高精度加速度センサーの特性
高精度加速度センサーの特性
都筑友昭 著
トランジスタ技術 2008年4月号 掲載
1.ADXL203
2.ADXL202とADXL203の特性比較
2-1.オフセット感度の特性
2-2.ノイズ特性
3.ADXL202とADXL203で傾きを計測した場合の誤差計算
3-1.分解能を計算する
3-2.温度特性の計算
3-3.傾き検出の精度
4.加速度センサーの使い方の広がり
1.ADXL203
アナログ・デバイセズのADXL203はシグナルコンディショニング済みの電圧出力を備えた、高精度、高安定性、広い動作温度範囲を実現した2軸の静電容量型加速度センサーで、全ての機能を1個のモノリシックICに集積しています。ADXL203は単一DC電源(3V~6V)で動作し、5V動作時の感度は1000mV/gです。温度特性、ノイズ特性に優れ、広い温度範囲で動作しますので、傾き検出や自動車の姿勢制御等の高精度の加速度検出が要求されるアプリケーションへの組み込みに最適です。
表1にADXL203とADXL202の主な仕様を示します。
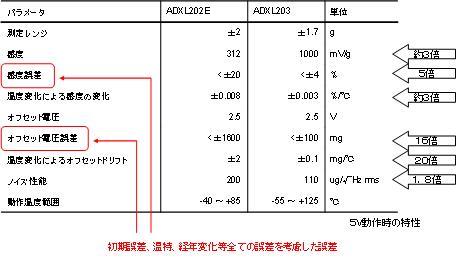
表1 ADXL202とADXL203の主な仕様
2-1.オフセットと感度の特性
ADXL203のオフセットと感度の温特は、センサー素子の構造を変更する事によって外部ストレスの影響を受けにくくした事と周辺回路部分の温特を向上させた事でADXL202の数倍から数十倍も改善されました。ADXL203は温特だけではなく初期誤差についても、トリミング用回路の調整等によって改善されています。初期誤差、温特、経年変化等すべての誤差を総合しても感度誤差は±4%以下、オフセット誤差は±100mg以下と、ADXL202に比べて非常に小さい値に改善されています。
2-2.ノイズ特性
ADXL203の容量検出用の櫛歯はADXL202の櫛歯よりも厚くなっています。 図1に示すように、容量検出用の櫛歯の面積が広がるので素子の感度が高くなり、センサー全体としてのS/Nが向上します。ADXL203のノイズは110ug/√Hzで、センサーの帯域を50Hzにした時のノイズレベルは約1mgrmsです。

図1 センサー素子の高さ
3.ADXL202とADXL203で傾きを計測した場合の誤差計算
特性の向上を確認する為に、ADXL202とADXL203を使って傾きを計測した場合にそれぞれどれ位の誤差が出るのかを計算してみます。多くの書籍等で解説されているので詳細は省きますが、図2に示すように、加速度センサーを水平に置いてセンサーの軸と同一の方向にθだけ傾けると、傾き角度に応じた加速度が計測されます。計測される加速度aと傾きθの関係は、
θ=SIN-1(a) (1)
です。水平面に対して加速度センサーを1度傾けると、約17.4mgの出力が検出される事になります。
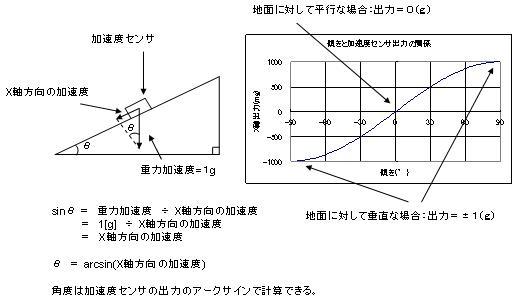
図2 傾きと出力の関係
傾きを計算する条件を以下の様に設定して、実際にセンサーの特性から傾き計測の精度を計算してみます。
条件1:センサーの帯域:10Hz
条件2:傾きの最大値:30度
条件3:温度範囲:25度から65度
条件4:オフセットと感度の初期誤差は補正するものとして考慮しない
3-1.分解能を計算する
傾き計測の分解能は、センサーのノイズフロアを計算する事でわかります。ADXL202とADXL203のノイズの実効値は次式で与えられます。
N = (ノイズ電圧密度) × √(BW × 1.6) (2)
ADXL202のノイズ電圧密度は200μg/√Hz、ADXL203のノイズ電圧密度は110μg/√Hzですので、帯域を10Hzに選択した時のセンサーの分解能はそれぞれ、800μgrmsと440μgrmです。角度としての分解能はセンサーの分解能を1度あたりの出力である17.4mgで割ると計算でき、それぞれ約0.05度、0.025度です。
3-2.温度特性の計算
動作温度範囲を25℃から65℃としましたので、最大で40℃の温度変化が考えられます。オフセットの温度変化は温度範囲×オフセットドリフトで計算できます。また温度による感度の変化も同様に温度範囲×感度温特で計算できます。
3-3. 傾き検出の精度
式(1)よりセンサーが30度傾いた時の出力は500mgです。感度の温度変化による誤差の最大値は500mg×感度変化率で計算できます。オフセットと感度の温特を合わせると、今回の条件ではADXL202の誤差が81.6mg、ADXL203の誤差が4.6mgとなります。角度に直すとADXL202では25度から65度の温度範囲内において約4.8度、ADXL203では約0.3度の精度で角度を計測出来る事になり、2つのセンサーの特性の違いを実感する事が出来ます。
表2に計算結果を示します。

表2 傾き計測の精度
特性の向上を確認する為に、ADXL202とADXL203を使って傾きを計測した場合にそれぞれどれ位の誤差が出るのかを計算してみます。多くの 書籍等で解説されているので詳細は省きますが、図2に示すように、加速度センサーを水平に置いてセンサーの軸と同一の方向にθだけ傾けると、傾き角度に応 じた加速度が計測されます。計測される加速度aと傾きθの関係は、
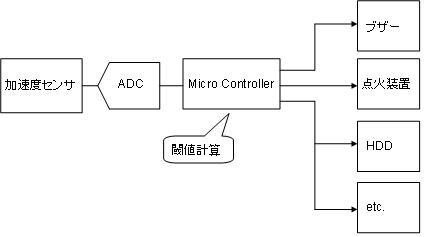
図1 ある閾値を超えると特定の動作をさせる使い方
現在では加速度センサーの特性向上によって高精度の加速度検出が可能になり、自動車の姿勢制御やABS等センサー出力によって動作にフィードバックをかける用途にも加速度センサーが応用されるようになってきています。

図2 センサー出力により動作にフィードバックをかける使い方
今後も加速度センサーの高精度化、小型化、低価格化によって加速度センサーの用途は拡大を続けていくと考えられており、その応用分野は自動車市場のみではなく携帯電話やゲーム機等の民生市場まで幅広い分野に広がっています。