Thought Leadership


 詳細を閉じる
詳細を閉じる
LIDARによる知覚が抱える課題
完全な自動運転車を実現するには、人間の運転能力を再現するために、多数のセンサーを使用したシステムが必要になります。通常、人間は、2つの目、2つの耳、そして自動車からの触覚のフィードバックを利用して運転を行います。人間の脳は、これらすべての情報をリアルタイムで処理し、運転の経験が膨大に蓄積されたデータベースを参照します。人間の運転を再現するために必要なセンサーとしては、レーダー、LIDAR、カメラ、慣性計測ユニット(IMU:Inertial Measurement Unit)、超音波センサーなどが挙げられます。各システムにはそれぞれに長所がありますが、短所も存在します(図1)。1つのセンサーだけが非常に優れており、他のセンサーが不要になるということはまずありません。ただ、あらゆる自動運転ソリューションにおいて、LIDARは重要なデータを取得する役割を担うことになるはずです。本稿では、LIDARを利用する場合、最上位の設計においてどのような事柄について考慮すべきなのか解説します。

自動運転車において、LIDARはレーダーの緊密なパートナーとなります。どちらの技術も、可視光を使うことなく動作するという特徴を備えています。これは、夜間や照度が低い状況下で運転する上で非常に重要な意味を持ちます。レーダーは、長距離を対象とした検出や追従に適しています。一方、LIDARは高い角度分解能を備えており、物体の認知や識別に長けています。言い換えれば、レーダーはそこに何かがあることを検知するための有効な手段です。一方のLIDARは、レーダーが存在を確認した後、それについて詳細な識別を行う際に力を発揮します(図2)。

LIDARシステムを設計する際には、1つの技術的な課題に直面することになります。それは、目の安全性を確保するために、近赤外線の波長を制限値以下にとどめるということです。これについては、安全性を確保するためのガイドラインがIEC 60825-1で概説されています。重要なのは目の安全性を確保することです。ここで議論されるすべての側面は、目の安全に影響を及ぼす可能性があります。LIDARシステムには、様々なレベルで設計に複雑さをもたらす多くの異なるトポロジがあります。各トポロジには固有の長所と短所があります。
どの設計においても、核となる部分では共通する基本的な側面について注意を払うことが必要になります。目の安全以外の面で、システムの設計に影響を与える事柄としては、S/N比の最大化、検出の条件、視野、熱に関する考慮、消費電力、デッド・レコニング(自律航法)が挙げられます。
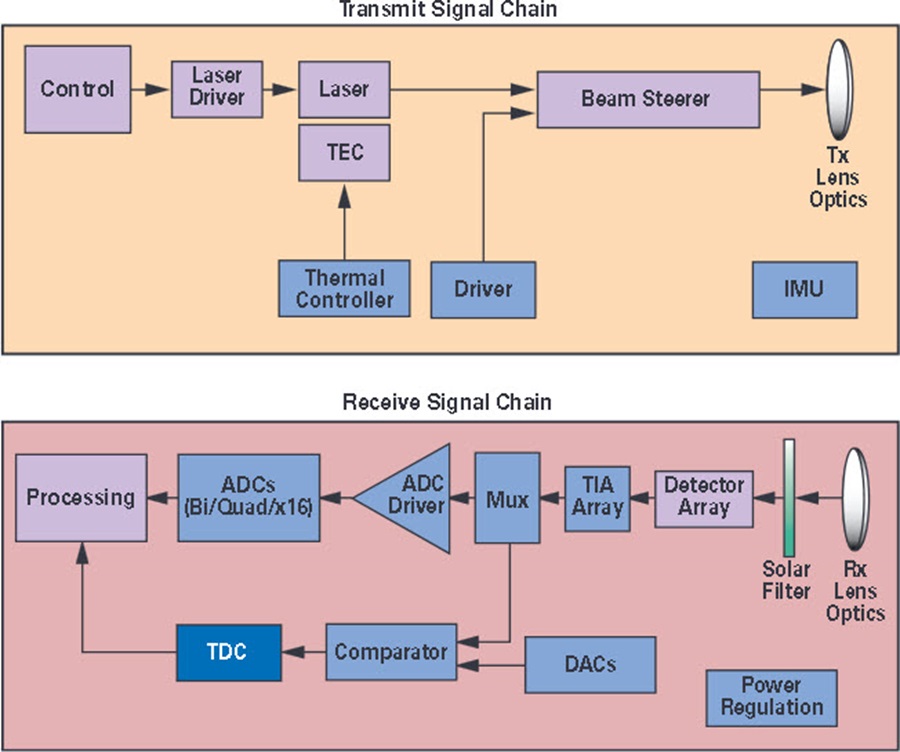
図3に、LIDARシステムのブロック図を示しました。受信側の経路について言えば、システムのS/N比は、遠い場所(100m~300m)にある小さな物体を検出する能力に影響を及ぼします。A/Dコンバータ(ADC)のノイズ・フロアは、受信経路における他のノイズ源のレベルを超えてはなりません。ADCのノイズ・フロアやプリント回路基板のノイズと比べて背景光や信号のショット・ノイズの影響が小さい場合、精度が制限されることになります。直接検出のトポロジにおいてToF(Time of Flight)を計算するには、システムが短いパルス(1~5ナノ秒以下)を出力でき、それをサンプリング・レートの高いADCで検出できることが必須となります。サンプリング速度が1GSPSであれば、受信経路においてToFを計算することが可能です。また、ADCの有効ビット数(ENOB)は、トランスインピーダンス・アンプ(TIA)からの信号を、クリップすることなく、フルレンジで出力できるレベルでなければなりません。
ここでは、システムが100m先にあるバスケットボールを検出する必要があると仮定します。TIAについては、距離だけでなく、対象となる物体の反射性と寸法に応じてS/N比の許容値が制限されます。ADCは、幅の狭いパルスを検出しなければなりません。それと同様に、TIAも同じパルスを検出できるだけの帯域幅を備えている必要があります。システムが対象とする物体までの距離、反射度、寸法はかなり広範なので、TIAは飽和が起きたとしてもそこから回復できなければなりません。TIAは、反射度の高い物体によって、送信された光が高い割合で戻ってくることで飽和する可能性があります。そうした物体の例としては、近くにある速度制限の標識などが考えられます。つまり、飽和は頻繁に発生する可能性があります。安全を確保する上では、システムが正確な情報を提供できるレベルに回復するまでの時間が非常に重要になります。
バスケットボールを検出する能力には、視野と角度分解能の要件も影響を及ぼします。視野の決定に大きな影響を与えるものとしては、送信/受信用の光部品が挙げられます。また、ある程度離れた位置にあるバスケットボールのような物体を検出した上で、それが何であるのかを識別する必要があるのか、それとも物体が存在することだけを検出すればよいのかということもポイントになります。それに応じて、必要な角度分解能が決まるからです。
システムを設計する際には、上記の機能を実現するために必要な電力について考察する必要があります。また、その消費電力によって発生する熱に対処する方法も検討しなければなりません。これらは、LIDARシステムの設計者にとって重要な課題になります。もちろん、シグナル・チェーンの消費電力が少なければ、ソリューション全体で発生する熱も少なくなります。コンポーネントの性能は、温度によってかなり変動する可能性があります。したがって、シグナル・チェーンに含まれるコンポーネントの中で温度の影響を受けやすいものについては、温度補償が必要になります。熱電コントローラは、高い精度でICを冷却/加熱するために活用できる優れた手段です。例えば、LIDARシステムの動作温度範囲内で波長と効率を維持するためには、レーザー・ダイオードに温度補償を適用する必要があります。
アバランシェ・フォトダイオードとレーザーは、バイアス用に数百V(正または負)の電圧を必要とすることがあります。設計においては、コンポーネントの数をできるだけ抑えつつ、高い効率でこのような電圧を生成できるようにする必要があります。高精度のリファレンス入力を供給するためには、高精度のD/Aコンバータ(DAC)を使用し、それに見合ったバイアス・ポイント、電流、電圧を生成しなければなりません。従来の1.8V~12Vの電圧ドメインに加えて、LIDARシステムならではの電圧レベルに対応しなければならないということです。従来使用していなかった電圧をソリューションに導入する場合には、電源ソリューションについて慎重な選択を行う必要があります。システムによって多くのチャンネルを柔軟に切り替えられるようにするために、シャットダウン・モードや省電力モードを備えるICや電源を選択することも重要です。
LIDARセンサーにIMUを組み込めば、多くのメリットが得られます。IMUセンサーは、多軸のジャイロ・センサーと加速度センサーを高度に結合し、安定化やナビゲーションの用途に向けて高い信頼性で位置と動きを識別する能力を提供します。MEMS(Micro Electro Mechanical Systems)をベースとする高精度のIMUであれば、複雑な動作環境下で極めてダイナミックな動きに直面したとしても、必要な精度を達成することができます。IMUを利用すれば、デッド・レコニング、位置の特定、安定化に対応する自動運転システムを実現できます。同様に、ADAS(先進運転支援システム)やGPSの性能が低下したり利用できなくなったりした場合でも、信頼できるデータがシステムに供給されます。IMUにはアップデート・レートが高い(1秒あたり数千サンプル)という長所があり、外部環境の変化の影響をほとんど受けません。IMUが安定すればするほど、長い時間にわたってシステムに重要な洞察が提供されることが保証されます。
IMUをLIDARモジュールに直接組み込むことにより、車載環境でよく見られる振動を検出、分析、補正することができます。例えば、IMUの出力を使うことで、自動車が道路上のくぼみの上を走った際に位置がずれないように、LIDARの点群(Point Cloud)をシフトすることができます。LIDARシステムの軸受の摩耗もIMUを使って検出することが可能です。そのため、路上で障害が発生する前にLIDARシステムを修理することもできます。
まとめ
LIDARシステムは非常に複雑です。S/N比の許容値、検出の条件、視野、熱の制限値、消費電力を決定するために製品について最初の定義を行う際には、十分に注意を払う必要があります。慎重にICを選択すると共に、どのコンポーネントが主に何に寄与するのかを理解することによって、設計を成功に導くことが可能になります。