MEMS Enable Medical Innovation
Idea in Brief
This article first introduces some of the fundamentals of MEMS motion sensing, including key understandings needed for component selection. It also looks at the unique challenges of medical navigation applications and explores possible solutions ranging from various sensor mechanisms, to necessary sensor processing, to the unique system characteristics and data processing required to provide optimal solutions. Critical sensor specifications will be reviewed and explained for their individual contributions and, more importantly, the potential error and drift mechanisms will be discussed to aid in sensor selection. Opportunities and approaches for sensor enhancement through integration, sensor fusion, and sensor processing (such as Kalman filtering) will be highlighted as well.
The ability to detect, capture, and analyze motion with microelectromechanical systems (MEMS) has become a commonplace feature on consumer and mobile devices. Where technological advances have provided high precision motion capture, applications have extended into industrial fields. Many potential medical diagnostic and instrumentation applications can benefit from merging the precision of industrial devices with the mobility and economies of consumer devices.
In some cases, the complexity of medical motion capture rivals that of high end military systems. For instance, precision navigation, typically associated with applications developed for land, air, and sea vehicles, is increasingly being used in medical applications ranging from surgical instrumentation to robotics. Also, while the design requirements of a surgical navigation system share broad similarities with traditional vehicle navigation, there are distinct new challenges posed by the environment and the level of required performance.
Motion Capture Enables Innovation and Value in Healthcare
Silicon-based accelerometer and gyroscope sensors known as MEMS (Figure 1) are commonly found today in a wide range of devices. These inertial sensors detect and measure motion, with minimal power and size, and are valuable to nearly any application where movement is involved, and even those where lack of motion is critical. Table 1 outlines some of the basic pertinent medical applications by motion type. Later, more advanced applications where combinations of motion, in complex scenarios that present additional challenges, will be discussed.

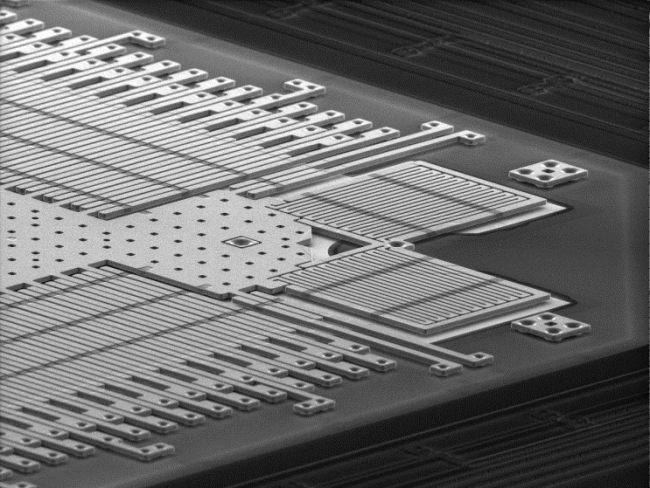
Figure 1. MEMS Silicon Structures Sense Acceleration and Rotation and Convert This to an Electrical Signal with the Help of Signal Processing.
| Acceleration/ Position |
Tilt | Angular Rate/ Angle |
Vibration | Shock | Sensor Fusion |
| CPR assist | Patient down monitors | Scanning instruments | Tremor control | High value equipment warranty | Precision surgical navigation |
| Activity monitors | Bed-patient positioning/ aspiration |
Basic surgical tools | Equipment wear | Remote diagnostics | |
| Biofeedback monitors | Blood pressure monitors Imaging equipment | Prosthetics | Rehabilitation |
Capturing Motion to Enable New Instrumentation and Diagnostic Tools
Many medical applications such as accurately determining position and repetition rate in CPR, or the precise positioning of scanning equipment in relation to a patient’s body, can benefit from relatively basic, yet still precise, motion information. In these cases, a single sensor type may be adequate, particularly if there are other sensor inputs, or at least fixed/known boundaries to the movement and use case.
Even with limited range of motion, or simpler motion dynamics, the individual sensors must have well understood and controlled drift factors, and it is often desirable to have embedded compensation within the sensor, as well as the ability to tune it to the application via embedded filtering.
Complex Motion Requires Precision Sensors and Embedded Sensor Processing
While simple motion detection, linear movement along one axis, for example, is valuable to a number of applications, such as detecting whether an elderly person has fallen, a majority of applications involve multiple types and multiple axes of motion. Being able to capture this complex, multi-dimensional motion can enable new benefits while maintaining accuracy in the most critical of environments.
In many cases, it is necessary to combine multiple sensor types—linear and rotational, for instance—in order to precisely determine the motion an object has experienced. As an example, accelerometers are sensitive to the Earth’s gravity, so they can be used to determine inclination angle. As a MEMS accelerometer is rotated through a ±1-g field, (±90°), it is able to translate that motion into an angle representation. However, the accelerometer cannot distinguish static acceleration (gravity) from dynamic acceleration. In the later case, an accelerometer can be combined with a gyroscope, and post-processing of both devices can discern the linear acceleration from the tilt, based upon known motion dynamics models. This process of sensor fusion obviously becomes more complex as the system dynamics (number of axes of motion, types, and degrees of freedom of motion) increase.
It is also important to understand the environmental influences on sensor accuracy. Temperature is obviously a key concern and can typically be corrected for; in fact, higher precision precalibrated sensors will dynamically compensate themselves. A less obvious factor to consider is the potential for even slight vibrations to produce accuracy shifts in rotational rate sensors. These effects, known as linear acceleration and vibration rectification, can be significant depending on the quality of the gyroscope. Sensor fusion improves performance by using an accelerometer to detect linear acceleration and compensate for the gyroscope’s linear acceleration sensitivity.
For many applications, particularly those requiring performance beyond basic pointing (up, down, left, right) or simple movement (in motion or stationary), multiple degrees-of-freedom motion detection is required. For example, a six degree-of-freedom inertial sensor has the ability to detect linear acceleration on each of three (x, y, z) axes and rotational movement on the same three axis, also referred to as roll, pitch, and yaw, as depicted in Figure 2.

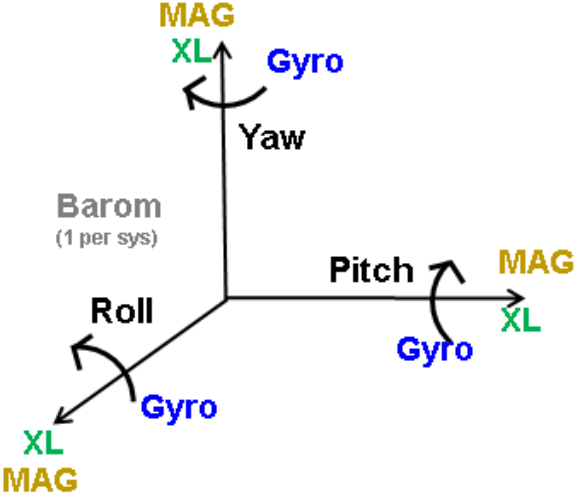
Figure 2. Linear X, Y, and Z Motion, Plus Rotational Roll, Pitch and Yaw Make Up the Six Degrees of Motion Measurement Required for Full Motion Assessment; Often Augmented by Both Magnetometers and a Barometer.
Basic Navigation Principles
The use of inertial sensors as a navigation aid has become prevalent in the industry. Typically, they are used in conjunction with other navigation devices such as GPS. When GPS access is unreliable, inertial guidance fills the gap in coverage with what is called dead reckoning. Other sensors, including optical and magnetic, may be added depending on the environment and the performance goals. Each sensor type has its own limitations. MEMS inertial sensors provide the potential to fully compensate for these other sensor inaccuracies since they are not affected by the same interferences and do not require external infrastructure: no satellite, magnetic field, or camera is needed—just inertia. The major navigational sensor approaches are outlined in Table 2, along with their strengths and potential limitations.
| Sensor Type | Major Advantage | Potential Limitations | Applicable to Medical Navigation? |
| GPS | Long term absolute reference | Potential blockages | No |
| Magnetic | No required infrastructure (except Earth) | Subject to field interference | Limited |
| Optical | Intuitive | Line of sight obstruction | Limited |
| Inertial | Self contained | Relative, not absolute reference | Yes |
As with the potential for GPS blockage in vehicle navigation, the medical corollary is optical guidance and the potential for line-of-sight blockages. Inertial-based sensors perform dead reckoning during the optical blockage, as well as enhancing system reliability by providing redundant sensing.
Medical Navigation
One medical application outlined earlier in Table 1, involves the use of inertial sensors in the operating room for more accurate alignment of artificial knee or hip joints with a patient’s unique anatomical structure. The goal here is to improve joint alignment to less than 1° error from the patient’s natural alignment axis, versus today’s 3° or larger error using purely mechanical alignment approaches. Greater than 95 percent of total knee arthoplasty (TKA) procedures today are done with mechanical alignment. Computer assisted approaches using optical alignment have only slowly begun to replace some mechanical procedures, likely due to the equipment overhead required. Whether mechanical or optical alignment is used, approximately 30 percent of these procedures result in misalignment (defined as >3° error), which often leads to both discomfort and additional surgery. Reducing misalignment has the potential of offering less invasive and shorter surgery time, increasing post-operative patient comfort, and producing longer lasting joint replacements. Inertial sensors in the form of a full multiaxis inertial measurement unit (IMU), as shown in Figure 3, have demonstrated substantially improved accuracy for TKA.

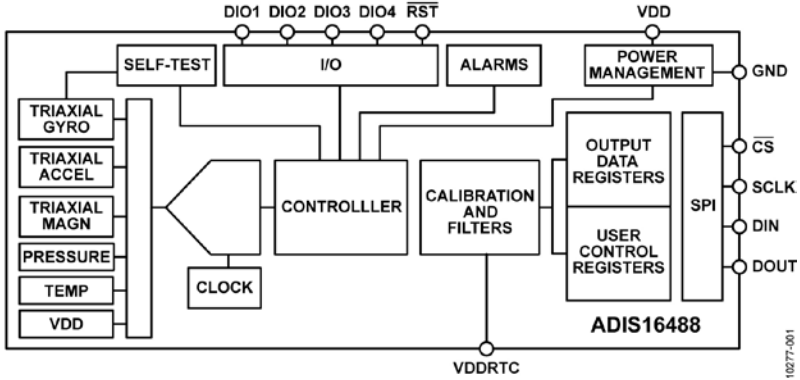
Figure 3. MEMS-Based Inertial Measurement Units Provide Precision Six-Degrees-of-Motion Measurement in Compact Form Factors Suitable to Surgical Instrumentation.
Sensor Selection and System Level Processing
There is a large variation in the performance levels of inertial sensors. Devices suitable for gaming are not able to address the high performance navigation problem outlined here. The key MEMS specifications of interest are bias drift, vibration influence, sensitivity, and noise. Precision industrial and medical navigation typically require performance levels that are an order of magnitude higher than is available from the MEMS sensors targeted for use in consumer devices. Table 3 outlines general system considerations, which through analysis can help focus the sensor selection.
| System Variable | Conditions/Considerations |
| Environment | Indoor/outdoor, temperature, shock/vibration, interference sources |
| Performance rating/goals | Accuracy, repeatability, speed, stability |
| Operator | Assisted or autonomous, trained or untrained |
| Safety | Life critical, inaccessible, redundancy |
| Budget | Cost/time to implement, risk |
Most systems will implement some form of Kalman filter to effectively merge multiple sensor types. The Kalman filter takes into account the system dynamics model, the relative sensor accuracies, and other application specific control inputs to make the best determination of actual movement. Higher accuracy inertial sensors (low noise, low drift, and stability over temperature/time/vibration/supply-variance) reduce the complexity of the Kalman filter, the number of redundant sensors required, and the number of limitations placed on allowable system operational scenarios.
The two primary challenges found in any high performance motion capture implementation are the conversion of raw sensor data to calibrated and stable sensor data, and the translation of precision sensor data into actual position/tracking information. Overcoming the first hurdle involves integration of optimized sensor processing electronics coupled with motion calibration, which is based on intimate knowledge of motion dynamics. The second hurdle requires merging an understanding of motion dynamics with a deep knowledge of the peculiarities of the application at hand, as depicted in Figure 4.

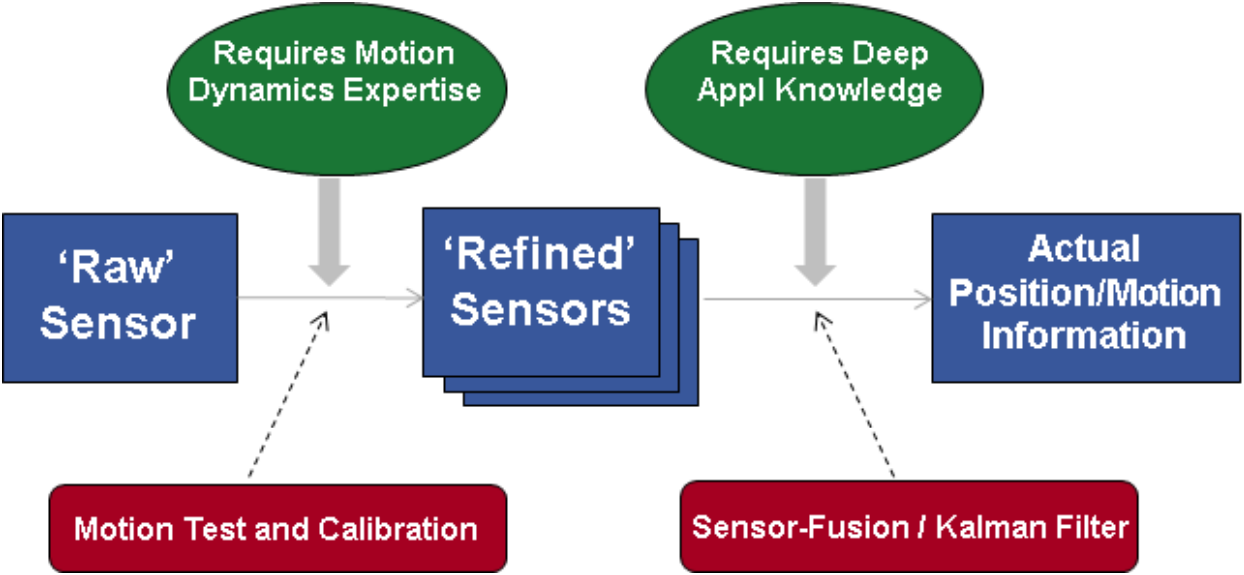
Figure 4. Precision Motion Detection Begins with High Performance Core Sensors, Coupled with Optimized Sensor Processing, and Embedded Application Intelligence.
Enabling High Value Medical Applications With Precision MEMS Sensors
MEMS inertial sensing is a highly mature technology in terms of both commercial viability and reliability. Beyond the well known use cases in mobile devices and gaming, significantly more challenging needs exist in the medical and industrial fields. In these cases, substantially higher performance is required, along with much more complete integration and sensor processing. The complexity of motion involved in medical navigation, for instance, dictates the need for starting with highly stable inertial sensors as a foundation, then building on this with optimized integration, sensor processing, and fusion. The availability of highly accurate and environmentally robust sensor developments is driving a new surge in the adoption of MEMS inertial sensors within the medical field. These inertial MEMS devices are capable of offering advantages in precision, size, power, redundancy, and accessibility over existing measurement/sensing approaches.
Fortunately, many of the principles required for solving these next-generation medical challenges are based on proven approaches from classical industrial navigation problems, including sensor fusion and processing techniques.
著者について




















