AN-039: TMC5072-EVAL and Arduino via Single Wire UART
This application note describes how to connect ADI TRINAMIC’s TMC5072-EVAL via Single Wire UART to an Arduino Mega for basic operation. The wiring is limited to the basic functionality to communicate via Single Wire UART.
Preparation
To use the 5V version of the Arduino MEGA, you have to resolder Resistor from position R3 to R8. This enables 5V logic level for the TMC5072. The sense resistor by default is soldered to the right position. Please desolder and resolder to the left position.

Figure 1. Extract from TMC5072-EVAL schematic.

Figure 2. TMC5072-EVAL with pins marked for logic supply voltage.
Wiring
The wiring is very simple. You will need X jumper wires. To make the wiring easieryou can connect the wire directly to the Eselsbrücke. As a reference you can use the TMC5072Eval_v10_01_Schematic.pdf. Here you find the signals that are on each pin. The configuration is documented in the comment section of the Arduino code.
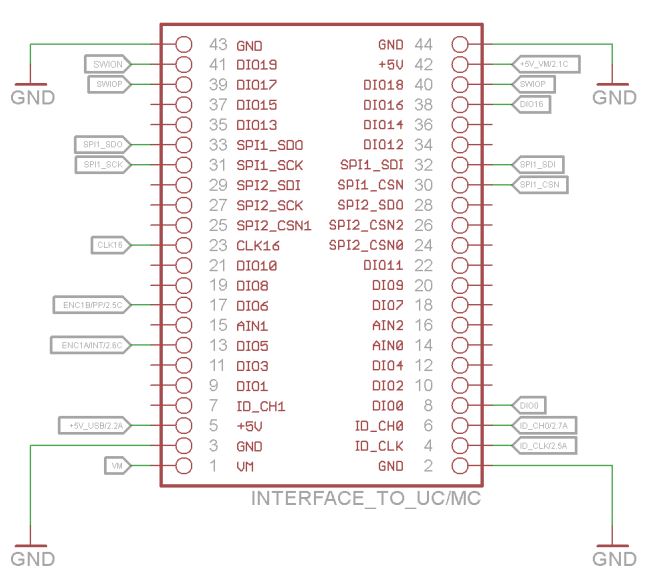
Figure 3: Pinheader of TMC5072-EVAL
Arduino Code
The Arduino Code below is based on the TMC-API package. The program initializes the TMC5072 and executes a simple move to position cycle. It will rotate two 200 full step motors 10 revolutions to the one and 10 revolutions to the other direction depending on the wiring of the stepper motor. Please refer to the TMC5072 datasheet or the TMCL-IDE as a reference for the different registers.
TMC5072-EVAL_UART.ino
/*
* TMC5072-EVAL_UART.ino
*
* Created on: 20.02.2017
* Author: MN
*
* The ADI Trinamic TMC5072 motor controller and driver operates through Single
* Wire UART. This is 64 bits datagram (8 sync bytes, 8 bit slave address,
* 8 bit register address and 32 bit word).
* Each register is specified by a one byte register address: with MSB=0
* for read, MSB=1 for write.
*
* Arduino Pins Eval Board Pins
* 18 TX1 40 SWIOP
* 19 RX1 41 SWION
* 2 DIO 38 DIO16 (SWSEL)
* 4 DIO 33 SDO/ RING
* 3 DIO 8 DIO0 (DRV_ENN)
* 10 DIO 23 CLK16
* GND 2 GND
* +5V 5 +5V
*/
# include " TMC5072_register.h"
# include "CRC.h"
# define CRC8_GEN 0 x07
int SWSEL=2;
int DRV_ENN=3;
int SDO_RING=4;
const int CLOCKOUT=10;
void setup () {
pinMode (SWSEL, OUTPUT);
pinMode (CLOCKOUT, OUTPUT);
pinMode (DRV_ENN, OUTPUT);
pinMode (SDO_RING, OUTPUT);
digitalWrite (DRV_ENN, LOW);
// HIGH = power stage disabled, LOW=power stage enabled
digitalWrite (SWSEL, HIGH);
// HIGH = UART mode, LOW=SPI mode
digitalWrite (SDO_RING, HIGH);
// HIGH = ring mode, LOW=normal mode
// setup timer2
TCCR2A=((1 << WGM21) | (1 << COM2A0));
TCCR2B=(1 << CS20);
TIMSK2=0;
OCR2A=0;
Serial.begin (115200);
Serial1.begin (115200);
delay (500);
uartWriteDatagram (0x00, TMC5072_SLAVECONF, 0x00000001); // SLAVEADDR to 1
delay (500);
tmc5072_initMotorDrivers();
}
void loop () {
// put your main code here, to run repeatedly:
uartRead (0x01, TMC5072_XACTUAL_1); // read out XACTUAL of motor 1
uartRead (0x01, TMC5072_XACTUAL_2); // read out XACTUAL of motor 2
uartWriteDatagram (0x01, TMC5072_XTARGET_1, 0x0007D000);
// XTARGET=512000 | 10 revolutions with micro step=256
uartWriteDatagram (0x01, TMC5072_XTARGET_2, 0xFFF83000);
// XTARGET=-512000 | 10 revolutions with micro step=256
delay (15000);
uartRead (0x01, TMC5072_XACTUAL_1); // read out XACTUAL of motor 1
uartRead (0x01, TMC5072_XACTUAL_2); // read out XACTUAL of motor 2
uartWriteDatagram (0x01, TMC5072_XTARGET_1, 0 x00000000); // XTARGET=0
uartWriteDatagram (0x01, TMC5072_XTARGET_2, 0 x00000000); // XTARGET=0
delay (15000);
}
void uartWriteDatagram (uint8_t SLAVEADDR, uint8_t registerAddress,
unsigned long datagram ) {
// TMC5072 takes 64 bit data: 8 sync + reserved, 8 chip address,
//8 register address, 32 data, 8 CRC
uint8_t CRC=0;
int temp;
unsigned char buf [8];
CRC = NextCRC (CRC, 0 x05, CRC8_GEN);
CRC = NextCRC (CRC, SLAVEADDR, CRC8_GEN);
CRC = NextCRC (CRC, registerAddress | 0x80, CRC8_GEN);
CRC = NextCRC (CRC, (datagram >> 24) & 0xff, CRC8_GEN);
CRC = NextCRC (CRC, (datagram >> 16) & 0xff, CRC8_GEN);
CRC = NextCRC (CRC, (datagram >> 8) & 0xff, CRC8_GEN);
CRC = NextCRC (CRC, datagram & 0xff, CRC8_GEN);
buf [0] = 0 x05;
buf [1] = SLAVEADDR;
buf [2] = registerAddress | 0x80;
buf [3] = (datagram >> 24) & 0xff;
buf [4] = (datagram >> 16) & 0xff;
buf [5] = (datagram >> 8) & 0xff;
buf [6] = datagram & 0xff;
buf [7] = CRC;
temp=Serial1.write (buf, 8); // write datagram
Serial1.flush ); // wait until all datas are written
Serial1.readBytes (buf, 8); // clear input buffer
}
unsigned long uartRead (uint8_t SALVEADDR, uint8_t registerAddress) {
uint8_t CRC=0, temp;
unsigned char buf [8];
unsigned long dataBytes;
CRC= NextCRC (CRC, 0x05, CRC8_GEN);
CRC= NextCRC (CRC, SALVEADDR, CRC8_GEN);
CRC= NextCRC (CRC, registerAddress, CRC8_GEN);
buf[0]=0x05;
buf[1]=SALVEADDR;
buf[2]=registerAddress;
buf[3]=CRC;
Serial1.write (buf, 4); // write datagram
Serial1.flush (); // wait until all datas are written
Serial1.readBytes (buf, 4); // clear input buffer
Serial1.readBytes (buf , 8);
temp buf[2];
dataBytes=buf [3]; // bit 32...24
dataBytes < <= 8;
dataBytes |= buf [4]; // bit 23...16
dataBytes < <= 8;
dataBytes |= buf [5]; // bit 15...8
dataBytes < <= 8;
dataBytes |= buf [6]; // bit 7...0
CRC=0;
for(int i =0; i <7; i ++)
{
CRC = NextCRC (CRC, buf [i], CRC8_GEN);
}
// show received bytes
Serial.print ("Received: 0x");
for(int i =0; i <8; i ++)
{
char tmp [16];
sprintf (tmp, "%.2X", buf [i]);
Serial.print (tmp);
}
Serial.print ("\n");
Serial.print ("CRC:"); Serial.print (CRC, HEX); Serial.print ("<-> BUFFER:");
Serial.println (buf [7], HEX);
return dataBytes;
}
void tmc5072_initMotorDrivers()
{
//2 - phase configuration Motor 1
uartWriteDatagram (0x01, TMC5072_CHOPCONF_1, 0x00010135);
uartWriteDatagram (0x01, TMC5072_IHOLD_IRUN_1, 0x00071400);
//2 - phase configuration Motor 2
uartWriteDatagram (0x01, TMC5072_CHOPCONF_2, 0x00010135);
uartWriteDatagram (0x01, TMC5072_IHOLD_IRUN_2, 0x00071400);
// Reset positions
uartWriteDatagram (0x01, TMC5072_RAMPMODE_1, TMC5072_MODE_POSITION);
uartWriteDatagram (0x01, TMC5072_XTARGET_1, 0);
uartWriteDatagram (0x01, TMC5072_XACTUAL_1, 0);
uartWriteDatagram (0x01, TMC5072_RAMPMODE_2, TMC5072_MODE_POSITION);
uartWriteDatagram (0x01, TMC5072_XTARGET_2, 0);
uartWriteDatagram (0x01, TMC5072_XACTUAL_2, 0);
// Standard values for speed and acceleration
uartWriteDatagram (0x01, TMC5072_VSTART_1, 1);
uartWriteDatagram (0x01, TMC5072_A1_1, 5000);
uartWriteDatagram (0x01, TMC5072_V1_1, 26843);
uartWriteDatagram (0x01, TMC5072_AMAX_1, 5000);
uartWriteDatagram (0x01, TMC5072_VMAX_1, 100000);
uartWriteDatagram (0x01, TMC5072_DMAX_1, 5000);
uartWriteDatagram (0x01, TMC5072_D1_1, 5000);
uartWriteDatagram (0x01, TMC5072_VSTOP_1, 10);
uartWriteDatagram (0x01, TMC5072_VSTART_2, 1);
uartWriteDatagram (0x01, TMC5072_A1_2, 5000);
uartWriteDatagram (0x01, TMC5072_V1_2, 26843);
uartWriteDatagram (0x01, TMC5072_AMAX_2, 5000);
uartWriteDatagram (0x01, TMC5072_VMAX_2, 100000);
uartWriteDatagram (0x01, TMC5072_DMAX_2, 5000);
uartWriteDatagram (0x01, TMC5072_D1_2, 5000);
uartWriteDatagram (0x01, TMC5072_VSTOP_2, 10);
}
TMC5072_register.h
/* * TMC5072-EVAL_UART.ino * * Created on: 20.02.2017 * Author: MN */ # ifndef TMC5072_REGISTER_H # define TMC5072_REGISTER_H // ===== TMC5072 register set ===== # define TMC5072_GCONF 0x00 # define TMC5072_GSTAT 0x01 # define TMC5072_IFCNT 0x02 # define TMC5072_SLAVECONF 0x03 # define TMC5072_INP_OUT 0x04 # define TMC5072_X_COMPARE 0x05 # define TMC5072_PWMCONF_1 0x10 # define TMC5072_PWM_STATUS_1 0x11 # define TMC5072_PWMCONF_2 0x18 # define TMC5072_PWM_STATUS_2 0x19 # define TMC5072_RAMPMODE_1 0x20 # define TMC5072_XACTUAL_1 0x21 # define TMC5072_VACTUAL_1 0x22 # define TMC5072_VSTART_1 0x23 # define TMC5072_A1_1 0x24 # define TMC5072_V1_1 0x25 # define TMC5072_AMAX_1 0x26 # define TMC5072_VMAX_1 0x27 # define TMC5072_DMAX_1 0x28 # define TMC5072_D1_1 0x2A # define TMC5072_VSTOP_1 0x2B # define TMC5072_TZEROWAIT_1 0x2C # define TMC5072_XTARGET_1 0x2D # define TMC5072_IHOLD_IRUN_1 0x30 # define TMC5072_VCOOLTHRS_1 0x31 # define TMC5072_VHIGH_1 0x32 # define TMC5072_VDCMIN_1 0x33 # define TMC5072_SWMODE_1 0x34 # define TMC5072_RAMPSTAT_1 0x35 # define TMC5072_XLATCH_1 0x36 # define TMC5072_ENCMODE_1 0x38 # define TMC5072_XENC_1 0x39 # define TMC5072_ENC_CONST_1 0x3A # define TMC5072_ENC_STATUS_1 0x3B # define TMC5072_ENC_LATCH_1 0x3C # define TMC5072_RAMPMODE_2 0x40 # define TMC5072_XACTUAL_2 0x41 # define TMC5072_VACTUAL_2 0x42 # define TMC5072_VSTART_2 0x43 # define TMC5072_A1_2 0x44 # define TMC5072_V1_2 0x45 # define TMC5072_AMAX_2 0x46 # define TMC5072_VMAX_2 0x47 # define TMC5072_DMAX_2 0x48 # define TMC5072_D1_2 0x4A # define TMC5072_VSTOP_2 0x4B # define TMC5072_TZEROWAIT_204C # define TMC5072_XTARGET_2 0x4D # define TMC5072_IHOLD_IRUN_2 0x50 # define TMC5072_VCOOLTHRS_2 0x51 # define TMC5072_VHIGH_2 0x52 # define TMC5072_VDCMIN_2 0x53 # define TMC5072_SWMODE_2 0x54 # define TMC5072_RAMPSTAT_2 0x55 # define TMC5072_XLATCH_2 0x56 # define TMC5072_ENCMODE_2 0x58 # define TMC5072_XENC_2 0x59 # define TMC5072_ENC_CONST_2 0x5A # define TMC5072_ENC_STATUS_2 0x5B # define TMC5072_ENC_LATCH_2 0x5C # define TMC5072_MSLUT0 0x60 # define TMC5072_MSLUT1 0x61 # define TMC5072_MSLUT2 0x62 # define TMC5072_MSLUT3 0x63 # define TMC5072_MSLUT4 0x64 # define TMC5072_MSLUT5 0x65 # define TMC5072_MSLUT6 0x66 # define TMC5072_MSLUT7 0x67 # define TMC5072_MSLUTSEL 0x68 # define TMC5072_MSLUTSTART 0x69 # define TMC5072_MSCNT_1 0x6A # define TMC5072_MSCURACT_1 0x6B # define TMC5072_CHOPCONF_1 0x6C # define TMC5072_COOLCONF_1 0x6D # define TMC5072_DCCTRL_1 0x6E # define TMC5072_DRVSTATUS_1 0x6F # define TMC5072_MSCNT_2 0 x7A # define TMC5072_MSCURACT_2 0x7B # define TMC5072_CHOPCONF_2 0x7C # define TMC5072_COOLCONF_2 0x7D # define TMC5072_DCCTRL_2 0x7E # define TMC5072_DRVSTATUS_2 0x7F # define TMC5072_PWMCONF_1 0x10 # define TMC5072_PWM_STATUS 0x11 # define TMC5072_RAMPMODE 0x00 # define TMC5072_XACTUAL 0x01 # define TMC5072_VACTUAL 0x02 # define TMC5072_VSTART 0x03 # define TMC5072_A1 0x04 # define TMC5072_V1 0x05 # define TMC5072_AMAX 0x06 # define TMC5072_VMAX 0x07 # define TMC5072_DMAX 0x08 # define TMC5072_D1 0x0A # define TMC5072_VSTOP 0x0B # define TMC5072_TZEROWAIT 0x0C # define TMC5072_XTARGET 0x0D # define TMC5072_IHOLD_IRUN 0x10 # define TMC5072_VCOOLTHRS 0x11 # define TMC5072_VHIGH 0x12 # define TMC5072_VDCMIN 0x13 # define TMC5072_SWMODE 0x14 # define TMC5072_RAMPSTAT 0x15 # define TMC5072_XLATCH 0x16 # define TMC5072_ENCMODE 0x18 # define TMC5072_XENC 0x19 # define TMC5072_ENC_CONST 0x1A # define TMC5072_ENC_STATUS 0x1B # define TMC5072_ENC_LATCH 0x1C # define TMC5072_CHOPCONF 0x6C # define TMC5072_COOLCONF 0x6D # define TMC5072_DRVSTATUS 0x6F // Motorbits und Write-Bit # define TMC5072_MOTOR0 0x20 # define TMC5072_MOTOR1 0x40 # define TMC5072_WRITE 0x80 // Rampenmodi (Register TMC5072_RAMPMODE) # define TMC5072_MODE_POSITION 0 # define TMC5072_MODE_VELPOS 1 # define TMC5072_MODE_VELNEG 2 # define TMC5072_MODE_HOLD 3 // Endschaltermodusbits (Register TMC5072_SWMODE) # define TMC5072_SW_STOPL_ENABLE 0x0001 # define TMC5072_SW_STOPR_ENABLE 0x0002 # define TMC5072_SW_STOPL_POLARITY 0x0004 # define TMC5072_SW_STOPR_POLARITY 0x0008 # define TMC5072_SW_SWAP_LR 0x0010 # define TMC5072_SW_LATCH_L_ACT 0x0020 # define TMC5072_SW_LATCH_L_INACT 0x0040 # define TMC5072_SW_LATCH_R_ACT 0x0080 # define TMC5072_SW_LATCH_R_INACT 0x0100 # define TMC5072_SW_LATCH_ENC 0x0200 # define TMC5072_SW_SG_STOP 0x0400 # define TMC5072_SW_SOFTSTOP 0x0800 // Statusbitss (Register TMC5072_RAMPSTAT) # define TMC5072_RS_STOPL 0x0001 # define TMC5072_RS_STOPR 0x0002 # define TMC5072_RS_LATCHL 0x0004 # define TMC5072_RS_LATCHR 0x0008 # define TMC5072_RS_EV_STOPL 0x0010 # define TMC5072_RS_EV_STOPR 0x0020 # define TMC5072_RS_EV_STOP_SG 0x0040 # define TMC5072_RS_EV_POSREACHED 0x0080 # define TMC5072_RS_VELREACHED 0x0100 # define TMC5072_RS_POSREACHED 0x0200 # define TMC5072_RS_VZERO 0x0400 # define TMC5072_RS_ZEROWAIT 0x0800 # define TMC5072_RS_SECONDMOVE 0x1000 # define TMC5072_RS_SG 0x2000 # define MOTOR_ADDR (m) (0x20 << m) # define MOTOR_ADDR_DRV (m) (m << 4) # endif
TMC5072_register.h
/* *************************************************** Projekt: TMC5130 and TMC5072 CRC calculation Modul: CRC.h CRC-Calculation for UART interfacing Hinweise: Start with CRC-Register=0, then call NextCRC for each byte to be sent or each by received. Send CRC byte last or check received CRC Datum : 14.6.2011 OK **************************************************** */ #ifndef CRC_H #define CRC_H #include "TypeDefs.h" uint8 NextCRCSingle (uint8 Crc, uint8 Data, uint8 Gen, uint8 Bit); uint8 NextCRC (uint8 Crc, uint8 Data, uint8 Gen); # endif
TMC5072_register.h
/* ***************************************************
Projekt: TMC5130 and TMC5072 CRC calculation
Modul: CRC.cpp
CRC - Calculation for UART interfacing
Hinweise: Start with CRC-Register=0,
then call NextCRC for each byte to be sent
or each by received. Send CRC byte last or
check received CRC
Datum: 14.6.2011 OK
Geändert: crc counting direction, 17.06.2011, LL, SK
**************************************************** */
# include "CRC.h"
uint8 NextCRCSingle (uint8 Crc, uint8 Data, uint8 Gen, uint8 Bit)
{
uint8 Compare;
Compare = Data < <(7 - Bit);
Compare &=0 x80;
if ((Crc & 0 x80)^ (Compare))
return (Crc << 1)^ Gen;
else
return (Crc << 1);
}
uint8 NextCRC (uint8 Crc, uint8 Data, uint8 Gen)
{
uint8 Temp;
int i;
Temp=Crc;
for(i=0; i <=7; i++)
{
Temp=NextCRCSingle (Temp, Data, Gen, i);
}
return Temp;
}
TMC5072_register.h
/* * Types.h * * Created on: 29.09.2016 * Author: ed */ # ifndef API_TYPEDEFS_H # define API_TYPEDEFS_H // unsigned types typedef unsigned char u8; typedef unsigned short u16; // typedef unsigned int u32; typedef unsigned long long u64; typedef unsigned char uint8; typedef unsigned short int uint16; typedef unsigned long int uint32; typedef unsigned long long uint64; # define u8_MAX (u8)255 # define u10_MAX (u16)1023 # define u12_MAX (u16)4095 # define u15_MAX (u16)32767 # define u16_MAX (u16)65535 # define u20_MAX (u32)1048575 uL # define u24_MAX (u32)16777215 uL # define u32_MAX (u32)4294967295 uL // signed types typedef signed char s8; typedef signed short s16; typedef signed int s32; typedef signed long long s64; typedef signed char int8; typedef signed short int int16; typedef signed long int int32; typedef signed long long int64; # define s16_MAX (s16)32767 # define s16_MIN (s16)-32768 # define s24_MAX (s32)8388607 # define s24_MIN (s32)-8388608 # define s32_MAX (s32)2147483647 # define s32_MIN (s32)-2147483648 # define FALSE 0 # define TRUE 1 // parameter access # define READ 0 # define WRITE 1 // "macros" # define MIN (a,b) (a<b)? (a):(b) # define MAX (a,b) (a>b)? (a):(b) # ifndef UNUSED # define UNUSED (x)(void)(x) # endif # ifndef NULL # define NULL 0x00u # endif # endif /*API_TYPEDEFS_H*/