AN074:MAX14914PMB 配合 TMCM-0960-MotionPy 使用
简介
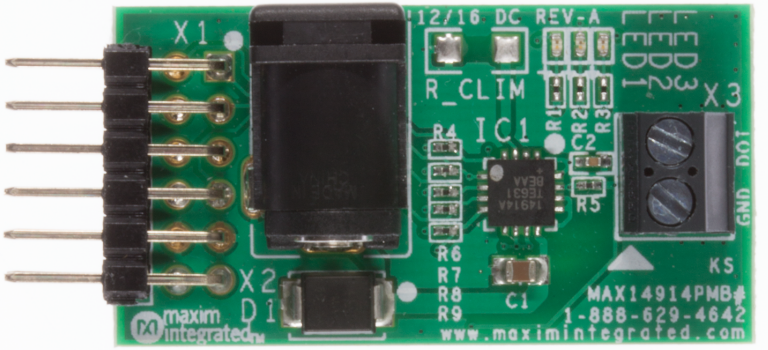
MAX14914PMB[1]提供用于评估 MAX14914[2]高边/推挽驱动器的硬件,该驱动器可用作工业数字输出(DO)和工业数字输入(DI)。有关更多信息,请参阅 MAX22190[?]产品页面。MAX14914PMB 可以与 TMCM-0960-MotionPy V2.X[4]一起评估。因此,一些基本函数已经利用 Python 实现,以便在 MicroPython 环境中使用此设置。本文将简要介绍如何启动示例并使用该模块的基本功能。
要求
- 按照 AN061[3]所示设置 TMCM-0960-MotionPy [4]
- 端口连接到 TMCM-0960-MotionPy
- 连接 MAX14914PMB[1]
- 24V DC 电源
连接 PMOD 板
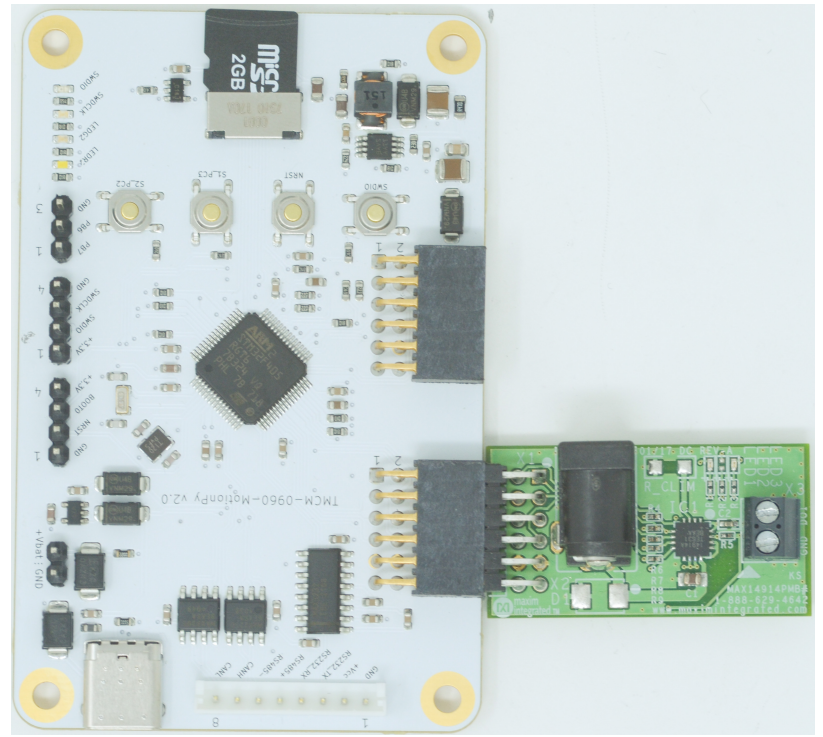
有多种方案可将 MAX14914PMB 连接到 TMCM-0960-MotionPy[4]。在默认配置中,MAX14914PMB 连接到TMCM-0960-MotionPy V2.X 上的 PMOD-0 连接器。该设置如图 2 所示。对应的引脚参见表 2。

| MAX14914PMB | 引脚 | 说明 | ||
| DO_SET | A5 | 开关控制输入 |
||
| DO_PP | A6 | 推挽 DO 或 DI 类型选择输入 | ||
| DI_ENA | A7 | 数字输入模式逻辑使能输入 | ||
| DIDO_LVL | A4 | 开漏 DOI 电平输出 | ||
| FAULT | C6 | 开漏故障输出 | ||
| OV_VDD | B0 | 开漏过压输出 | ||
结构和函数
芯片通过驱动相应的引脚直接寻址。为了方便使用,有些函数已在 max14914.py[5]中实现。使用函数 setIOMode(mode)、setPPMode(mode)和 setDO(state)来设置引脚。用于读取模块的函数有 getDIDO_LVL()、getFault()和 getOV_VDD()。这些函数的功能一目了然,只需查阅其注解即可明白。
运行示例
开始使用时,您可以尝试运行两个示例 max14914pmb_input.py[6]和 max14914pmb_output.py[6]。示例 max14914pmb_input.py[6]将模块配置为输入并读取当前状态。首先将 MAX14914PMB 连接到 MotionPy 板。再将电源和负载接入 MAX14914PMB 端口。然后将 MotionPy 连接到 PC 并启动端口连接。如果将 MAX14914PMB连接到 TMCM-0960-MotionPy 上的 PMOD-0,则只需运行脚本即可。否则,请打开示例脚本并编辑配置。可以使用以下命令启动示例脚本:
exec ( open (" PyTrinamicMicro / platforms / motionpy2 / examples / modules / max /
,→ max14914pmb_input .py") . read () )
现在,脚本应该以如下结构将输入的读出信息打印到终端。
Input state : x ; Fault state : x ; OV_VDD : x
第二个示例 max14914pmb_output.py[6]演示 MAX14914PMB 用作数字输出。脚本将模块配置为输出并定期切换 状态。首先如之前所述,设置 MAX14914PMB 和 MotionPy。可以使用以下命令启动示例脚本:
exec ( open (" PyTrinamicMicro / platforms / motionpy2 / examples / modules / max /
,→ max14914pmb_output .py") . read () )
现在,模块的输出应该会交替开启和关闭。终端应显示如下结构的当前状态信息。
Output state : x ; Fault state : x ; OV_VDD : x
请尽情探索 MAX14914PMB 的各项特性,并随意修改和扩展脚本。
参考电路
[1] MAX14914PMB product page: www.maximintegrated.com/en/products/power/mosfet-drivers-controllers/MAX14914PMB.html
[2] MAX14914 product page: www.maximintegrated.com/en/products/power/mosfet-drivers-controllers/MAX14914.html
[3] Application Note AN061-TMCM_0960_Module: www.trinamic.com/products/modules/details/tmcm-0960-motionpy/
[4] TMCM-0960-MotionPy product page: www.trinamic.com/products/modules/details/tmcm-0960-motionpy/
[5] Path to max14914.py: PyTrinamicMicro/platforms/motionpy2/modules/max/max14914.py
[6] Path to max14914pmb_input.py: PyTrinamicMicro/platforms/motionpy2/examples/modules/max/max14914pmb_input.py
[7] Path to max14914pmb_output.py: PyTrinamicMicro/platforms/motionpy2/examples/modules/max/max14914pmb_output.py