Customer Case Study
IMUを活用して実現した自律走行ロボット
![]()
千葉工業大学 先進工学部 未来ロボティクス学科
最先端のロボットの研究/開発を通し、機械、電子、情報など総合的な工学技術を習得した人材の育成に注力
https://www.it-chiba.ac.jp/faculty/ae/robo/
| 顧客課題: | 市街地にも対応できる自律走行ロボットの開発 |
|---|---|
| 導入製品: | 10DoFに対応するIMU「ADIS16480」 |
| 導入効果: |
|
| キーワード: | 自律走行ロボット,IMU,10DoF,オドメトリ,つくばチャレンジ,市街地
|
市街地にも対応可能な自律走行ロボット、IMUの活用により高精度のオドメトリ機能を実現
千葉工業大学のロボット設計・制御研究室では、自律走行ロボットの開発に取り組んでいます。人間とロボットが共存する未来をテーマとした技術の確立を目指し、市街地を舞台として行われる自律走行ロボットの競技会「つくばチャレンジ」にも参加しています。この競技会に向けて同研究室が開発したロボットが「ORNE」です。自律走行ロボットを実現するためには、自身の現在の位置を推定するオドメトリ機能が必須でした。この機能を実現するために採用されたのが、アナログ・デバイセズのIMU(慣性計測ユニット)です。アナログ・デバイセズのIMUは、産業分野で使われるロボットだけでなく、先端的かつ挑戦的な学術分野のロボットでも、重要な役割を担うセンサー・ユニットの1つとして活用されています。
自律走行ロボットの研究/開発、その実践的な取り組みを通して人材を育成
ロボティクス(ロボット工学)およびその成果物であるロボットは、様々な分野で活用されています、ロボットに関連する技術は、産業用途において今後も重要な役割を担うことは間違いありません。そのような背景から、千葉工業大学は2006年に先進工学部 未来ロボティクス学科を開設しました。同学科は、第1学年の段階からロボットの開発に取り組むなど、実践的なカリキュラムを提供していることを特徴とします。「そうした教育体系により、ロボティクスの領域を開拓できる人材の育成を目指しています」と同学科の教授を務める林原靖男氏(工学博士)は語ります。

林原氏は自身のロボット設計・制御研究室において、実験室の内部という限られた空間だけではなく、実際のフィールドでも安定して動作するロボットの研究/開発を行っています。その一環として、自律型のロボットによってサッカー・ゲームを競う「ロボカップ」にも継続的に参加してきました。2018年の世界大会では、テクニカル・チャレンジ部門で7連覇を達成しています。また、ここ数年は、人間とロボットが共存する未来をテーマとした技術の確立を目指し、自律走行ロボットの技術競技会「つくばチャレンジ」にも参加しています。同競技会では、茨城県つくば市内の遊歩道など、通常は人間が利用するコースを自律走行ロボットが走破できるか否かを競います。
自律走行ロボットに必須のオドメトリ機能、その実現の鍵を握ったのはアナログ・デバイセズのIMU
つくばチャレンジのように、人間と同じ空間を自律的に移動するロボットには、当然のことながら車輪やモーターなどの駆動部が必要です。ただ、それらは必要な要素の一部にすぎません。例えば、ロボットが自身の位置や向きを把握するためには、それらを推定する機能が必要になります。また、周囲の状況を把握するためには物体検出機能を用意しなければなりません。更に、ロボットの周辺の歩行者や自転車の安全性を確保するためには、それらの存在を検知する機能や、非常停止を実現する機能、それらを制御するソフトウェアなどが必要です。それらすべての土台になるのは、精密なセンシング機能です。
林原氏のロボット設計・制御研究室は、そうした多様な機能を実現するためのセンサーや、駆動部、判断を担う回路を統合し、自律走行ロボット「ORNE(オーン)」を開発しました(図1)。このロボットは、信頼性に優れるデータを高い精度で取得するためのセンサーとして、アナログ・デバイセズの慣性計測ユニット(IMU:Inertial Measurement Unit)を採用しています。


上述したように、ロボットの自律走行を実現するためには、自身の現在の位置を推定するオドメトリ(Odometry)という手法の活用が必須です。このオドメトリ機能では、入力として、車輪の回転角(進行速度)とロボットの向きの情報を使用します。それらの入力のうち、車輪の回転角については、ロータリ・エンコーダによって取得する方法も想定できます。では、ORNEではなぜIMUが使用されたのでしょうか。これについて、林原氏は次のように説明します。
「つくばチャレンジのコースのような条件の下では、路面の起伏や街路樹の葉などによって車輪が空転することがあります。そのようなエラーは、ロータリ・エンコーダだけでは観測することができません。そこでORNEでは、IMUを利用することにより、ロボットの回転角速度を取得すると共に、車輪の空転によるロボットの進路のずれを常時監視することにしました。ロボットの位置を算出する際、進路のずれの情報もフィードバックすることにより、オドメトリに補正をかけるという方法を考案しました」。
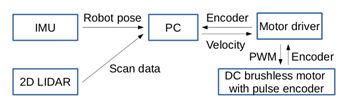
またORNEには、半導体レーザーを使って周囲をスキャンする測域センサーも実装されました。その目的は、自身の周辺に障害物が存在しないかどうかを確認することです。「この測域センサーを利用することにより、ORNEの周囲に存在する歩行者を回避することが可能になります。その回避動作に伴う旋回運動についても、IMUを使って各種のパラメータを測定することにより実現することができました」と林原氏は語ります。各種のセンサーで取得したすべての情報はPCに集約し、モーターの駆動制御に活用します(図2)。

ところで、位置の推定を行う手段としては、GPS(GNSS)を利用する方法を思い浮かべる方が多いのではないでしょうか。ORNEでは、なぜGPSを利用する方法は使われなかったのでしょう。これについて、林原氏は以下のように説明します。
「GPSは広大な空間を対象とした場合には有用な技術です。しかし、近くにビルやマンションが存在する場合には、それらで電波が反射して、マルチパスという現象が生じます。そうすると大きな位置ずれが発生してしまいます。つまり、突然全く異なる位置が提示されるケースがあるということです。当研究室では、方向を把握する方法として、ジャイロ・センサーではなく、地磁気に基づいて磁気絶対方位を検出する磁気センサーも試してみました。しかし、その種のセンサーを使用した場合、鉄骨が埋め込まれた橋梁の近くや車両の近くでは磁気にずれが生じ、方向を推定するのは困難でした」。
このような検討を行った結果、林原氏らは、アナログ・デバイセズのIMUを利用する方法が最適だという結論に達しました。ORNEでは、同IMUが内蔵するジャイロ・センサーによって回転角速度を取得し、回転角を生成することによってオドメトリ機能を実現しています。「ロボットが、指定されたコースを走行する際に位置の推定を行う手法としては、この方式が最適だと判断しました」と林原氏は語ります。
「自律走行ロボットには、オドメトリ機能が必須です。アナログ・デバイセズのIMUを利用することにより、高い精度を達成可能なオドメトリ機能を容易に実現することができました。」林原 靖男
ロボット設計・制御研究室 | 千葉工業大学
なぜ、アナログ・デバイセズが選ばれたのか?
ところで、林原氏らがアナログ・デバイセズのIMUを採用するに至ったきっかけとは、どのようなことだったのでしょうか。
「ロボットの研究/開発においては、優れた特性の部品をいかに入手するかということが重要な鍵になります」と林原氏は指摘します。同氏は、様々なベンダーの製品の情報を常にウォッチしています。そうしたなかで目にとまったのが、アナログ・デバイセズのIMUの情報でした。実は、ロボット設計・制御研究室では、ORNEを開発する以前にも、アナログ・デバイセズのIMUを採用していました。「ロボカップ世界大会2016」に参加した際、「ADIS16375」を使用していたのです(図3)。同IMUは、3軸のジャイロ・センサーと3軸の加速度センサーを備える6自由度(6DoF:Six Degrees of Freedom)の製品でした。


それに対し、ORNEは10DoFのIMUである「ADIS16480」を搭載しています。同IMUは、3軸のジャイロ・センサー、3軸の加速度センサー、3軸の磁力メーター、圧力センサーを備えています。各センサーによる測定結果は、シリアル通信によって簡単に取得することができます。この小型のIMUは、内蔵する補正機能により、周辺回路を使用することなく正確なセンシング情報を取得可能にするアナログ・デバイセズ屈指の製品です。
ORNEの開発に着手するにあたり、林原氏らはADIS16480の特性を実験的に確認しました。その結果、同製品が備えるジャイロ・センサーからの誤差(安定性)は6°/hrと、競合他社の製品と比べて非常に小さいことがわかりました。同製品を使用すれば、アルゴリズムによる補正を行うことなく、安定した状態で角速度を取得できるのです。角度を算出する際には、角速度の積分を実施します。そのため、角速度の誤差は、大きな角度の誤差として積算されることになります。したがって、角速度の測定精度は非常に重要です。林原氏は、「ADIS16480は我々が求めている精度を満たしていました。このことがORNEに採用する決め手になりました」と語ります(図4)。


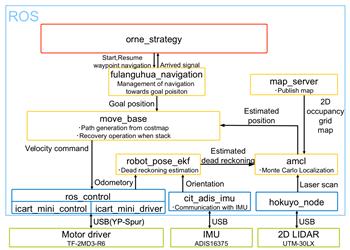
また、ロボットを開発する際には、ソフトウェアの基盤として一般的にROS(Robot Operating System)が使用されます。そして、アナログ・デバイセズのIMUについては、ROSで利用できるデバイス・ドライバが提供されています(図5)。これに関して、林原氏は「ロボットの開発に携わる多くの研究者が、IMUによってロボット周辺の情報を容易に取得し、活用できるようになったと感じます」と述べています。その上で同氏は、「今後もIMUとロボットの親和性を更に高める製品や、デバイス・ドライバを含む便利なソフトウェアが登場することを楽しみにしています」とアナログ・デバイセズに期待を寄せます。

高い精度で自己位置の推定が可能に、市街地に用意された2kmのコースを完走
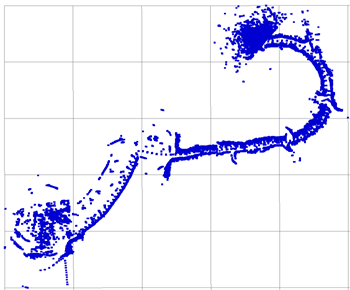
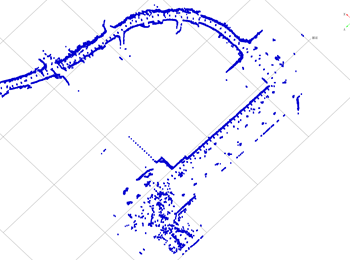
アナログ・デバイセズのIMUを採用したことによって、具体的にはどのような成果が得られたのでしょうか。その一例を示すものが図6です。青色のプロットで表現された地図は、つくばチャレンジのコースで試走を行った際に取得した情報を基にして生成されました。それぞれ、アナログ・デバイセズのIMUを使用した場合と使用していない場合に対応しています。現地の実際の地図と比較すると、IMUを使用した方が明らかに現実に近い結果が得られています。
「試走結果からもわかるように、アナログ・デバイセズのIMUを使用した場合、かなり正確な地図が生成されています。これは大きな進歩です。アナログ・デバイセズのIMUを利用してオドメトリ機能を実現したことにより、自律走行に必要な精度を容易に得ることができました」と林原氏は語ります。




自律走行を行うORNEは、前方に歩行者などを検知した場合には、それを回避するための旋回行動をとるように設計されています。「IMUによる角度の測定ではほとんど誤差は発生しません。そのため、旋回行動を実現する機能も、安全性を高められるよう問題なく実装することができました。チームによっては、歩行者を避けながら走行するのではなく、歩行者が立ち去るまで待つといった作戦を採用しているところもありました。IMUの効果は、このような点にも現れています」と林原氏は述べています。
林原氏らは、2017年11月に行われた「つくばチャレンジ2017」に「ORNE-α」、「ORNE-β」という2台の自律走行ロボットで参加しました。いずれも、2kmに及ぶコースの完走に成功しています。
人とロボットが共存する社会の実現を目指す
今後20年の間に、ロボットやAIによって、人間の様々な活動に対するサポートが提供されるようになると言われています。そうした流れにより、社会は更に効率的になると共に、これまで人の手が届かなかった新たな課題にも挑戦できるようになるでしょう。一方で、人間とロボットが同じ環境で活動できるようするためには、いくつもの課題を解決しなければなりません。未来の自律型ロボットは、つくばチャレンジで条件として設定されているように、歩行者や自転車が周りにいる環境で稼働することになります。そのためには、横断歩道で待機する、自動ドアを通って商業施設に入るといった多様な状況にも対応できるようにする必要があります。林原氏は「現在自動車の分野では、先進運転支援システム(ADAS:Advanced Driver Assistance System)が注目を集めています。今後、人と同じ環境でロボットが活動できるようにするためには、ADASと同様の複雑な機能を追加していかなければならないでしょう。ロボット設計・制御研究室では、人とロボットが共存する社会の実現を目指し、引き続き研究に取り組みます。同時に、未来のロボティクスを担う人材の輩出に努めていきます」と述べています。
IMU採用事例紹介 自立走行ロボット「ORNE」