样本的初始样本在锁定阈值以外。因此,浴盆在此期间排水,通常达到饱和失锁条件(空)。一旦采集过程充分衰减,由于信号降至锁定阈值内,浴盆开始添水。该初始排水和添水过程在每次仿真的第一部分出现。
请注意,典型GPS接收机呈现75 ns rms (σ = 75,000 ps)范围内的抖动。在此应用中,应将锁定阈值设置为最大值65.535 ns (65,535 ps)。这样才能确保锁定阈值大于½ σ。
现在,假设在无抖动环境中,用户需要鉴频鉴相器指示失锁条件的响应能力是指示锁定条件响应能力的两倍。即,η = ½。如果想让鉴频鉴相器具有适当的响应能力,填充速率和流失速率应分别选择25和50。
零均值抖动的浴盆水位仿真
图4显示鉴频鉴相器浴盆水位的仿真情况,填充和流失速率分别为25和50。对于抖动线(青色),抖动幅度为75 ns rms。请注意,存在抖动时,由于与其他抖动引起的阈值外决策相关的过量排水事件,鉴频鉴相器响应明显迟滞。
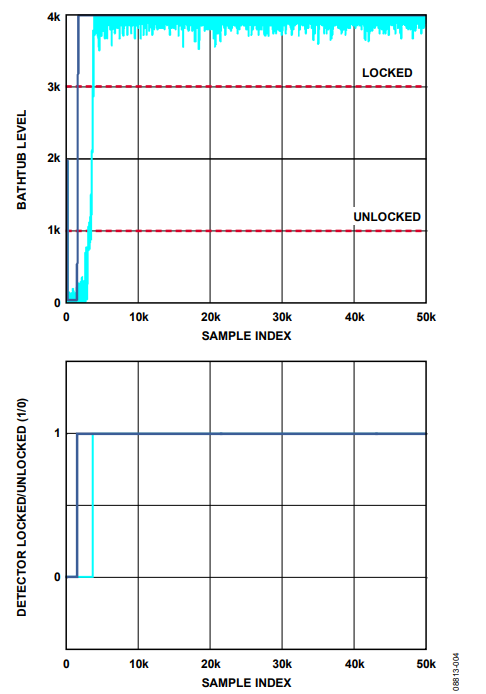
图4. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 0 ps, 填充速率= 25,流失速率= 50
鉴频鉴相器响应迟滞清楚表明,需要找到新填充速率来抵消抖动引起的浴盆排水。第一步先确定 PIN值,假定μ = 0 ps(零均值抖动)。使用“附录:抖动环境下的正态(高斯)分布”部分所述的P(α,β)公式,α = −65,535 ps(负锁定阈值),β = +65,535 ps(正锁定阈值),σ = 75,000 ps,并且μ = 0 ps,得 到:
PIN = P(α,β)
= P[(β – μ)/σ] − P[(α − μ)/σ]
= P[(65535 − 0)/75000] − P[(−65535 − 0)/75000]
= 0.61777
这表示38%的时间(100% − 62%)发生了干扰性阈值外决策。事实上,鉴于我们的零均值假设,这还是最好情况。在非零均值情况(μ ≠ 0)下,干扰性阈值外决策百分比大于计算的38%。
接下来,将 PINN应用于公式,计算新填充速率。
新填充速率= (填充速率/PIN) + (流失速率)[(1/PIN) − 1]
= (25/0.61777) + (50) [(1/0.61777) – 1]
= 72 (舍入至最近的整数值)
图5显示相同的仿真,只不过填充速率为72,流失速率为50。
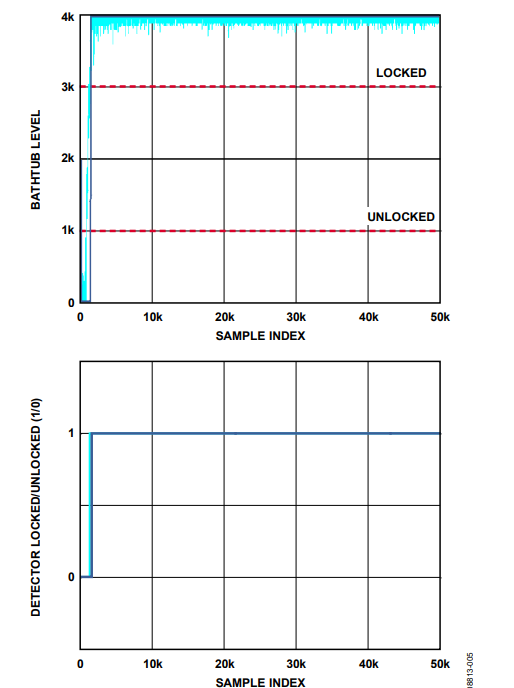
图5. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 0 ps, 填充速率= 72,流失速率= 50
应注意,新填充值使得鉴频鉴相器响应接近理想(无抖动)响应。增加的填充速率(72相对于25)有效抵消了与抖动引起的阈值外决策相关的过量排水事件。不过,请记住,鉴于零均值假设,这只是最好情况。由于PLL尝试跟踪漂移输入信号,因此零均值假设不再有效。
非零均值抖动的浴盆水位仿真
现在,假设输入漂移导致均值抖动偏移多达锁定阈值的 50%,即μ = 32,768 ps。非零μ值会直接影响 PIN值。使用附 录中的P(α,β)公式,α = −65,535 ps(负锁定阈值),β = +65,535 ps(正锁定阈值),σ = 75,000 ps,并且μ = 32,768 ps, 得到:
PIN = P(α,β)
= P[(β − μ)/σ] − P[(α − μ)/σ]
= P[(65,535 – 32,768)/75,000] − P[(−65,535 –
32,768)/75,000]
= 0.57393
这表示与μ = 0 ps时的38%相比,42%的时间(100% − 58%)发 生了干扰性阈值外决策。
图6显示使用原始填充速率和流失速率值(分别为25和50)的 仿真结果,但μ = 32,768 ps。

图6. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 32,768 ps, 填充速率= 25,流失速率= 50
鉴频鉴相器响应因阈值外决策概率略微增加(38%至42%)而急剧变化。事实上,鉴频鉴相器显示数个错误失锁指示,这是抖动均值偏移(μ = 32,768 ps)的直接结果。请注意,均值信号电平仍在锁定阈值(32,768 ps相对于75,000 ps),内,但抖动造成频繁的锁定阈值外干扰性偏移,从而产生无关的阈值外决策。
为补偿这些过量阈值外决策,计算新填充速率(使用 PIN = 0.57393)。
新填充速率= (填充速率/PIN) + (流失速率)[(1/PIN) − 1]
= (25/0.57393) + (50)[(1/0.57393) − 1]
= 81 (舍入至最近的整数值)
图7显示相同的仿真,只不过填充速率为81,流失速率为50。再次注意,新填充值使得鉴频鉴相器响应接近理想(无抖动)响应。增加的填充速率(81相对于25)有效抵消了与抖动引起的阈值外决策相关的过量排水事件,即使抖动均值偏移了32,768 ps。
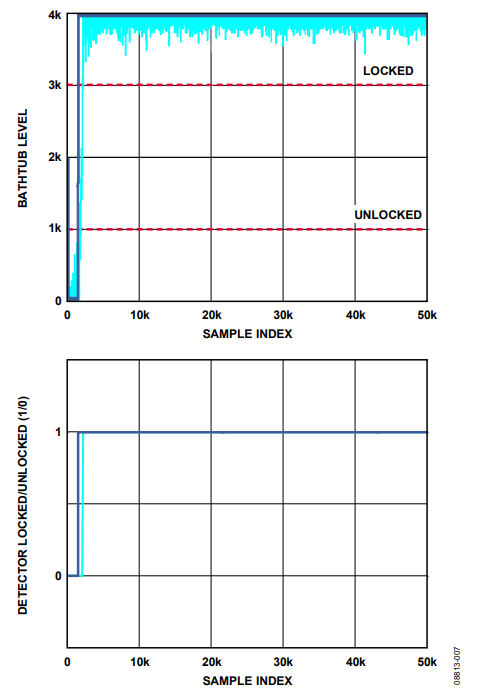
图7. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 32,768 ps, 填充速率= 81,流失速率= 50
具有非零均值抖动的最低响应鉴频鉴相器的浴盆 水位仿真
最低响应鉴频鉴相器尽可能对填充速率和流失速率使用最小值。例如,考虑以上仿真中的相同参数(所需原始比率η = ½,锁定阈值= 65,535 ps,σ = 75,000 ps,并且μ = 32,768 ps)。η = ½的最低响应鉴频鉴相器意味着填充速率为1,流失速率为2。
图8显示了最终鉴频鉴相器响应。请注意,填充速率为1时,鉴频鉴相器无法克服额外抖动引起的阈值外决策。甚至在50,000个样本后,浴盆水位仍远低于失锁指示水平,鉴频鉴相器无法指示锁定条件。
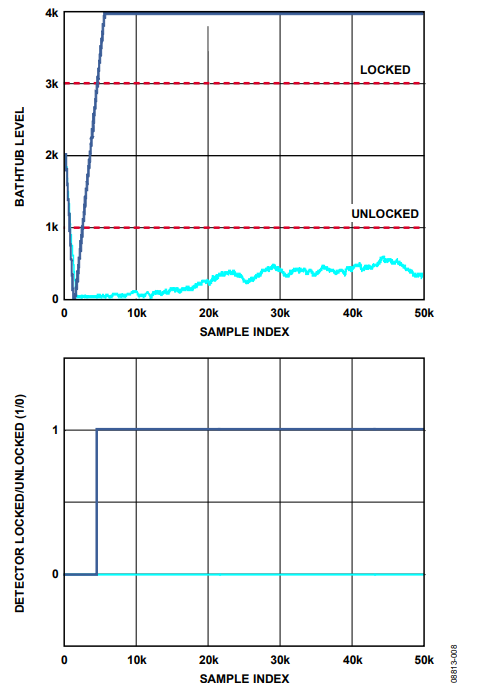
图8. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 32,768 ps, 填充速率= 1,流失速率= 2 。
由于μ和σ相同(参见“非零均值抖动的浴盆水位仿真”部分), PIN值相同(0.57393)。对新填充速率应用此公式,得 出填充速率为4(舍入至最近的整数值)。
图9显示补偿响应(填充速率为4)。同样,注意鉴频鉴相器响应接近理想响应。浴盆不仅重新添水,而且速率与无抖动条件相当(蓝色线)。
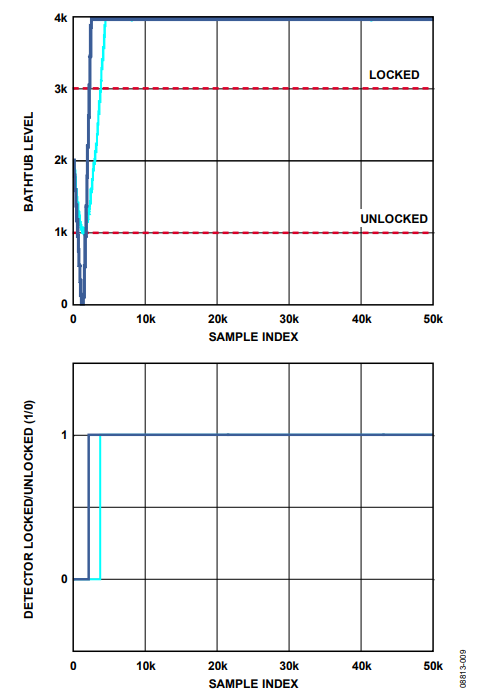
图9. 仿真:锁定阈值= 65,535 ps,σ = 75,000 ps,μ = 32,768 ps, 填充速率= 4,流失速率= 2
结论
虽然在努力补偿抖动引起的阈值外决策,但仿真结果显示,对无抖动和抖动输入信号的锁定检测指示时间似乎存在差异。例如,鉴频鉴相器指示锁定的时间对无抖动和抖动输入信号略有不同。此外,随着浴盆水位向锁定水平标记上升,抖动线(青色)斜率往往比无抖动线(蓝色)平缓。
存在差异的原因是,前10,000个样本构成PLL采集过程,在此期间μ大于计算 PIN时使用的值。如前所述, PIN计算中假定PLL已建立均衡。因此,采集过程中的抖动统计不同于均衡状态,新填充速率值在采集过程中不能正确补偿。这样,使用浴盆模拟,在采集过程中流入浴盆的净水量与预期量有所偏差。结果,鉴频鉴相器指示锁定所耗费时间发生变化(由于采集过程中抖动统计倾向于过度阈值外决策,通常时间会延迟)。显然,PLL均衡时,计算的新填充速率值正确补偿了过度抖动引起的阈值外决策。仿真中锁定指示时间发生明显变化只是采集过程的假像,并不是确定新填充速率程序中的瑕疵。
本文介绍的鉴频鉴相器仿真同样适用于鉴相器和鉴频器。唯一差异是两者处理的样本性质不同。鉴相器处理的是时间误差样本,而鉴频器处理的是周期误差样本。除了输入样本性质,鉴相器和鉴频器的功能相同。
AD9548鉴频鉴相器的灵活性允许我们独立定制鉴频鉴相器对锁定和失锁条件的响应。另外,如果知道基准输入信号的抖动统计特性,本应用笔记介绍的方法也可用于修改鉴频鉴相器响应,以补偿抖动的不利影响。尽管本应用笔记重点说明高斯分布抖动,但只要了解输入抖动的统计特性,本文所介绍的概念也可延伸至其他分布(例如均匀分布)。
附录:抖动环境下的正态(高斯)分布
一般而言,可以假定随机抖动遵循熟知的正态分布。这是因为系统内存在加成性白高斯噪声(AWGN),所以随机抖动通常更合理。
用两种参数描述正态分布:分布均值(μ)和标准偏差(σ)。图10显示了该分布。存在抖动时,x轴代表相位误差样本,其与理想无噪声值偏差某一随机量。分布常常具有零均值(μ = 0),从而产生零均值正态分布(参见图11)。σ(任一情况下)表示曲线下68%的总面积都在x = ±σ之间。请注意,正态分布峰值位于x = μ,样本比端点附近更可能具有接近μ的值。
正态分布的概念引出正态分布的累积概率。累积概率P(α,β)是特定样本在该分布的x轴上处于两个任意值(α和β)之间的概率,其中:

该积分无闭式解,必须使用数值法评估。或者,可使用函数P(z),即标准正态累积分布函数,本文献中提供了大量表列值。
函数形式如下:
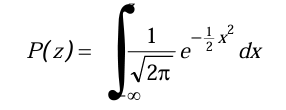
P(α,β)针对P(z)可表示如下(其中α < β):

请注意,除非σ和μ值已知,否则P(α, β)公式并无用处。幸运的是,通常可假定μ = 0,而σ恰好与抖动的均方根(rms)值相同。
该假设很方便,因为PLL通常工作于必须满足政府要求或工业标准(例如SONET)的系统内。此类情况下,标准可能对输入信号存在的抖动量带来限制。例如,标准可能规定输入抖动应小于100 ps rms,这意味着σ不得大于100 ps。另一方面,可将输入抖动规定为峰值不得大于2 ns。
通过以峰值抖动值的六分之一替代σ值来转换峰值规格通常是安全的。因为样本超出±6σ区域的概率约为1比500,000,000(几乎不存在)。因此,2 ns峰值规格意味着可以安全地假定σ最高为2 ns的1/6,即667 ps。
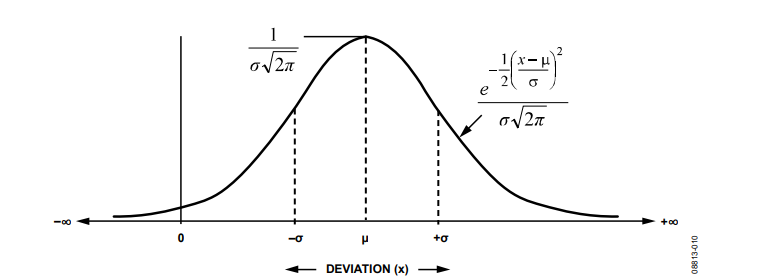
图10. 正态分布

图11. 零均值正态分布
有时,我们无法得知输入信号的抖动特征。这种情况下,必须通过测量决定σ值,或者进行合理推测。
举例来说,考虑锁定阈值设置为7.5°的情况,已知抖动为零均值(μ = 0),标准偏差为5° (σ = 5°)。注意7.5°等于1.5 σ。鉴相器样本在±7.5°锁定阈值范围内(即α = −7.5°且β = 7.5°)的概率为

这里P(1.5)的值来自标准正态累积分布的表列值。由于大多数表格仅列出正z值,应使用关系式P(−z) = 1 – P(z)处理负z值,以上计算显示,鉴相器样本在±7.5°间的机率是87%。图12是该示例的直观表示,阴影区域指示锁定阈值范围(±7.5°或±1.5 σ)。点代表随机样本的时间序列。注意,样本倾向于在±σ内群集,与预期相符。
现在,考虑相同示例,这一次抖动是非零均值。均值为+7.5° (μ = 7.5°)。鉴相器样本在±7.5°锁定阈值范围内(即α = -7.5°且β = 7.5°)的概率为

这里,P(0)和P(3)的值来自标准正态累积分布的表列值(同样使用关系式P(−z) = 1 − P(z)处理负z值)。注意,μ = 7.5°时,样本在±7.5°之间的机率为50%,而μ = 0°时概率为87%。图13是直观表示形式,阴影区域指示锁定阈值范围(±7.5°或±1.5 σ)。注意,样本仍倾向于在±σ内群集,与预期相符,但整个群组与零偏移μ(此例中为7.5°或1.5 σ)。

图12. 零均值相位误差序列
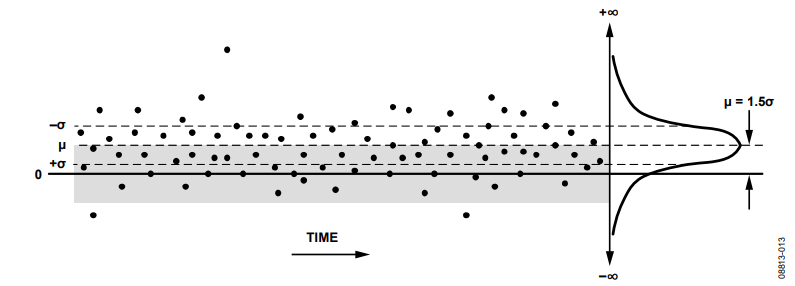
图13. 偏移μ的相位误差序列
作者
