捉えにくいトーン: 状態監視用デジタル MEMS 加速度センサーのエイリアシング効果
MEMS 加速度センサーは、現在多用されている圧電式加速度センサーと比較して、安価、軽量、低消費電力、使いやすさといった特長を備えていることから、産業用機械の振動ベースの状態監視用センサーとして魅力的な選択肢となっています。機器メーカーはこれらの特長を生かして、複数の MEMS加速度センサーを組み込んで機械のさまざまな部品の振動信号を検出し、通常とは異なる振動パターンを識別することで、異常や故障の兆候に対して診断を行うことができます。機械の種類やセンサーの取付け位置によってパターンは異なりますが、診断手法は、加速度センサーによって検出された振動の周波数スペクトルからの情報収集、および、振動音の周波数変化、高調波の発生、広帯域振動振幅の変化(特に周波数帯変化)の監視に大きく依存します(1)。
デジタル出力の加速度センサーを使用する場合、設計者はシグナル・チェーン内のデジタル・フィルタによって生じる帯域制限を考慮するとともに、所定の出力データ・レート(サンプリング・レート)において発生する、センサー帯域幅への高周波信号のエイリアシングにも注意する必要があります。サンプリング・レートが S の場合は、折り返しのために、周波数 f(ただし f < S/2)における振動信号と、より高い周波数 S/2 + f における信号を区別することはできません。状態監視アプリケーションでは、このために機械の振動プロファイルの解釈を誤るおそれがあります。
一例として、ADXL355 および ADXL354 加速度センサーを考えます。これらのセンサーは、高分解能の振動測定をきわめて低いノイズで行うことにより、ワイヤレス・センサー・ネットワークを介して構造的欠陥を早期に検出することを目的としたものです。 ADXL 355 の内蔵デジタル・フィルタは、加速度センサーの帯域幅周波数に帯域外周波数のエイリアスを発生させます。例えば 4 kHz ODR での動作では、ナイキスト・レート(2 kHz)を帯域幅 1 kHz 上回る周波数でエイリアスが発生します。これは 3 kHz を超える周波数では特に重要で、この周波数では加速度センサーの帯域内(1 kHz)の周波数にエイリアスが生じ、これが出力の解釈を誤る原因となります。フィルタとセンサー共振の組み合わせは、図 1 に示すように 3 kHz信号を約 25 dB 減衰させて、1 kHz にエイリアスを発生させます。ノイズ密度 N = 25 μ g/ √ Hz、帯域幅 BW = 1 kHz の加速度センサーのダイナミック・レンジは、測定範囲を R =± 8 g とすると次のようになります。

{kind=link}
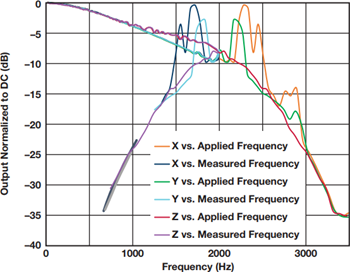
図 1. デジタル・フィルタリングによる ADXL 355 の出力エイリアシングと周波数の関係
3 kHz ~ 3.9 kHz 間のすべての周波数の減衰はこのダイナミック・レンジより小さいので、エイリアスとして現れる信号は、加速度センサーのノイズ・フロアより大きくなります。より狭い帯域幅を許容できるアプリケーションでは、出力をデジタル的にフィルタリングして帯域幅をより低い周波数に制限して、エイリアスとして現れる信号の減衰がアプリケーションに必要なダイナミック・レンジより大きくなるようにすることで、ADXL355 を使用できます。必要なダイナミック・レンジが 30 dB(± 8 g ~ ± 8 mg)となるようにして、一定の閾値を超える振幅の振動音をモニタリングすることが求められるアプリケーションの場合は、デジタル・フィルタ(例えば 4 次バターワース・フィルタ)を使うことによって、帯域幅を 750 Hz に制限することができます。エイリアス信号用のアプリケーションにおける減衰要件が ADXL355 の実際の応答よりも大きい場合は、代わりに ADXL354 を使用することを推奨します。ADXL354 はデジタル・フィルタを内蔵しておらず、エイリアスが生じることはありません。
著者について
この記事に関して
製品
























