This appnote shows step by step how to configure realtime operation with TwinCAT3 and ADI Trinamic EtherCAT modules. For example the TMCM-6213 is a six axes controller/driver module for 2-phase bipolar stepper.
It supports EtherCAT interface with CoE CiA-402 Drive Profile for all axis. General usage of TwinCAT is not explained.
Preparation
It is recommended to update the ADI Trinamic module:
Firmware
EEPROM
ESI file (.xml)
ADI Trinamic module firmware should be at least v1.09. Example for files notation as follows:
TMCM-6213.xml
TMCM-6213_CoE_V109.bin
TMCM-6213_CoE_V109.hex
The files can be downloaded from the module page: https://www.trinamic.com/products/modules/details/tmcm-6213/
Create a new TwinCAT XAE project
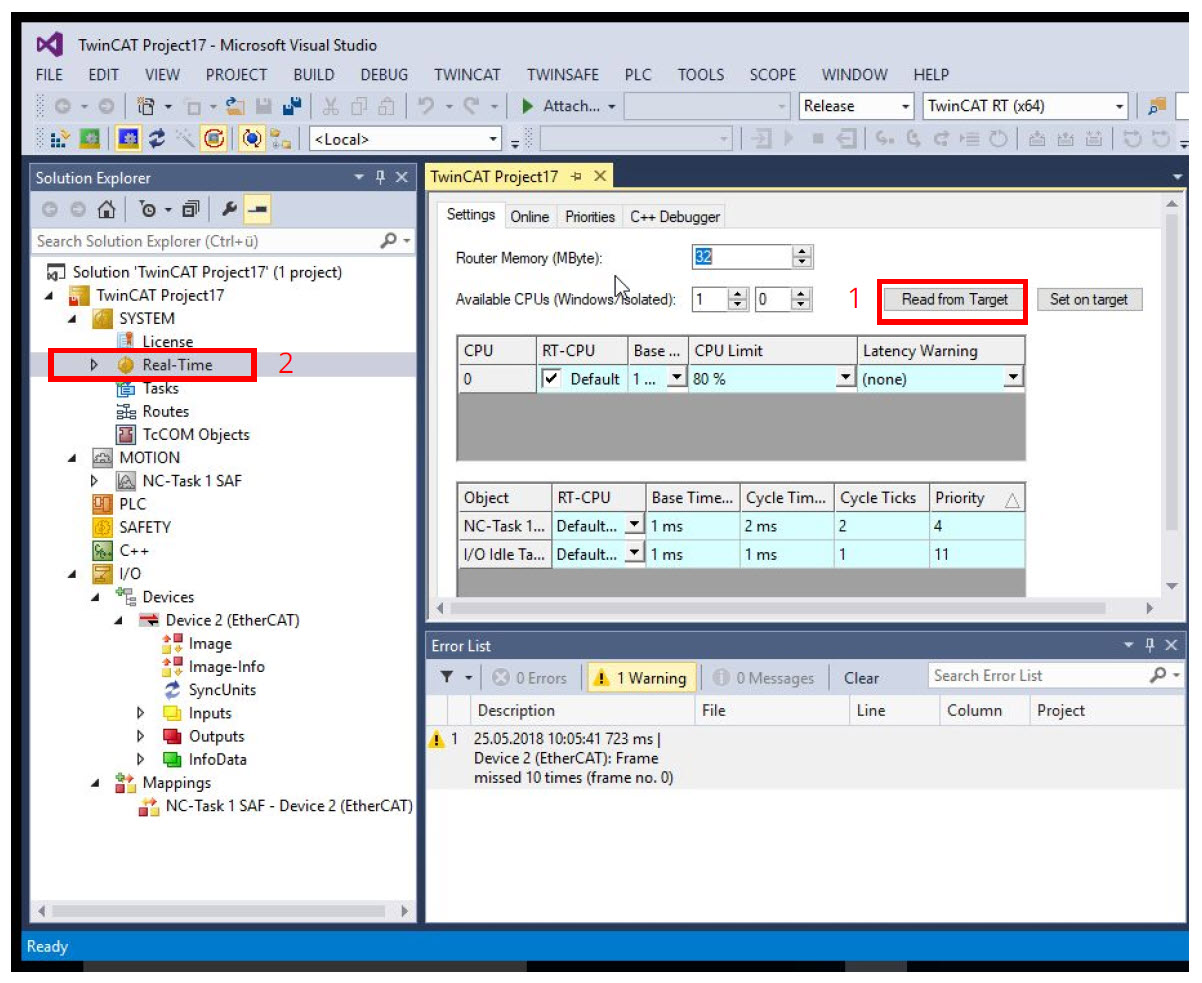
Assign dedicated processor core to TwinCAT
Assignment of processor core needs to be done only once!
The processor core will be used for realtime motion NC_Task
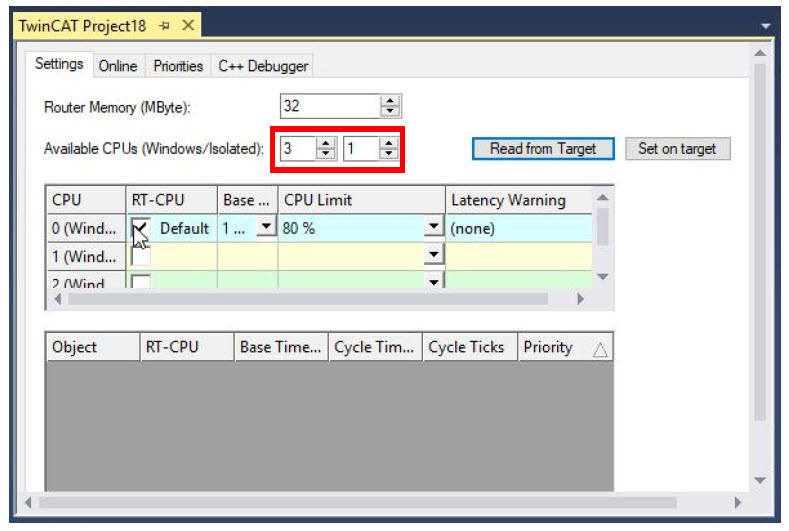
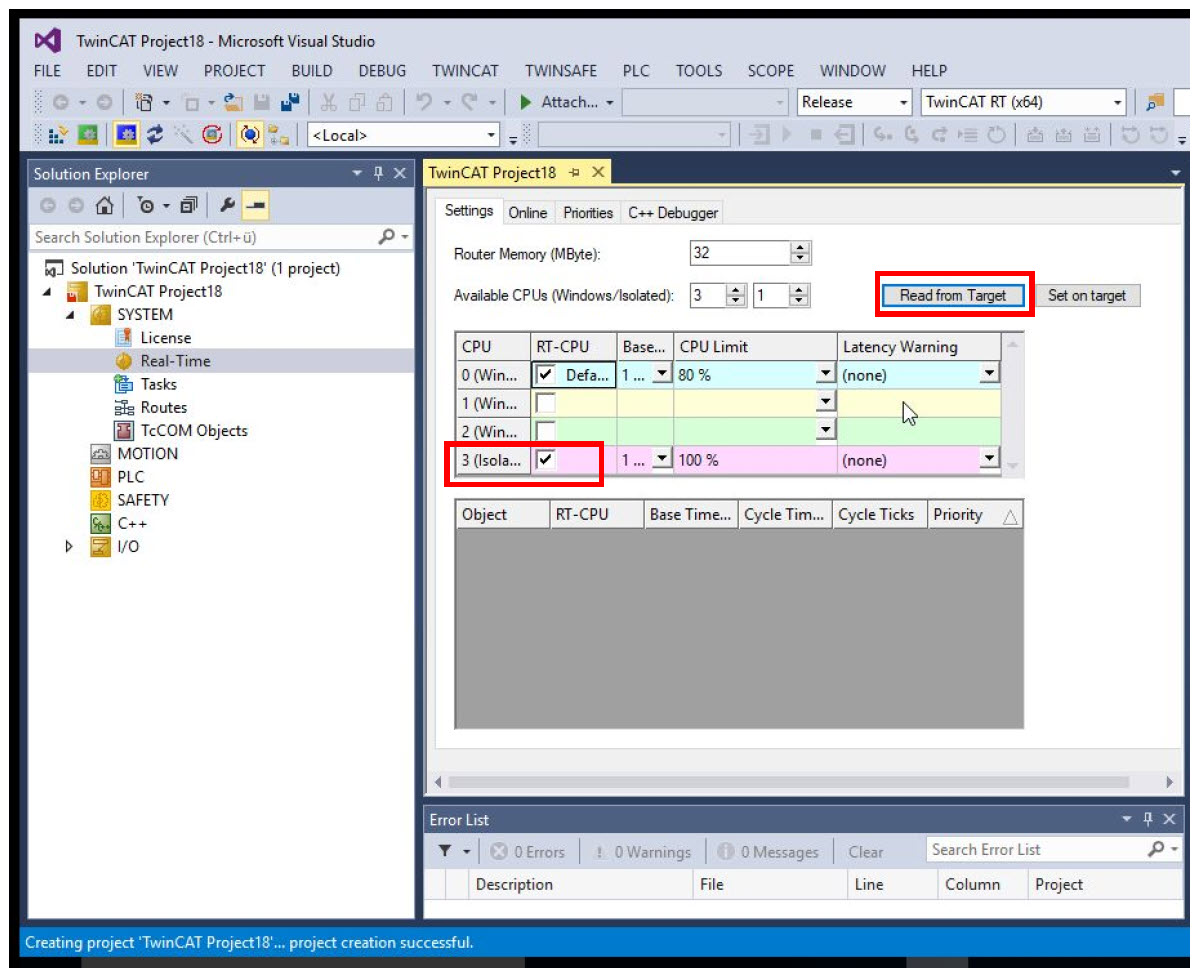
Read from Target Figure 1: Available CPU (Windows/Isolated) = 4/0 → no processor core is assigned to TwinCAT yet
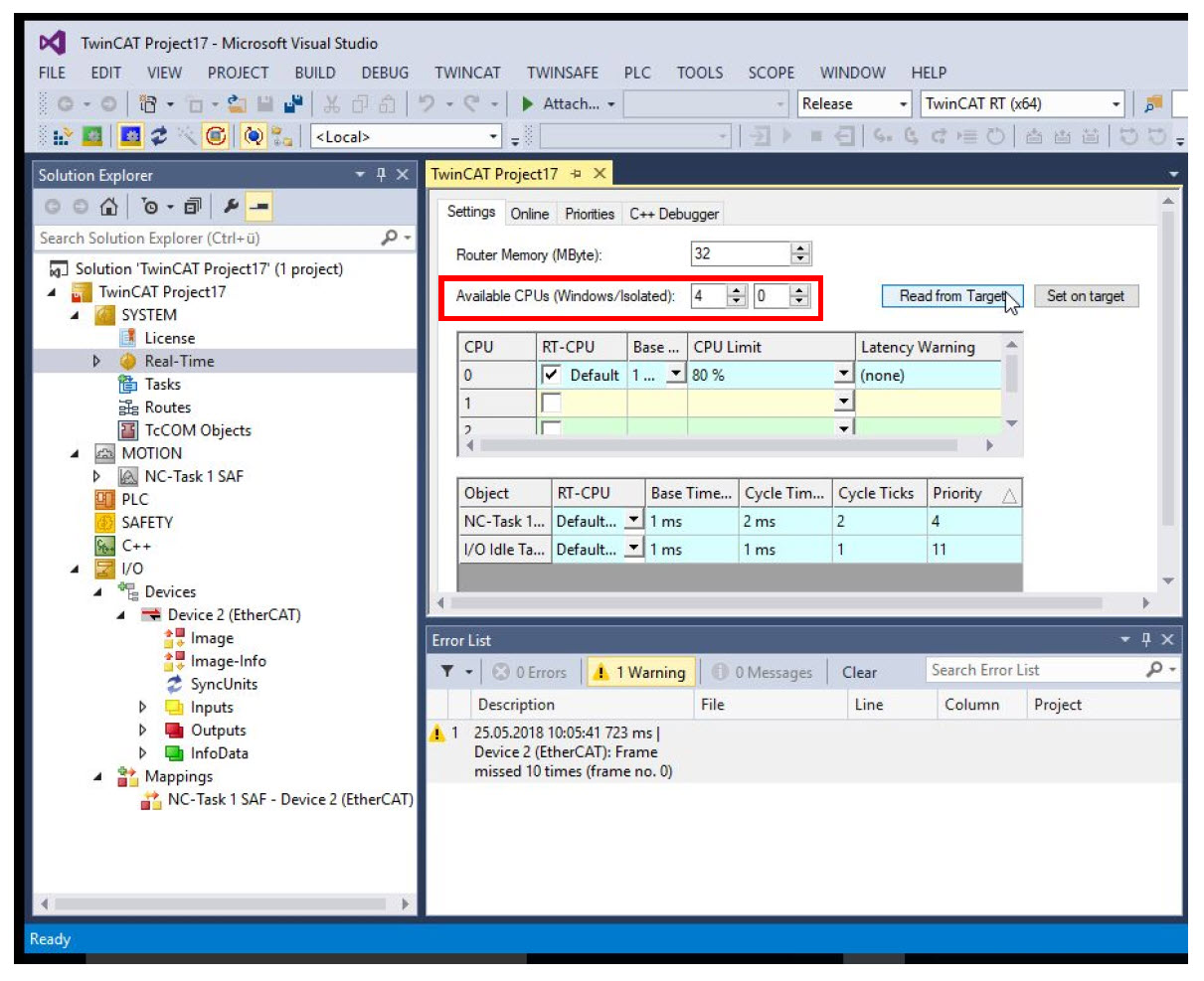
Set on target Assign processor core to TwinCAT:
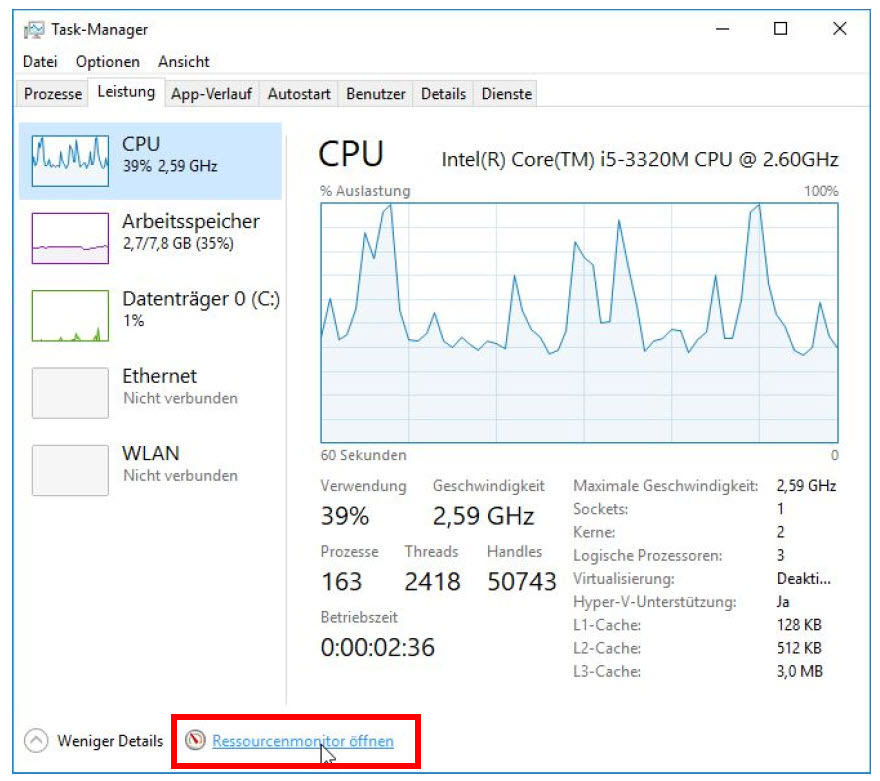
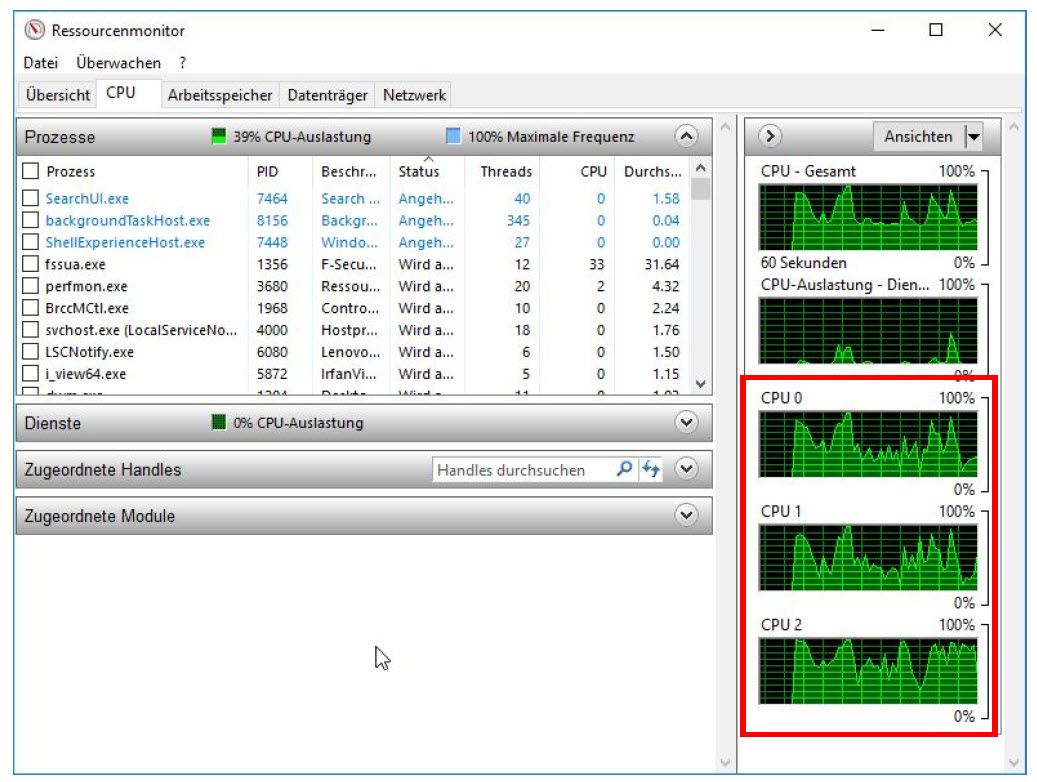
After restart check the Task Manager -> Resource Monitor
The core assignment is permanent. In order to unassign processor core again repeat step 2. Using the Set on targe dialog and set Available (Windows/Isolated): 4/0
For the next steps in this app note, the configuration should be set to Available CPUs (Windows/Isolated): 3/1
Select assigned processor core
Open TwinCAT Project.
Project → System → Real-Time → Settings Tab
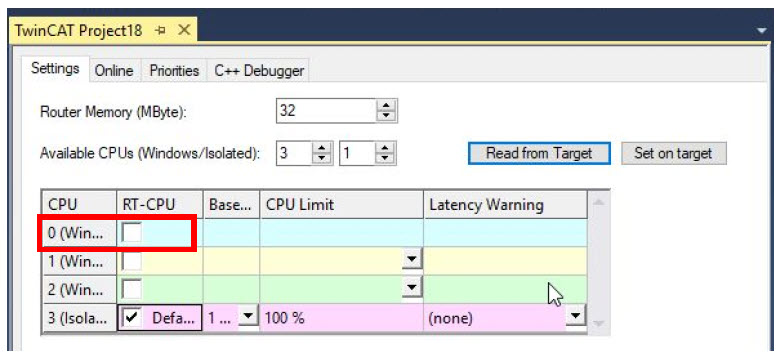
Choose Isolated CPU core.
Deactivate Windows CPU core.
Thus the windows core is reserved for TwinCAT real-time operations. In the next step the real-time
operation will be activated.
Activate Configuration (Motion Task)
Activate configuration.
Enter the License code which is generated.
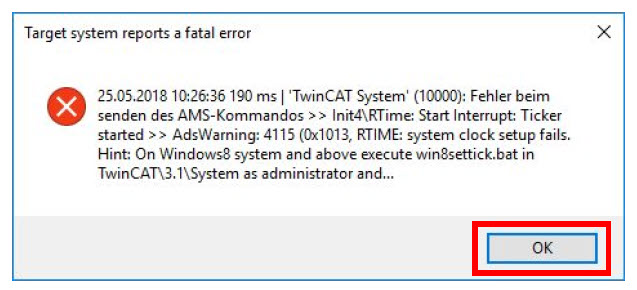
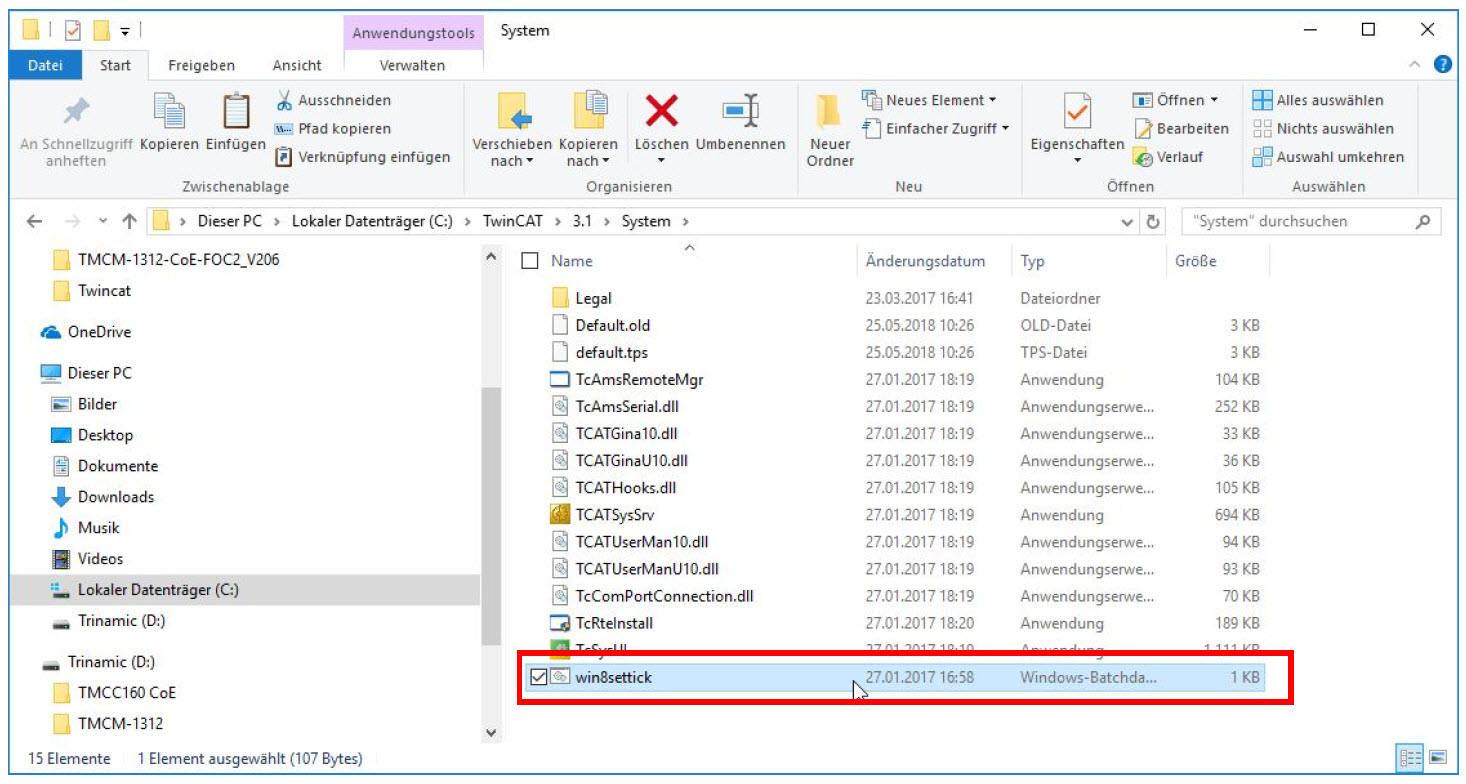
Execute win8settick.bat as administrator if the following Error shows up. This is a TwinCat specific Error.
If the configuration is active, the green logo shows up in the bottom right corner.
Use Jogging Mode
Axis 1 is driven in Jogging Mode in this section.
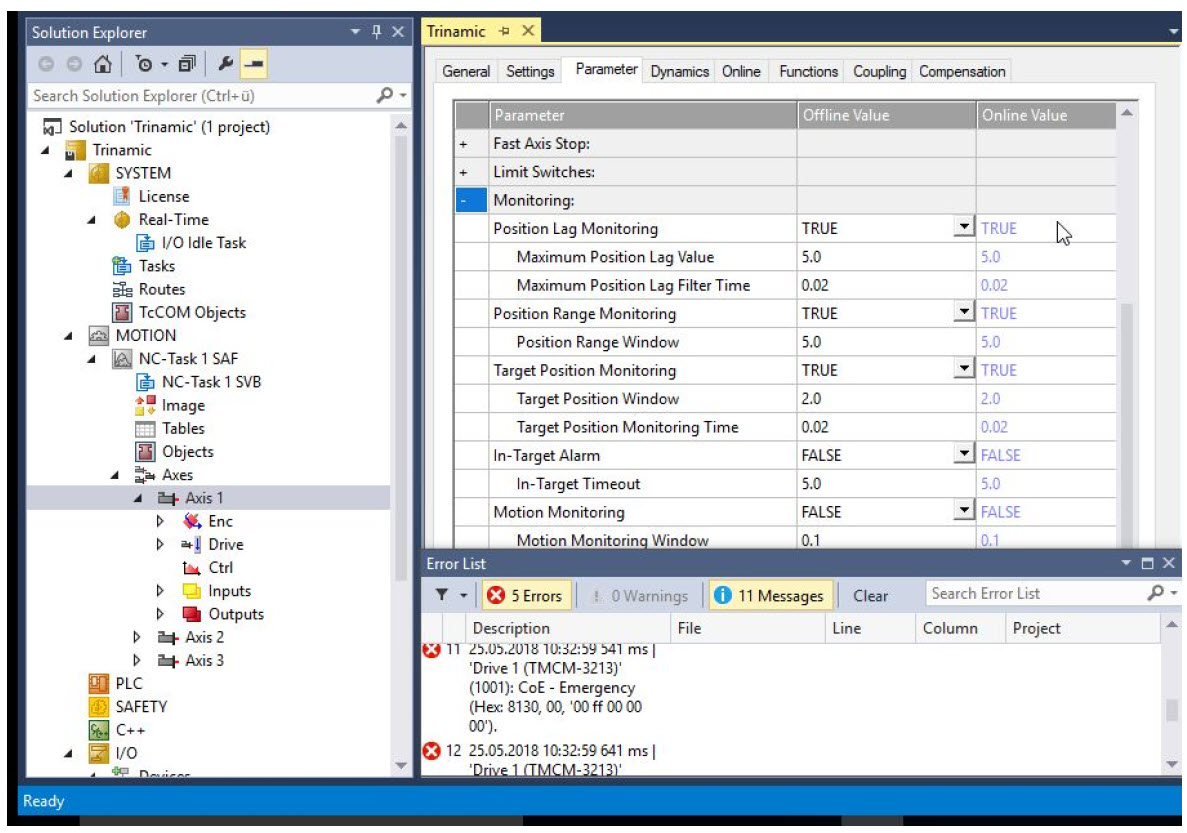
Configure Monitoring
Axis 1 → Parameter → Monitoring → Set Every Value to False (since not provided by the module)
Confirm every value by clicking on Download.
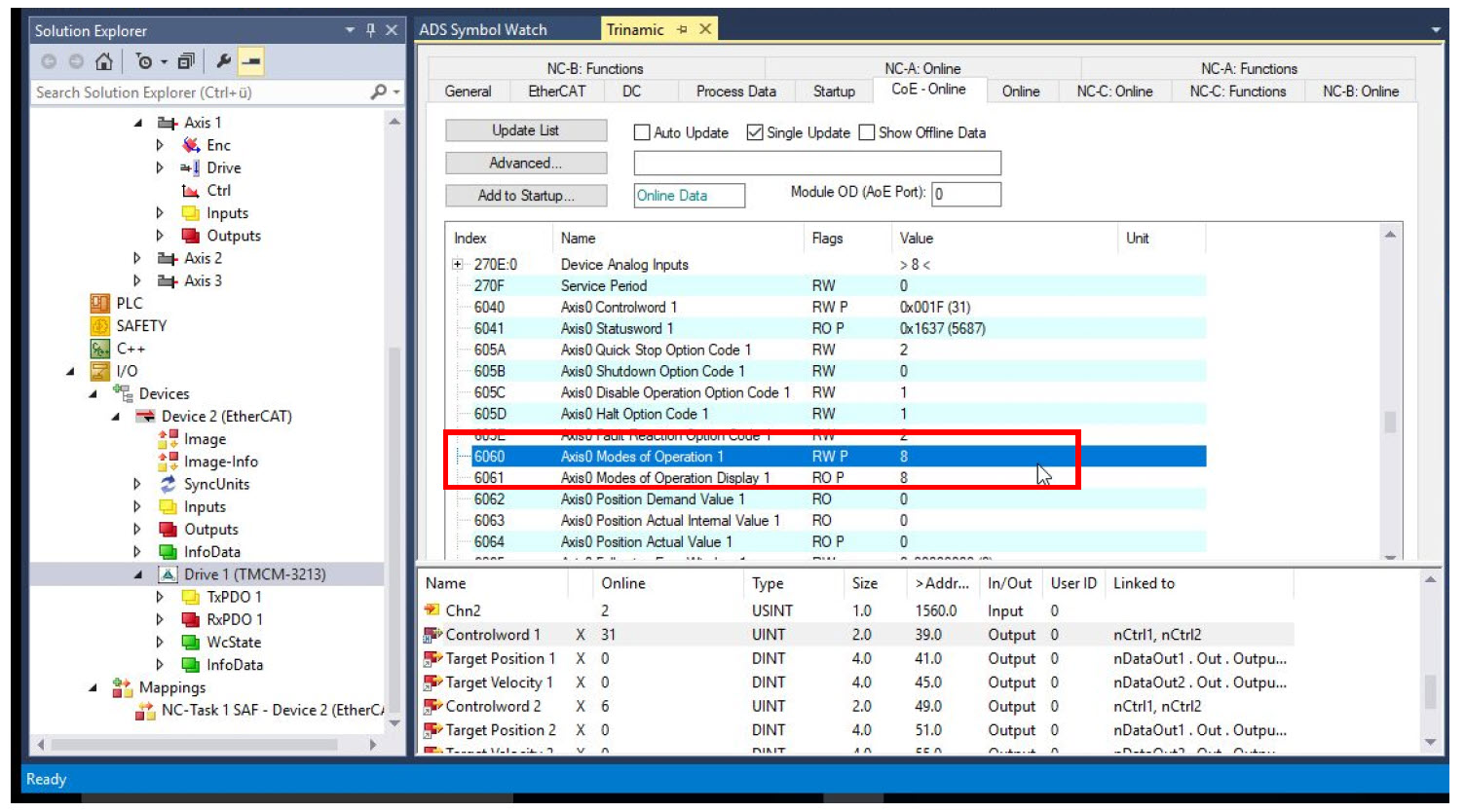
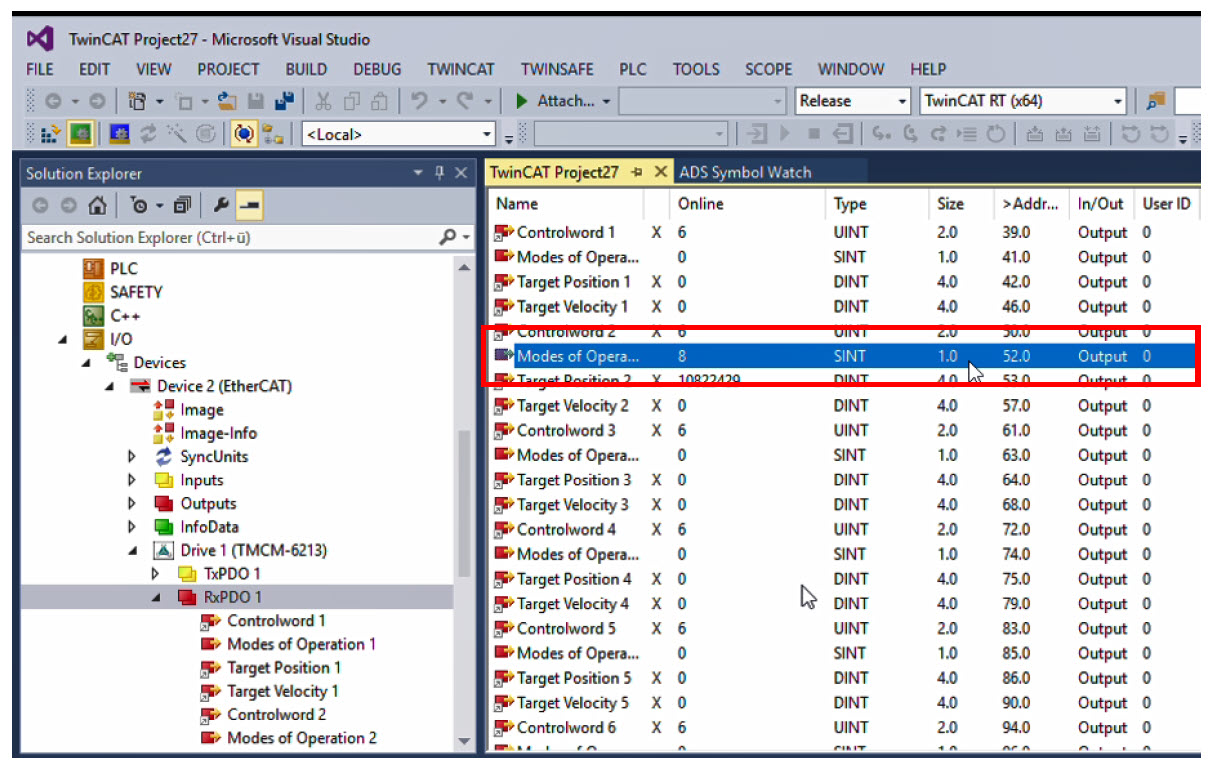
Set axis 1 to CSP mode. Write 8 to Axis0 Modes of Operation 1
Modes of Operation as SDO (Firmware v207) Modes of Operation as PDO in (Firmware v208)
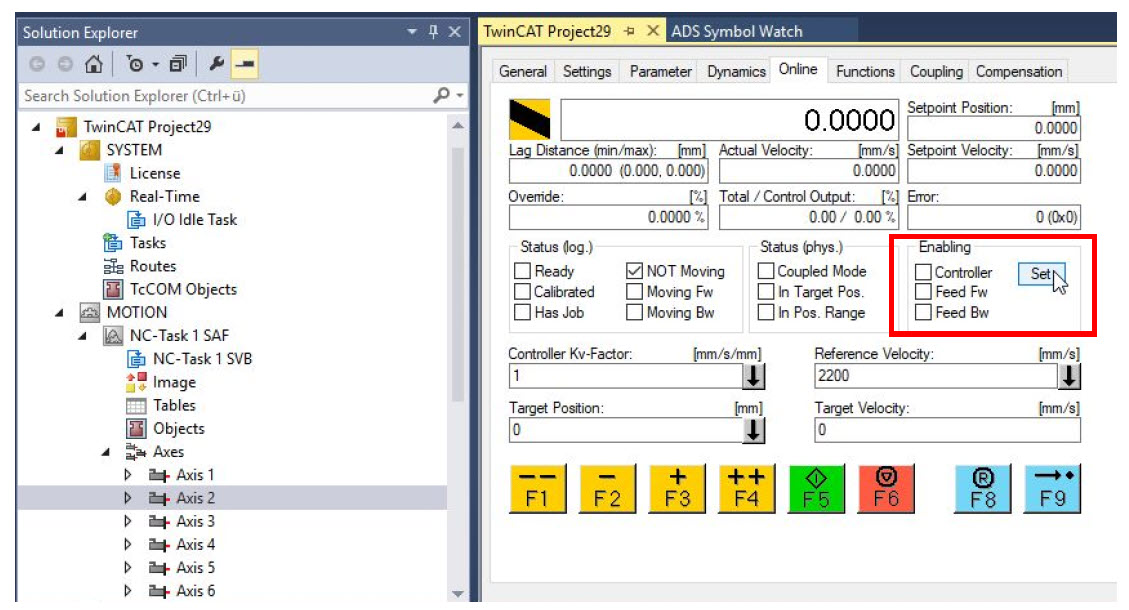
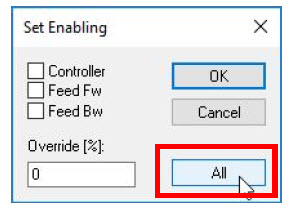
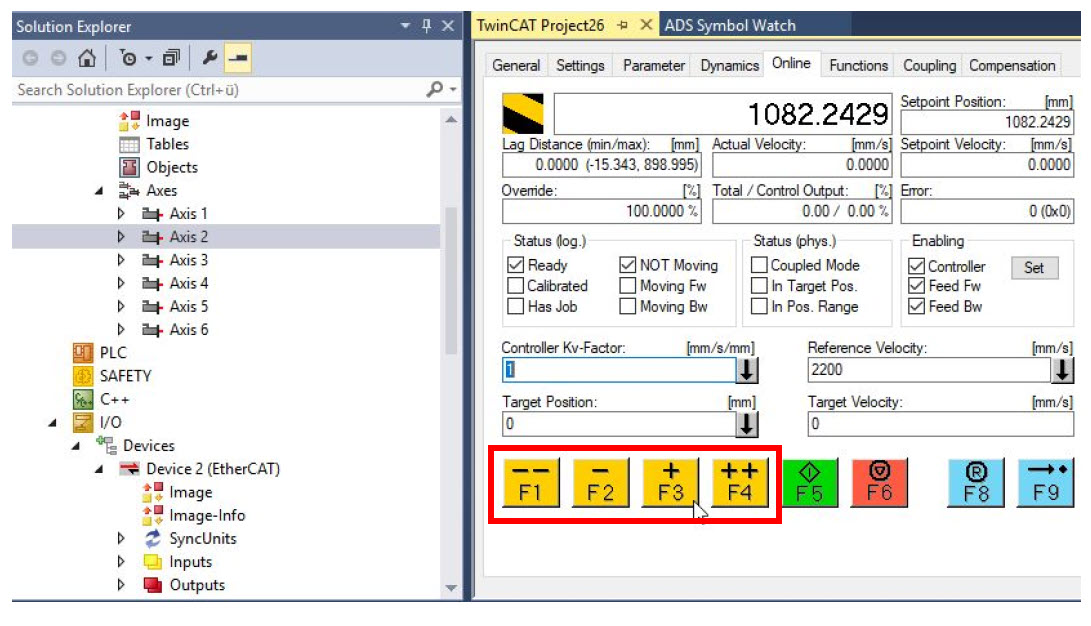
Enable Controller and Feed Fw/Bw
Motion → Axes → Axis X → Tab Online → Enabling → Set → All
Use Jog Control Buttons to move the axis X.
作者
Olav Kahlbaum
Olav Kahlbaum works as a Staff Engineer for Firmware at Trinamic part of Analog Devices based in Germany. After finishind his studys of Computer Science in 1998 he joined the Trinamic team in 2000. He mainly develops firmware for stepper motor control modules. During his career at Trinamic he has become one of the inventors of TMCL and has specialized very much in communication protocols like CANopen, EtherCAT and Modbus.