AN-053: TMC4671 PI Tuning
本用逐步介如何使用 USB-2-RTMI(RTMI) 一步一步调试 TMC4671。 通讯转换器是采用基于 FTDI FT4222H 高速 USB 转 SPI 桥路。 采用 USB 供电带有一个小巧的 10 引脚接头和 TMC4671-EVAL 的 RTMI 接口引脚相同,且具有相同的引分配可以在 TMC4671 估板上找到。TMCL- IDE提供软件工具用于调试不同控制环路。因此,RTMI 是调试,监控和系统配置的最简便的方式。
Items Used
- 直流无刷伺服电机, (e.g. QBL4208)
- TMC4671-EVAL-Kit
- USB-2-RTMI
- 注意: USB-2-RTMI_V20 包括电隔离,仅适用于 TMC4671-LA
- TMCL-IDE (3.0.24)
- 电源(24V)
- Micro-USB通讯线缆
- Mini-USB通讯线缆






USB-2-RTMI Driver Installation
参考 USB-2-RTMI指南 完成驱动安装。
Basic Configuration
在使用调试工具之前,必须先配置 TMC4671(例如,使用TMC4671 Wizard)。


在完成基本的参数配置之后,可以保存为C代码或.tpc脚本
- 在摘要中 (Summary) 选择ABN编码器
- 使用Export Script 导出脚本
Tuning
Overview
TMC4671支持三种主要的操作模式,它们需要进行PI配置::
- current/torque mode - 电流/力矩模式
- velocity mode - 速度模式
- position mode - 位置模式
每个模式都可以通过PI对每个环路进行调试。如下图概述:




这是一个串联的环路,因此外环依赖内环的调优。例如,在使用速度环之前必须先配置电流环。为每个PI控制 器的调整提供了软件工具。在TMCL-IDE中,可以通过 Tuning Group 访问这些调试工具 调整工具包括:
- Biquad tuning: 用于过率每个循环的目标值
- Torque/Flux tuning: 通过开环阶跃响应识别PI参数
- Step response: 适应所有控制回路的闭环阶跃响应
- Bode plot: 所有环路的波特图
- IC scope: 监控,读出寄存器值与PWM频率
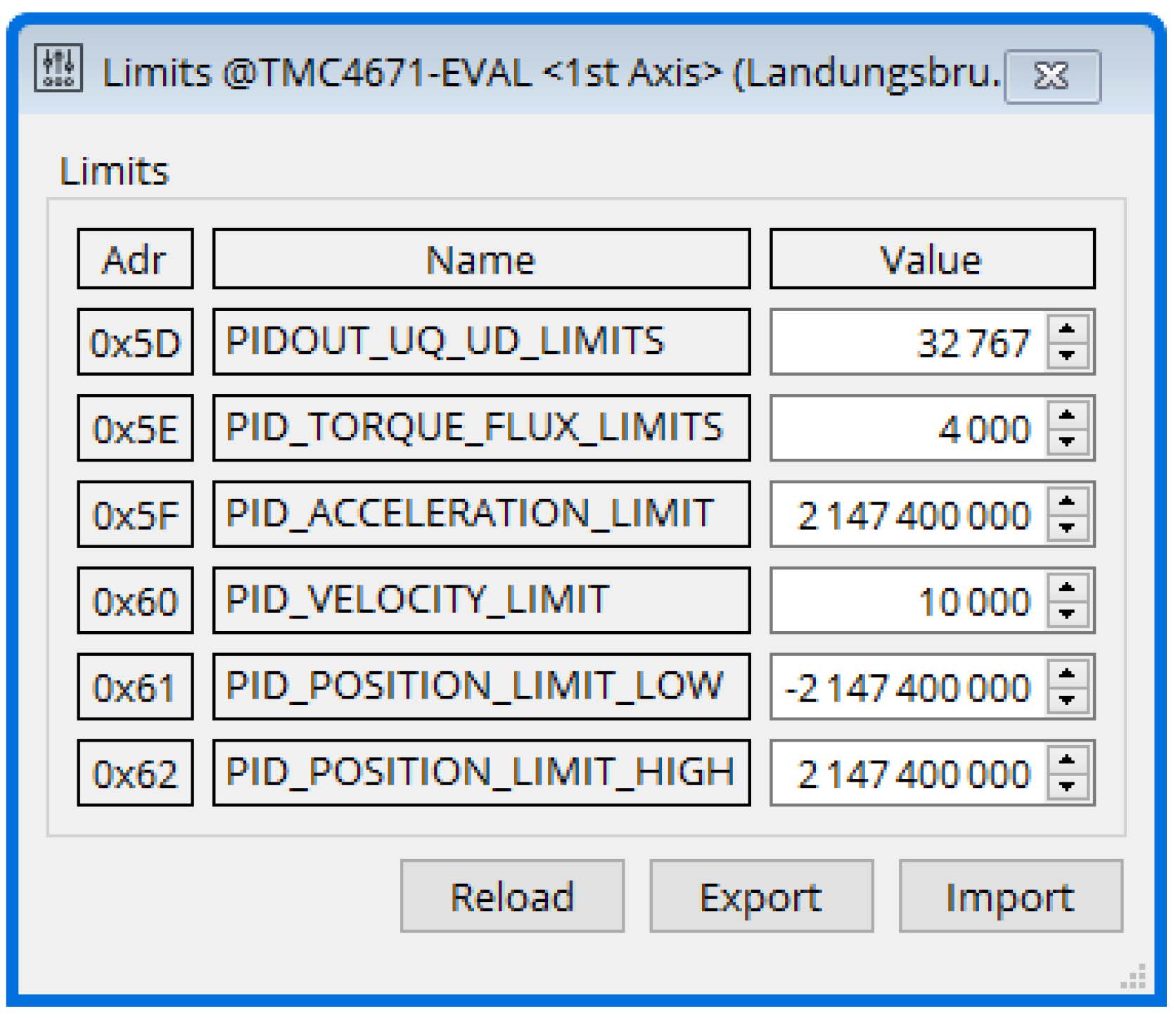
Limits
在使用调试工具之前,建议将输出电压设置为最大 (设置 PIDOUT_UQ_UD_LIMITS = 32767 置)。 对于步进来说默认值就可以了。
- 将 PID_TORQUE_FLUX_LIMITS 设置为应用中所允许的最大电流数值。
- 设置 PID_POSITION_LIMIT_HIGH = 2 147400 000
- 设置 PID_POSITION_LIMIT_LOW = -2 147400 00

Tuning of the Current Loop
电流环由两个控制环路组成:一用于扭矩(电流),另一用于磁通(电流)。都可以使用RTMI工具在 Torque Flux / Tuning 工具 和 Step response 工具调整。Torque转矩/Flux磁通工具在开环模式下确定PI参数。
Torque/Flux Tuning Tool (Open Loop)
Torque Flux调试工具会通过识别电机参数自动确定PI参数的起始值。在此过程中,设置电压阶跃并评估电流阶跃响应.只有磁通量电流被激发到最小/在这个调整阶段没有运动。建议使用25kHz的PWM频率以获得最好的识别结果.
- TMC4671-EVAL连接到RTMI和PC。
- 打开 “Torque/Flux Tuning Tool”。
- 单击 “Start”按钮开始整定


Figure 8: 配置和开始阶跃响应 - 给出了电流对电压阶跃的响应,以及系统的辨识结果


Figure 9: 第一步反 - 检查和手动调整Y范围,以获得更好的视图
- 单击“Start”按钮重新识别系统,如果电机匹配一致,将会给出更好的识别结果
- 如果需要,调整所需要的电脑显示窗口。在大多数情况下,默认设置将提供良好的结果。 - 动态阶跃响应被涵盖在识别区(虚线框内)
- 动态阶跃响应应覆盖在识别区域(虚线框)中


Figure 10: 调整 Y 范围 

Figure 11: 阶跃响应:识别区域好 - 在图 12 阶跃响应没有完全涵盖.识别区域太小。


Figure 12: 阶跃响应:标识区域太小 - 在图 13 中,标识区域太大


Figure 13: 阶跃响应:识别区域太大
- 动态阶跃响应应覆盖在识别区域(虚线框)中
- 将识别出的PI值写入当前控制器
- 使用以下按钮将 PI 值更新到电流控制器


- 注意:对于非常高的值标识 I-parameter显示为0. 在这种情况下,需要手动设置I参数 (如.设置18000)。
- 用PI控制框确认新的 PI 值.必须使用 Reload 按钮更新值。


Figure 14: PI-Parameters








Step Response Toolbox (Closed Loop)
在前一步中,力矩/磁通电流环的PI参数是在开环模式下被识别到的. 现在,阶跃响应工具将用于分析闭环行为
- 打开 Step response toolbox


Figure 15: step response toolbox - 配置电流控制的磁通电流设置
- 目标值/Target value: 0x64 PID_FLUX_TARGET
- 测量值/Measurement 1: 0x69 PID_FLUX_ACTUAL
- 采样频率/Sampling rate: PWM
- 下一步骤
- 设置 Start value = 0
- 确定最终的磁通量 flux target current 目标值(这里数值4000)
- 使用 Start 按钮启动阶跃响应step response
- 实际电流和目标电流显示出来


- 降低采样率以获得更好的效果


- 通过修改不同的 P 和 I 优化性能
- 从步骤 2 开始重复,修改 PID_TORQUE_TARGET, PID_TORQUE_ACTUAL。



Bode Plot
波特图工具用于确认电流环动态性能。
- 打开 Bode Plot
- 选择 1: torque control loop
- 开始 measurement 通过单击 Start 按钮 (其他设置保持默认值)
- 对比的例子: 下面 2 个测量显示调节和没有调节使用默认 PI 参数下的波特图.
- 默认 PI 数


Figure 16: PI 参数 

Figure 17: 默认 PI 的波特图 - 调整 PI 参数


Figure 18: PI 参数 

Figure 19: 调整过PI之后的波特图 - 调谐PI后的控制系统具有较高的截止频率,因此具有较高的动态性能




Tuning of the velocity loop.
这个章节介绍速度环调节. 前提条件是电流环已经被调节完成。为了调整速度环 PI 参数,请使用 step responsetool (closed loop) 闭环阶跃响应工具.
- 对于以下步骤,PHI_E_SELECTION (0x52) 不应设置为 phi_e_openloop。手动设置或通过 TMC4671Wizard 进行正确配置。
- 为了方便速度单位确认. 在 Selectors toolbox 里的 VELOCITY_SELECTION(0x50) 需要从 phi_e_selection设置为 phi_m_abn。


Figure 20: Selectors: Velociy Unit 选择 - 速度单位 - phi_m: 机械速度显示和计算的单位是RPM(每分钟转数)
- phi_e: 电气速度显示和计算的单位是电周期
- 设置速度环的 PI 参数
开始时设置一个比较低的 P数值; set I = 0 - 0x58: PID_VELOCITY_I = 0
- 0x58: PID_VELOCITY_P = 100
- 打开 Step Response tool box
- 使用阶跃响应的实例配置
- 单击 Start 按钮开始阶跃响应


Figure 22: PID_VELOCITY_P = 100 - 逐渐增加 PID_VELOCITY_P, 直到实际速度 (PID_VELOCITY_ACTUAL)达到 50-75%目标速度 (PID_VELOCITY_TARGET)


Figure 23: PID_VELOCITY_P = 300 

Figure 24: PID_VELOCITY_P = 500 - 增加PID_VELOCIT_I 数值直到实际速度达到目标速度


Figure 25: PID_VELOCITY_I = 10 

Figure 26: Selectors: Position unit








Tuning of the position loop
本章节介绍位置环调试,在使用位置环之前 电流环和速度环需要先被配置好,使用阶跃响应工具来调试,然后使用开发板套装的MCU板 Landungsbruecke 用于提升动态性能和精度。
Step Response Tool
- 将 POSITION_SELECTION 设置为 phi_m_abn
因此电机的一圈脉冲数为 65535 counts
- 设置 PI 位置控制器的初始值
- PID_POSITION_I = 0 (f(对于大多数设置,建议将此设置为0)
- PID_POSITION_P = 10


Figure 27: PI parameter - 打开 step response tool
- 单击 Start 按钮开始阶跃响应。电机会以 end value 值来回运动. 这里是 1 转
- PID_POSITION_P = 10 时电机不运动。


Figure 28: PID_POSITION_P = 10 - 增加比列数值P: PID_POSITION_P = 50


Figure 29: PID_POSITION_P = 50 

Figure 30: PID_POSITION_P = 100 - 调整后的 PI 配置。


Figure 31: 带电隔离的 USB-2-RTMI v20





Motion Controller
开发板套装上的MUC板Landungsbrücke带有梯形坡型发生器可以和TMC4671-EVAL一起使用。 TMC4671芯
- 通过 Mini USB 将MUC板 Landungsbruecke 连接到电脑
- 在 Landungsbruecke 对话框 (USB-2-RTMI不可用) 中打开位置模式工具b箱
- 使能速度控制曲线和加速度限制


- 4. 在位置控制工具框 position mode toolbox 控制电机转 10 圈
- 清零位置数值 Clear the position
- 设置目标位置 Target pos. = 655350
- 单击 absolute 按钮开始电机运动


Figure 32: Movement with ramp - 增大减速度


Figure 33: Movement with ramp - 用运动控制重复 10 圈 同时增大减速度参数, 也可以同时调整PI参数:


- 在增加运动控制功能之后调整 PI 配置


Figure 34: PI parameter - 通过Export option 选型保存PI配置





Summary
RTMI 通讯接口为 TMC4671 芯片提供了一个强大的选项来调试芯片.快速实时接入芯片,可以用来调试和监控每个环路。TMCL-IDE为系统开发提供了现成的软件工具。 关于更多 TMC4671 和如何使用的问题,请参考TMC4671数据表。
作者
